
用摄影测量观念理解InSAR技术
2012-12-11 06:08靳国旺
测绘通报 2012年1期
靳国旺
(1.信息工程大学 地理空间信息学院,河南郑州450052;2.中国测绘科学研究院,北京100039)
一、引 言
传统的摄影测量是利用光学摄影机获取被测对象的硬拷贝像片,研究和确定所摄物体的形状、大小、性质及其空间位置的理论、技术和方法[1]。经历了模拟摄影测量、解析摄影测量和数字摄影测量3个阶段,如今其概念已得到扩展。授课过程中,通常把摄影测量定义为:摄影测量是利用摄影机或其他传感器采集被测对象的图像信息,通过加工处理和分析,获取有价值的可靠信息的理论和技术[2]。从所处理的图像来看,目前的摄影测量既可以处理传统的硬拷贝像片,又可以处理数字化影像或数字影像。按获取影像的传感器类别划分,摄影测量可分为光学(可见光)摄影测量、雷达摄影测量和X射线摄影测量等。
由于利用雷达传感器获取被测对象图像的方式与传统摄影方法获取目标图像的方式不同,关于“雷达摄影测量”概念是否合适尚存在一些分歧。结合扩展的摄影测量定义,本文认为利用雷达传感器获取被测对象的图像信息属于广义摄影的范畴,“雷达摄影测量”概念正确,它是利用雷达成像传感器获取被测对象的图像信息,通过加工、处理和分析,获取被测对象的形状、大小、空间位置、性质[3]及相互关系等有价值的可靠信息的理论和技术,是摄影测量的重要分支之一。雷达摄影测量中,合成孔径雷达(synthetic aperture radar,SAR)技术和合成孔径雷达干涉测量(interferometric synthetic aperture radar,InSAR)技术各有所长。
在测绘生产中,光学摄影测量技术应用较多,但随着近年来国家西部大开发战略的实施和国家测图工程的开展,面向常年阴雨、云雾地区测绘的雷达摄影测量技术迅速发展和应用,特别是具有快速、全天时、全天候、高精度等突出优势的InSAR技术已在全球地形测绘中发挥了重要作用,受到广泛关注。但InSAR技术往往被视为与摄影测量不同的技术,容易忽视它与传统光学摄影测量的共性。因此本文将分析、总结InSAR技术与传统光学摄影测量技术的相通之处,提出用摄影测量观念看待InSAR技术的理念,强调InSAR技术是一种广义的摄影测量技术,结合测绘生产需求,设计InSAR测绘作业流程,给出一些需要注意的问题。
二、InSAR简述
InSAR是利用具有一定视角差的两部天线(或一部天线两次经过)获取被测对象具有相干性的复数图像信息,并通过匹配、干涉图滤波、相位解缠、基线估计、相位高程转换等处理环节,由其干涉相位反演地形信息或者形变信息的理论和技术[5]。
如图1所示,InSAR处理流程主要包括:主辅图像匹配、预滤波、干涉图生成、去平地效应、干涉图滤波、干涉质量评价、相位解缠、基线估计、高程信息反演、DEM重建和正射影像制作等步骤。其中,预滤波和去平地效应为可选步骤,在一些处理方案中可不采用。
InSAR技术已在全球高精度地形测绘中表现出了非凡优势[5],它在常年多云、多雨、多雾地区的地形测绘中具有重要的应用价值。但我国面向测绘生产的InSAR技术研究起步较晚,忽视了InSAR技术与传统光学摄影测量技术之间的密切联系,影响了我国InSAR技术的实用化进程。
