基于车速鉴定的两轮车碰撞事故取证技术研究
2012-12-26 11:49:10邵祖峰
河北公安警察职业学院学报 2012年2期
邵祖峰
(湖北警官学院,湖北 武汉 430034)
基于车速鉴定的两轮车碰撞事故取证技术研究
邵祖峰
(湖北警官学院,湖北 武汉 430034)
我国是一个两轮车大国,涉及两轮车的交通事故鉴定正逐步兴起。在分析两轮车碰撞事故特点的基础上,详细介绍了三种不同类型的两轮车事故速度鉴定思路及其相应的计算公式,并对其参数及其测量的要点进行了说明。
两轮车;交通事故;车速鉴定;取证
中国是一个潜力极大的汽车市场,车辆的保有量已经突破2.23亿辆。摩托车由于其成本低廉与灵活机动性,成为车辆保有量中的绝对主体。随着机动车下乡优惠政策的普及,大部分摩托车将分布在三、四线城市以及广大的农村。这种变化使得传统的交通模式向机动车方式快速转换,但行为人的交通素质却还处于原有的状态。由此涉及到摩托车的交通事故将成为农村地区或偏远城区的交通事故类型主体。对于城市交通则同样存在类似摩托车事故的问题,涉及电动自行车的交通事故也不断频发。如何鉴别此类事故中涉案车辆的行驶速度正成为道路交通事故鉴定中的常见类型之一。
按照现行的交通法规,两轮车大体分为摩托车和非机动车,电动车和自行车暂时划归非机动车范畴。但从研究的角度而言,电动车由于其自身的特殊性,其交通行为往往与摩托车类似,事故的碰撞类型更接近摩托车。因此,一般将电动车划归摩托车事故之列。按照现行交通事故统计的涉及两轮车的交通事故违章行为来看,主要是交叉路口的抢红灯(或黄灯)、随意变更机动车道和逆行,所以碰撞发生的类型主要是直角侧面碰撞和沿着车身纵轴线的追尾或迎面碰撞。本文所研究的两轮车碰撞事故车速鉴定将以直角侧面碰撞和追尾为主要研究点。
一、两轮车碰撞事故车速鉴定思路
(一)两轮车碰撞事故特点
研究者对两轮车碰撞事故做过详细的分类,一般将两轮车事故分为迎面冲撞型、侧面碰撞型和尾撞型三类。迎面冲撞型是指摩托车向着汽车侧面撞击,撞击的结果是摩托车的前叉向后弯曲移位,前轮受前后方的压缩变成椭圆形。汽车对摩托车侧面实施撞击时,称为侧面撞击型。尾撞型事故主要发生在汽车与前行的自行车之间,其肇事主要原因在于两者之间的速度差太大,车间间距不合理。
迎面撞击型事故的特点是摩托车向汽车的侧面冲撞,首先是前轮接触汽车,使摩托车的前叉向后移位,当前叉向后移位被车架顶住时,这时前轮开始由圆形变为椭圆,车辆的轴距开始减小。车上的骑乘人则发生两种可能运动变化趋势,一是骑车人和车体一起向汽车冲击后反弹回来,粘着运动。二是骑乘人离开摩托车跳跃到汽车的顶盖上。此时均可以视骑乘人与摩托车的恢复系数为零。假定汽车行驶方向为水平X轴,垂直方向为Y轴,则摩托车与骑乘人在撞击后具有与汽车碰撞后速度Y方向的分量值。该速度的水平X方向的值则为汽车撞击前的速度(非粘着碰撞,此时摩托车与汽车车体分开)。
侧面碰撞型事故发生时,按照碰撞点与摩托车车体重心之间的关系,分为汽车向摩托车重心碰撞、向重心后侧碰撞和向重心前侧碰撞。向重心碰撞时,一般被碰的摩托车整体全部或大部分位于汽车前端范围内。因速度合成的关系,骑乘人、摩托车被推到汽车右前方,摩托车立即翻倒在路面滑移,骑乘人则跳跃出一段距离后,倒向路面滑移。轿车则采取紧急措施制动,滑移一段距离停止。汽车撞击摩托车重心后端时,出现偏置碰撞,摩托车绕其重心旋转,车辆前端与汽车的右侧面发生二次碰撞。摩托车整体的运动趋势是一边旋转,一边向右侧前方滑移。车上的骑乘人由于惯性的作用,飞离车体,继续按原来的方向抛出运动。汽车撞击摩托车重心前端时,同样出现偏置碰撞,摩托车会发生向左旋转,车体的全部质量会发生与汽车车体左侧面的二次碰撞,并将能量几乎全部传给汽车,汽车可能向滑移右前方。
