
一种旋浆式流速传感器率定系统的设计
2012-12-27 06:55:22曾瑄涂振宇
华侨大学学报(自然科学版) 2012年1期
曾瑄,涂振宇
(南昌工程学院 机械与电气工程学院,江西 南昌 330099)
一种旋浆式流速传感器率定系统的设计
曾瑄,涂振宇
(南昌工程学院 机械与电气工程学院,江西 南昌 330099)
设计一种以单片机为主控单元的智能化低流速传感器率定系统.该系统通过单片机控制测量车在水槽上的行进来实现对流速的标定,可同时自动率定8支旋桨式流速传感器,从而提高低流速测定的准确性,使流速的测定误差小于1%.
流速仪;传感器;单片机;率定系统
水工模型测量的准确性关系到水利工程的质量与安全.微型旋浆式流速仪在低流速的水工模型测量领域被广泛使用,分析这种流速仪的产生误差的原因,主要就在旋桨传感器.要保证准确地测量,就应该定期对旋桨传感器进行标定.传统的比托管测定法既费时又耗电,而且精度较低,满足不了现代测量的需要.本文设计一种由单片机为主控单元的智能化低流速传感器率定系统,克服了传统方法的诸多缺点,具有较明显的实用价值.
1 总体方案
运用单片计算机技术,以玻璃水槽的水为静水,跑车为匀速运动,速度范围为2~200cm·s-1,一次率定8支流速仪传感器.具体有如下6个方面的要求:1)采用步进电机控制速度,以达到匀速运动,运行速度以4位数码显示;2)一次可率定8支流速传感器;3)运行的距离总长度为17m,分布为3个区段(匀加速、匀速、匀减速),区段分界点布置金属标识;4)运行的方向由手动控制;5)为防止跑车出轨,两端设断电保护;6)开始运行由遥控器点击,并且由蜂鸣器报告运行情况.
在一个长18m,宽1m的玻璃水槽上,平行固定2条等长的钢轨.跑车工作状态图,如图1所示.设置2个变速工作区和1个匀速工作区,变速工作区的长度为3.5m,匀速工作区的长度为10m.在区间分界点设置金属标识,跑车上装接近开关K,当K接近界标时,跑车自动转换成相应的工作状况[1].
在设置好跑车速度后,由遥控器点击开始,跑车里的蜂鸣器发出声响,跑车开始启动,并根据所设定的速度计算出加速值而匀加速;在进入匀速段前,逐步匀加速到设定的速度,在经过匀加速和匀速区段分界点的接近开关时,蜂鸣器发出声响,跑车进入匀速段,此时,流速计数器开始测计转数.在经过匀速和匀减速区段分界点的接近开关时,蜂鸣器又发出声响,流速计数器停止测计转数,跑车进入匀减速段,并且在匀减速段将跑车的速度减至到零,工作结束.
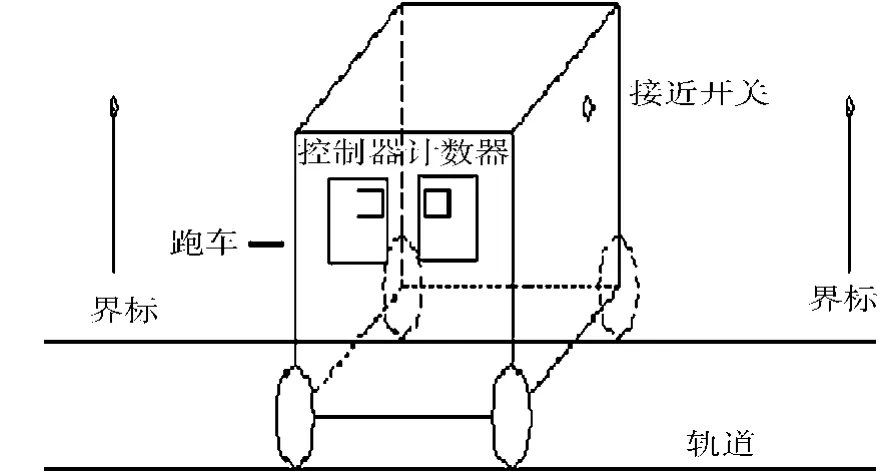
图1 跑车工作状态图Fig.1 Work status of sports car
2 设计原理
2.1 跑车部分
2.1.1 电机和机械部分 由于跑车的速度要求匀速,而异步电机的速度难以控制.步进电机具有精确步进和定位,只要输出恒定的频率,步进电机就能以给定的速度前进.因此,所选配BQH-300型步进电机驱动器采用高压恒流斩波方式驱动,具有高频特性好、输出转距大、功耗较低、运行平稳、噪音小等特点,且其内部设有过流和短路保护电路,提高了电机使用的安全性[2].然而,当电机处于暂停状态时,电机的一相或二相绕组始终不能断电,容易使电机烧坏,所以采用了MOC3041双相晶闸管(内含过零检测电路)作为交流负载隔离器.
图2为步进电机驱动器控制电路.由P1.4决定电机是否得电,这样既保护了电机,又降低了电路的能耗.为减少磨损和噪音,车轮采用铸铁轮,滚动部分采用含油轴承.