为了增进对InSAR技术的理解,本文将总结InSAR与摄影测量之间的共性,提出了用摄影测量观念理解InSAR技术的理念,以期借鉴现有的摄影测量生产经验设计实用化的InSAR测绘生产方案。
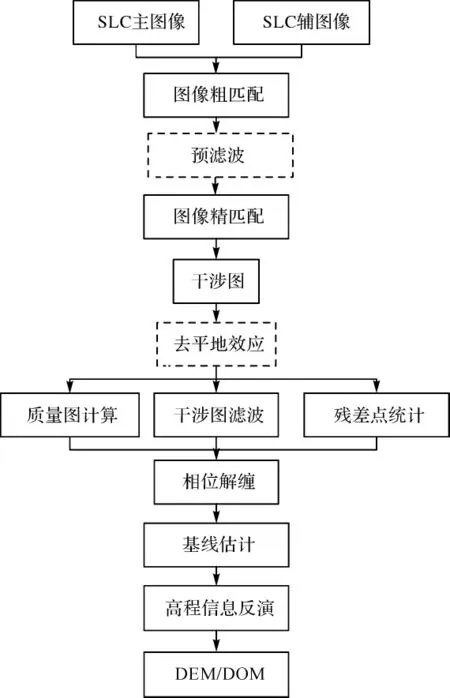
图1 InSAR处理流程
三、InSAR与光学摄影测量的共性
(1)均利用电磁波成像
虽然传统的摄影是利用可见光成像,属于被动成像方式,而雷达成像依靠雷达系统发射微波成像,属于主动成像方式,但不管是可见光还是微波,它们都属于广义的电磁波,利用它们获取被测目标的图像均属于广义的摄影范畴。
(2)成像时均满足角分辨率的理论公式
无论是光学成像,还是雷达成像,它们都属于电磁波成像,在成像规律上存在同一性。对于真实孔径成像,若以ρθ表示角分辨率;λ表示波长;D表示孔径大小;k表示经验系数。则它们都满足角分辨率的理论公式

从式(1)可以看出,在孔径相通的条件下,波长越长,角分辨率越低,而微波波长比光波波长大几个数量级,所以真实孔径雷达成像的角分辨率较低。为了提高成像分辨率,已广泛采用合成孔径雷达成像方式,即利用相干方式成像来提高分辨率,这容易引起误解:SAR成像和光学成像存在本质差异。
如前所述,若采用真实孔径成像方式,雷达成像分辨率要比光学成像分辨率低几个数量级,因此为了提高分辨率,雷达成像一般采用合成孔径方式。而目前的光学成像系统即使采用真实孔径方式成像,分辨率也能满足大量应用需求,所以往往忽视光学相干成像方式。实际上,无论是雷达系统还是光学系统,均可采用相干成像方式提高成像的分辨率,其分辨率极限均取决于所采用的电磁波信号的带宽。所以,为了进一步提高光学系统的成像分辨率,采用合成孔径方式成像必将成为重要的发展方向。
(3)所得图像都是从三维空间向二维平面的投影
传统光学摄影采用的是中心投影方式,满足像点、投影中心、物点3点共线的条件,可用共线条件方程来表达物点和像点之间的关系;SAR成像采用的是距离投影,满足天线相位中心与物点之间的距离与像点所代表的距离相等条件,可用距离条件和多普勒条件表示物点和像点之间的关系。
换言之,光学图像和SAR图像都是对三维空间的二维投影,其物点和像点之间的关系均可由两个方程式构成的方程组来表达,区别仅是方程的形式不同。
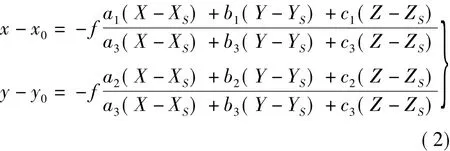
对于光学图像,若以(x,y)表示像点坐标,(x0,y0,-f)表示摄影像片的内方位元素;(X,Y,Z)表示地面点坐标;(XS,YS,ZS)表示摄站点坐标;(ai,b,ci)(i=1,2,3)表示方向余弦。则摄影时的共线条件方程可表达为
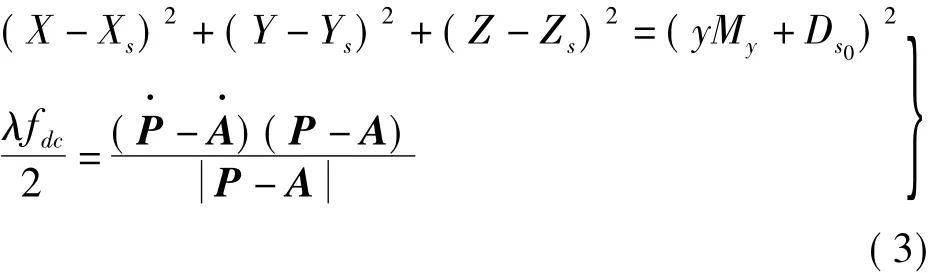
对于SAR图像,若以(x,y)表示SAR斜距图像像点坐标;(X,Y,Z)表示地面点坐标;Ds0表示近距延迟;My表示图像的斜距向采样间隔;λ表示雷达波波长;fdc表示多普勒频移;P表示目标点的位置矢量;表示目标点的速度矢量;矢量A表示天线相位中心的位置矢量;表示天线相位中心的速度矢量。则SAR成像时满足的方程为
(4)都离不开三角形交会
无论是光学立体摄影测量,还是InSAR测量,其基本原理都离不开三角形交会。如图2所示,光学立体摄影测量采用的是两条直线相交,可理解为是角度交会;而InSAR采用的是两个圆弧相交,可理解为距离交会。