追尾型碰撞发生时,摩托车及其骑乘人的运动初始方向与汽车相同,受到撞击后,汽车驾驶员会立即踩制动逐步停车,摩托车在惯性力的作用下,其车体与人体分开,弹跳到前方,滑移直至停止。
(二)基于经验公式拟合的车速鉴定思路
两轮车与汽车发生碰撞的场合,遗留下的痕迹性数据不太完全,难以推断车辆速度。因此事故现场两轮车及其骑乘人与碰撞汽车之间的位置关系,拟合求解事故前的碰撞速度,成为重要的途径。利用价值比较大的是两轮车和骑乘人的抛距,这是拟合经验公式的常用自变量。许洪国教授编著的汽车事故工程上引入了诸多国外研究成果,比如利用抛距估算碰撞速度、骑乘人的抛距与碰撞速度、自行车抛距与碰撞速度、骑车人当量抛距与速度、事故现场骑车人与汽车间的距离与速度、事故现场自行车与汽车间的距离与速度、自行车与骑车人抛距的相关性、自行车滑移距离与速度、骑乘人滑移距离与速度、汽车碰撞速度与骑车人受伤程度的关系、摩托车碰撞变形与碰撞速度,等等。上述经验公式都是国外研究者基于某种碰撞假设情形下的拟合结果,拟合公式应用的场合具有很大局限性,特别强调碰撞的相似性。利用经验公式的观测结果,可以初步判断碰撞车速的大致范围。
(三)基于动量定理等经典力学的车速计算思路
由于汽车碰撞过程中,碰撞力相对其他外力显著较大,碰撞的持续时间较短,因此碰撞前后的动量守恒。动量定理在汽车碰撞事故中应用较多。应用动量定理计算碰撞车速的前提是了解事故现场情形,弄清碰撞的运动过程,建立碰撞模型,设计好相关变量,现场测量采取,进行求解。从碰撞情形来看,主要分为三种,包括摩托车迎面冲撞性、汽车侧面碰撞型和追尾型。其计算思路分别如下图 1、 2、 3。
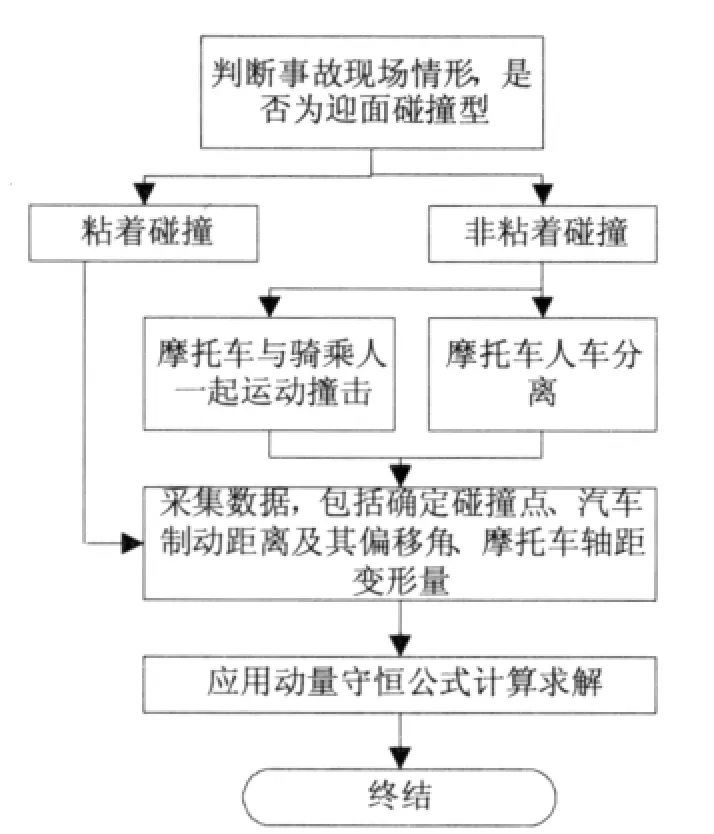
图1 摩托车迎面冲撞型
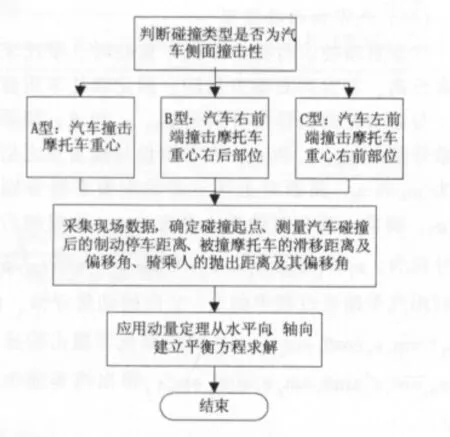
图2 汽车侧面碰撞型计算思路
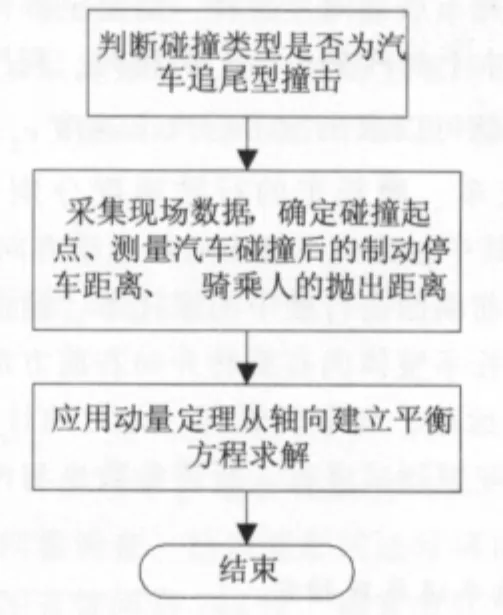
图3 汽车追尾型碰撞计算思路
二、两轮车碰撞事故车速鉴定常用计算公式及参数来源
(一)摩托车迎面碰撞型
迎面冲撞类型事故发生时,由于两者的质量差距较大,汽车的行驶速度基本不变,可以认为汽车碰撞后的速度等于碰撞前的水平X向行驶速度。这里假定为φ制动附着系数、S1为制动距离,m1、m2为摩托车、汽车质量,利用公式直接推算车辆碰撞前速度,此时摩托车的行驶速度则可以依据车辆的轴距变形量D(单位:cm),利用公式v'20=1.5D+12(单位:km/h)推算出标准碰撞速度,在利用当量转换公式得出实际碰撞前速度。
当摩托车以较高速度碰撞汽车侧面时,汽车的行驶方向会偏移,进一步假定偏移角为α,继续假定骑乘人的质量为mp,则v20=v2x=v2cosα,这里的v2由汽车制动距离反推计算。对于摩托车的速度,则可以有Y方向的动量守恒计算得出,分为两种情况:①摩托车人车未分离,一起撞向汽车时,则有 (m1+mp)v10=(m1+m2+mp)v2y,即v10=②摩托车人车分离时,撞击车辆的质量仅剩下摩托车,动量守恒式变为m1v10=(m1+m2)v2y,则