图2 步进电机驱动器控制电路Fig.2 Control circuit of the stepper motor driver
2.1.2 控制部分 由于跑车路程是开环运行,跑车需要来回运行,方向的控制需要十分可靠,否则将会发生跑车出轨事故.采用硬件和软件同时控制,意在提高可靠性.图3为方向控制电路.从图3可知:运行方向开关的状况采用双保险分二路读入[3],并与上一次的运行方向开关状况进行比较,发现不一致则启动跑车;若一致,控制器则自动输入与上一次的运行方向相反的命令,再启动跑车.
加速区和减速区的长度主要由电机的变速率决定,匀速区由流速仪传感器率定工作区,长度由钢轨和工作场地所决定,长度长则率定流速范围大.工作场地为17m,匀速区有10m,若率定时间100s,最大流速是100cm·s-1,若将率定时间缩短为50s,则率定流速可加大.
匀速区、加速区、减速区间分界点设置一金属标识,跑车上装一电感式接近开关K,当金属物体接近此作用表面时,产生开关信号,从而起到“开”、“关”的控制作用,速度控制电路如图4所示.从图4可知:当开关K接近金属标识时,输出信号经光电耦合器传送给反相器,触发D触发器74LS74,¯Q端输出一低电平,申请中断[4],控制器根据中断的次数,可以知道跑车运行在何区间.

图3 方向控制电路Fig.3 Circuit of direction control
率定系统的测量精度很大部分取决于运行速度的精度.虽然采用了步进电机,但仍然需要考虑其他因素,如机械传动部分的误差等.速度的常数是储存在存储器里,在每次使用前,系统首先检查速度常数是否正常,以免执行错误的速度常数;同时,将运行的速度在面板上显示出来,供操作者检查.
2.2 计数部分
在规定的时段內,同步记录8个通道旋浆的转数,该部分采用8线智能流速仪,其启动和关闭均由控制器决定.
3 测试结果
测量流速和旋浆转速之间满足关系式

其中:v为测量流速;N为旋浆的转动次数;t为转动时间;K,C均为需要率定的旋浆参数.
一般情况下,旋浆的率定均需取采样点8点以上,因此在2~200cm·s-1的速度区间选取了10个速度点进行对比测试,将实测速度(v实测)与理想速度(v理想)对比后,用最小二乘法拟合线性,然后对K,C值加以修正,使最终的修正速度(v修正)与设定速度的误差控制在1%的范围内,实验结果如表1所示.表1中:N为t=50s测量的转动次数.

表1 旋浆率定修正表Tab.1 Correction table of propeller calibration
4 结束语
利用单片机对测量车得运行控制,实现对低流速仪的传感器——旋浆的率定.其特点是结构简单、原理清晰,在测定过程中对旋浆进行修正和完善,保持了测量的连续性和准确性,具有良好的可靠性和稳定性,已达到系统误差小,使用简单方便的设计目标.因此,在水利工程和其他低流速测量领域具有一定的推广应用价值[5].
[1]吴葆仁,吴辰.旋桨式海流计的水槽率定[J].海洋技术,1997,16(1):41-46.
[2]曾瑄,陈云翔,樊宜.一种智能化的流速率定系统[J].江西水利科技,2000,26(4):214-216.
[3]蔡明生.电子设计[M].北京:高等教育出版社,2004.
[4]何立民.单片机应用技术选编[M].北京:航空航天大学出版社,2004.
[5]吴新生,许明,魏国远.长江防洪模型量测控制系统的设计与应用[J].人民长江,2009,40(19):72-74.
Design of Propeller-Velocity Sensor Calibration System
ZENG Xuan,TU Zhen-yu
(School of Mechanical and Electrical Engineering,Nanchang Institute of Technology,Nanchang 330099,China)
A calibration system for an intelligent low flow velocity current meter is designed with the single-chip microprocessor as the main control unit.The calibration of flow velocity is implemented by the measuring the movement of a survey vehicle in the sink controlled by the single-chip microprocessor,also the main parameters of the eight propeller velocity sensors can be automatically calibrated at the same time to improve the correctness of velocity determination so that the velocity measurement error could be reduced to less than 1%.
current meter;sensor;single-chip microprocessor;calibration system
陈志贤 英文审校:郑亚青)
P 335.1
A
1000-5013(2012)01-0006-03
2011-07-30
曾瑄(1967-),女,副教授,主要从事智能化传感器率定系统的研究.E-mail:zengxuan3@yahoo.com.cn.
江西省教育厅科研基金资助项目(GJJ11643)
猜你喜欢
福建中学数学(2021年5期)2021-03-01 02:05:44
语数外学习·高中版中旬(2020年8期)2020-09-10 21:53:41
汽车维护与修理(2019年3期)2019-08-08 02:29:10
汽车维护与修理(2018年5期)2018-09-29 02:41:46
汽车维护与修理(2018年23期)2018-07-03 07:10:10
汽车维护与修理(2017年5期)2017-11-17 01:54:49
中学数学杂志(高中版)(2016年5期)2016-11-01 14:02:58
好孩子画报(2015年5期)2015-05-19 13:31:15
时代风采(2009年21期)2009-03-23 05:34:12
初中生·考试(2004年11期)2004-11-25 07:46:00