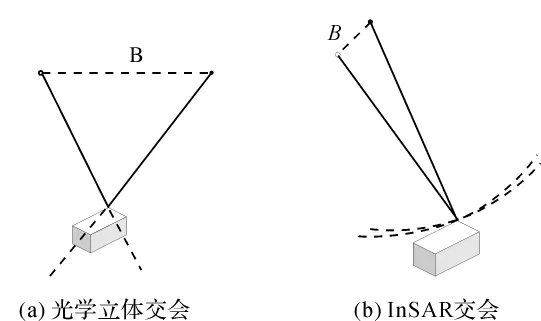
图2 交会三角形
(5)均利用“视差”测量
在光学立体摄影测量中,左右视差与被测目标的高度(深度)密切联系,左右视差的变化直接反应了高度的变化;在InSAR中,地面高程的变化反映在干涉相位的变化中,其干涉相位与左右视差存在密切联系。若用p表示左右视差;Δφ表示解缠干涉相位;φ0表示干涉相位偏置;Mr表示距离向采样间隔。则以像素数表达的左右视差与干涉相位的关系为
重复轨道InSAR

双天线InSAR

在InSAR中,要求基线较短,此时干涉相位的变化对应的视差变化较小,因而一般目视难以发现其变化。
近几年快速发展的小基高比(短基线)光学摄影测量方法与InSAR测量方法存在很多相似之处,在短基线条件下,提高视差测量精度是提高目标测量精度的关键,因而需要重视相位信息的利用。
(6)为减少对控制点数量的需求,均需采用区域网平差方法
在可见光摄影测量生产作业中,通常采用区域网平差方法由少量地面控制点加密出测图用的大量地面控制点,从而实现稀疏控制条件下的大面积测图。
在前期InSAR研究和处理中,由于缺乏实际测绘生产需求牵引,忽视了对区域网平差技术的研究,同时也给人们造成了“InSAR与摄影测量不同,无需区域网平差”的观念。但随着国家西部测图工程的实施,如何在大区域范围内采用尽量少的地面控制点进行InSAR地形测图问题摆在我们面前。若不采用区域网平差方法进行InSAR处理,将存在以下问题:
1)对于每个干涉像对,都需要足够数量、分布合理的地面控制点。在大区域范围内完成所有干涉像对的干涉处理就需要大量、分布合理的地面控制点,从而需要消耗大量的时间、人力和财力;
2)试验结果表明,由于干涉参数解算误差的存在,不同干涉数据获取的DEM及正射影像之间存在较大的相对误差,影响了后续处理。因此,对于In-SAR处理而言,仍需借鉴传统摄影测量中已成熟运用的区域网平差思想,由少量的地面控制点,通过各干涉像对之间的同名连接点,解算各干涉像对的干涉参数并加密测图用的大量地面控制点。
(7)均可利用多基线策略提高稳健性
在突变地形、高楼林立的城市等特殊条件下,均需要采用多基线技术来解决病态问题,提高测量的可靠性和稳健性。
在传统光学摄影测量中,为了减小摄影测量处理中的病态问题,提高影像匹配的自动化程度和摄影测量的精度,往往采用多基线摄影测量方式。
在面向陡峭地形、城市等复杂情况测图时,InSAR技术难以有效发挥作用。若基线较短,获取的高程精度较低;若基线较长,虽然理论上能获取较高的高程精度,但由于叠掩、相位欠采样等因素的影响,很难有效地进行干涉图滤波和相位解缠,给其测绘应用带来困难。为了提高对复杂地表的干涉处理能力,也需采用多基线技术,它与多基线摄影测量技术具有相通性,充分利用不同基线干涉数据之间的互补信息,提高干涉测量的精度和可靠性。
(8)均涉及影像镶嵌、判读、调绘、控制点测量等
与光学摄影测量类似,InSAR测绘作业包括内业和外业两大部分。内业工作主要包括成像处理、干涉处理、同名点选点、影像判绘、矢量数据采集、编辑、控制点加密、干涉参数定标等工作;外业工作主要包括控制点布设、控制点测量、野外调绘等工作。