(二)汽车侧面碰撞型
汽车直接撞击行驶中摩托车重心时,摩托车、骑乘人两者分离,各自向右前方运动。假定摩托车质量、滑移距离、与运动方向偏移角分别为m1、s1和θ1,骑乘人对应的参数分别为mp、sp和θp,汽车质量与撞击点之后的制动距离为m2和s2,路面对上述三者的附着系数分别为φ1、φp和φ2。骑乘人骑车时的重心高度为h,则碰撞后三者的速度分别为:再利用汽车撞击过程中的X、Y向的动量守恒,由v10(m1+m2)=m1v1cosθ1+mpvpcosθp得出摩托车撞击前速度 v10;由m2v20=m1v1sinθ1+mpvpsinθp+m2v2得出汽车撞击前的速度v20。
汽车左前端撞击行驶中摩托车,撞击点位于车辆重心前端。摩托车后部向左旋转,动量全部传给汽车,其撞击后运动基本上与汽车水平X向相同。利用受撞击后汽车的运动参数就可以求出撞击后汽车速度撞击之前的汽车、摩托车的行驶速度分别为:v20=v2cosβ、v10=v2sinβ,其中β为汽车撞击后的运动方向改变偏移角。
汽车右前端撞击行驶中的摩托车,撞击点位于车辆重心后端。摩托车整体向右旋转并向右前方滑移,骑乘人则继续原方向运动,与车辆脱离。此时的计算同样按照X、Y向的动量守恒列式进行,所需参数也与汽车撞击车辆重心相同。
(三)汽车追尾碰撞型
汽车追尾型碰撞主要发生在汽车与自行车之间,两者之间速度差悬殊。动量守恒计算公式只有车辆轴向一个方向。即 (m1+mp)v10+m2v20=m1v1+mpvp+m2v2,参数的意义同前。可以利用事故现场采集的自行车、人体、汽车撞击后的制动或滑移距离,即可对应求出三者撞击后的速度v1、vp、v2之值。由于人体碰撞的完全塑性性质,以及自行车与汽车质量之间的悬殊性,可以假定碰撞之后三者具有相同的速度,并忽略骑乘人与自行车的动量影响,则有汽车撞击之前的行驶速度估计式:此值偏于保守。
三、两轮车碰撞事故车速鉴定取证要点分析
(一)碰撞点的确定
碰撞点的确定直接关系到事故现场诸多重要参数的测量与提取。两轮车与汽车碰撞发生时,由于两者之间的质量差悬殊,整个碰撞对汽车运动轨迹的变化影响较小,不会产生类似汽车与汽车之间碰撞时车辆制动痕迹的顿挫印、加重点,车辆部件与车上的尘土、碎石等也难以脱落,因此此类物证的现场勘查价值较小。但是两轮车及乘车人的运动变化情况,将会给碰撞点的确定提供相关信息。碰撞后的两轮车由于其重心不稳,极易倒地,车体部件与路面形成刮擦、沟槽,轮胎与地面之间有顿挫印迹。另外车体上的零部件或乘员携带物品,比如手包、钥匙、鞋帽等也会因撞击飞出脱落,可以利用事故现场遗留的多种飞出物品的落地点、可能的飞出高度与飞行方向,以及对两轮车行驶速度范围等信息,利用时空分析法,建立多种运动约束条件,缩减搜索查找范围,进而尽可能找准碰撞点。
(二)偏移角与抛距的测量