四、InSAR测绘作业流程设计
借鉴光学摄影测量作业方案,设计了如图3所示的InSAR测绘作业流程,主要包括:成像处理、辐射校正、几何参数与干涉参数定标和控制点加密、干涉处理、DEM和正射影像的镶嵌与分幅、矢量采集与编辑、调绘等关键步骤。
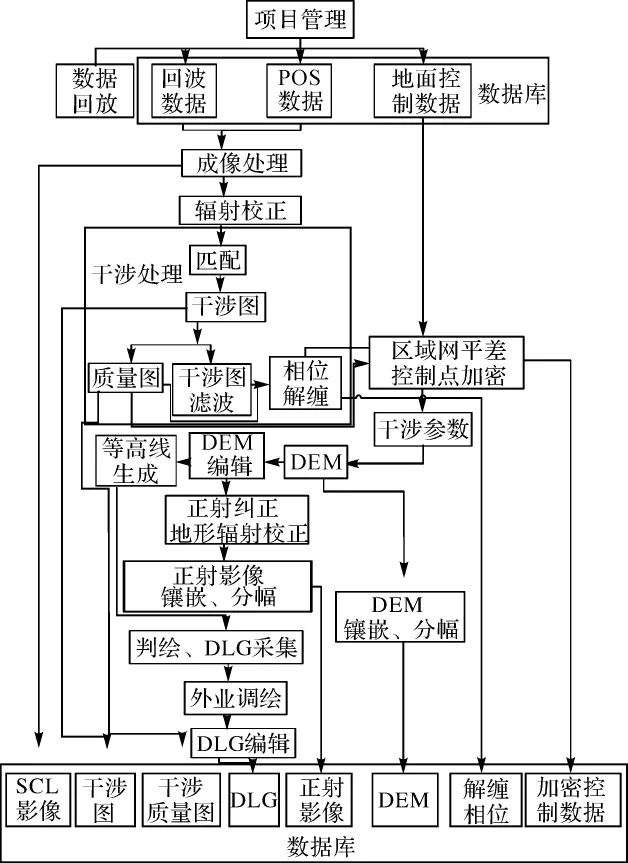
图3 InSAR测绘作业流程
在InSAR测绘作业中,需要注意以下细节问题:
1)对于相位解缠,应考虑相干性的影响,需考虑解缠的正确性和精度,而不是单纯地为了完成所有干涉数据的相位解缠。对于阴影、叠掩、水域及其他相干性较低的区域,可不进行解缠,而采用其他处理策略,以免影响后续处理。
2)由于噪声等因素的影响,获取的DEM中存在粗差,因此,干涉处理中需考虑DEM的粗差探测、剔除和人工编辑等工作。
3)为了减少系统误差积累,在SAR成像和干涉处理时,应采用方位向分块处理策略,而不是尽量大范围一次成像和干涉处理。
4)在布设地面控制点时,应考虑周边、均匀布设方案。
5)大区域InSAR处理时,应考虑各航线之间的适度重叠,以利于连接点选取、区域网平差和控制点加密等工作。
五、结束语
本文从摄影测量和雷达干涉测量的基本概念出发,分析、总结了传统光学摄影测量和雷达干涉测量之间的共同点,结合雷达干涉测量在实际测绘生产中所面临的问题,提出了用摄影测量观念理解InSAR技术的理念,设计了InSAR测绘作业流程,给出了一些需要注意的细节问题。
本文观点是笔者结合摄影测量教学实践和In-SAR技术的理论及应用研究提出的,仅代表个人观点,不妥之处敬请各位专家和同行批评指正。
[1]刘静宇.航空摄影测量学[M].北京:解放军出版社,1995.
[2]张保明,龚志辉,郭海涛.摄影测量学[M].北京:测绘出版社,2008.
[3]肖国超,朱彩英.雷达摄影测量[M].北京:地震出版社,2001.
[4]王之卓.摄影测量原理[M].武汉:武汉大学出版社,2007.
[5]靳国旺.InSAR地形测绘若干问题研究[D].北京:中国科学院电子学研究所,2011.
[6]靳国旺,吴一戎,向茂生,等.基于区域网平差的InSAR基线估计方法[J].测绘学报,2011,40(5):616-622.
[7]张红敏,靳国旺,徐青,等.中国余数定理在双基线In-SAR相位解缠中的应用[J].测绘学报,2011,40(6):770-777.
[8]张红敏,靳国旺,徐青,等.利用差分滤波进行多基线InSAR相位解缠[J].武汉大学学报:信息科学版,2011,36(9):1030-1034.
[9]李德仁,郑肇葆.解析摄影测量学[M].北京:测绘出版社,1992.
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
科学(2020年5期)2020-11-26
中国惯性技术学报(2019年3期)2019-10-15
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
舰船电子对抗(2016年5期)2016-12-13
安徽地质(2016年4期)2016-02-27
全球定位系统(2015年4期)2015-02-28
航天返回与遥感(2014年1期)2014-07-31