两轮车与汽车之间的碰撞事故发生时,摩托车、人体由于质量轻,极易改变运动方向。只有质量较小的轿车与质量相对较大摩托车发生重心前端碰撞时,汽车的运动方向因摩托车整体动量的侧向叠加,才会改变方向。因此在碰撞速度计算时,往往会以汽车整体的横向和轴向建立X、Y轴。因此测量偏移角时,也希望尽可能把各种碰撞体的运动变化角度纳入到这样的体系中。尽管本文中将运动体的变化方向作为偏移角,但由于各种运动体的初始运动方向与汽车的车体的横向或轴向相同,所以这种选择可以有利于实现角度转换,其本质是一致的。对于抛距的测量,要理解抛距是物体的飞行距离加上物体在路面上的滑移距离,测量抛距要以碰撞点为起点、物体滑移后的停止点为终点(具体选择要以倒地后的质心为依据)。对于计算碰撞后汽车的行驶速度所使用的制动距离,同样是以碰撞点与车辆到车辆停止点之间的距离。
(三)车辆技术参数与人体参数的设置
鉴定计算过程要用到有关车辆的技术参数,比如质量、外形尺寸等,可以查阅车辆相关的技术参数说明书。对于人体的参数可以按照一般性的统计数据设置,或者对骑乘人进行实际测量,包括体重、身高。人体骑乘时的重心可以依据骑乘姿势结合经验公式予以判定。一般而言,在立正姿势下,男子的重心在身体高度从下往上56%左右的地方,即肝脏上一点。女子则在55%左右的地方。其他鉴定相关的参数,包括驾驶员的一般反应时间为0.6-1s,汽车制动系统的协调时间为液压式小于0.35s、气压式小于0.60s,自行车行驶速度的常规范围普通车为8-12km/h、山地车为14-18km/h,摩托车城市道路或公路行驶速度常规范围要求小于60km/h,电动车的行驶速度范围一般位于18-25km/h,等等。这些参数对于保证计算过程的正确性,或者对计算结果的校验具有极大的帮助。
涉及两轮车的交通事故鉴定在我国正随着对交通事故处理科学性与公正性要求的提高,逐步被引入到道路交通事故处理之中。围绕两轮车鉴定的技术体系与方法还需要不断地完善,尤其一些经验型的数据需要在鉴定实践中加以总结推广。鉴定结论的准确性与交通事故现场勘查获取的证据密切相关,让民警了解相关鉴定技术规范,可以促进交通事故现场勘查技术的完善,两者相辅相成,互有裨益。
[1]许洪国.汽车事故工程[M].北京:人民交通出版社,2004.
[2]于长吉,淘沙.道路交通事故技术鉴定方法[M].大连:大连理工大学出版社,2011.
[3]李世明.人体运动环节重量参数测量新思路[M].北京:北京体育大学出版社,2004.
D631.5
A
1672-6405(2012)02-0020-03
邵祖峰(1972-),男,湖北仙桃人,湖北警官学院治安系交通管理教研室副教授。
2012-04-11
湖北省教育厅科学技术研究项目“道路交通事故车辆速度鉴定技术与取证规范研究”(项目编号:Q20104201)。
王凤玲]
猜你喜欢
现代畜牧科技(2021年5期)2021-07-20 08:07:22
小天使·一年级语数英综合(2021年3期)2021-05-08 06:10:31
科学导报·学术(2020年12期)2020-04-14 18:51:08
玩具世界(2019年5期)2019-11-25 07:40:14
小学生学习指导(爆笑校园)(2018年5期)2018-09-10 02:47:32
汽车维护与修理(2018年1期)2018-04-04 01:13:22
中国自行车(2017年5期)2017-06-24 10:45:48
智慧少年(2016年2期)2016-06-24 06:12:54
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33