
低次曲面模型精度的研究
2012-12-11 06:06赵传华党亚民秘金钟
测绘通报 2012年1期
赵传华,党亚民,秘金钟
(1.山东科技大学,山东青岛266510;2.中国测绘科学研究院,北京100830)
一、引 言
根据Dai和李的研究,用户位置电离层改正信息的计算可理解为各独立网络基线上的电离层误差信息的加权平均值。而采用不同改正模型的差别就在于基本公式中各内插系数或者各独立基线所对应的权值不同,其通用计算公式为(Dai,2001;李成刚,2005)

式中,V是包含各基线所包含的系统误差矢量,适用于电离层延迟误差、对流层延迟误差等距离相关误差;a是各基线系统误差矢量所对应的内插系数矢量。
为了建模或内插出虚拟参考站(VRS)网中与距离相关的空间误差(如轨道误差、对流层延迟和电离层延迟等),到目前为止,已经研究出了多种利用VRS网络数据生成误差改正数的方法。主要有线性组合法、基于距离的线性内插法、线性内插法、最小二乘配置法和低次曲面模型法,下面将对这些方法进行简单地介绍。
二、算法模型
线性组合法由Han Shaowei在2000年提出的,它不仅可以削弱甚至可以消除空间相关误差(如轨道误差、对流层延迟和电离层延迟),还能有效地减弱多路径效应及观测噪声的影响[1]。

距离相关内插算法主要基于参考站间距离对用户站的电离层延迟进行建模。其数学模型为[2],分别为用户流动站及各参考站相对于主参考站的双差电离层延迟估值;n为参考站数量;ci为空间相关内插参数,为参考站与用户流动站之间距离d的倒数,而
当VRS网中有3个或3个以上的基准站时,线性内插模型可用下式表示[3]
式中,ΔX和ΔY为各个基准站与主参考站的平面坐标值之差;a、b为ΔX和ΔY的系数。
最小二乘配置法(least-squares collocation,LSC)使用协方差阵信息将基准站的误差值内插出虚拟参考站的误差值。内插方程可表示为[4]

下面详细介绍一下低次曲面模型法(LSM)。
选定流动站周围的n个参考站,设定第n个参考站为主参考站并选定同样的卫星对,在模糊度固定后,计算参考站间的双差电离层延迟,再以低次曲面模型法作为区域内插模型计算流动站和主参考站之间的双差电离层延迟,其具体数学模型如下[5]

当参与计算的参考站数目n≥3时可以求得改正数内插系数矢量的最小二乘解

三、算例分析
由于低次曲面模型可以很好地逼近和拟合网络范围内电离层延迟的空间相关性。因此,本文采用一种加权的低次曲面模型计算河北省CORS网区域内的电离层延迟残差。本文选用其中的5条基线进行研究,采样率为30 s(如图1所示)。

图1 站点分布图
图1为选择的 5 条基线,分别用 1、2、3、4、5 表示,用原始观测数据计算得到双差电离层延迟值(计算值),然后采用其中的几条基线内插另一条基线的延迟值(估计值),即可计算出电离层延迟计算值和估计值的差值,从而验证内插模型的精度。为研究内插精度与基线的关系,本文设计了如下4种方案。
方案1:用4条基线内插1条基线(用2、3、4、5号基线内插1号基线),内插残差如图2所示。

图2 方案1的内插残差
方案2:用3条基线内插1条基线(用2、3、4号基线内插1号基线),内插残差如图3所示。

图3 方案2的内插残差
方案3:用3条基线内插1条基线(用2、3、5号基线内插1号基线),内插残差如图4所示。

图4 方案3的内插残差
方案4:用3条基线内插1条基线(用2、4、5号基线内插1号基线),内插残差如图5所示。
表1为4种方案的残差均值和RMS值。比较方案1和方案2、3、4,方案1的内插结果最好,精度最高,可以看出用4条基线内插1条基线的精度要比用3条基线内插1条基线的精度要高。比较方案2、3、4可看出,方案2、3的内插精度相差不大,方案4的内插精度最低。方案3比方案2的精度稍低,可能是因为5号基线比4号基线长,本身基线的双差电离层延迟就大,导致内插精度稍低;也可能是因为5号基线比4号基线离1号基线更远,由于空间位置关系导致内插精度低;也可能是这两方面原因起作用的缘故。方案4的内插精度最低,可能是4、5号基线离1号基线远,由空间位置关系造成的。
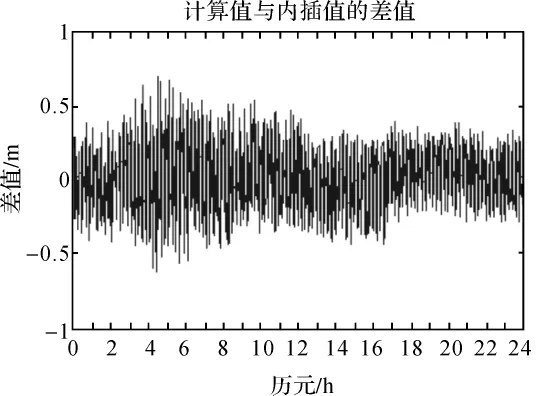
图5 方案4的内插残差

表1 4种方案的残差均值和RMS值 m
由以上试验可看出选择合适的基线运用低次曲面模型进行内插可以达到较高的精度,验证了该模型的可用性。基线条数、基线长度、基线间的空间位置关系各自对内插精度的影响将是下一步研究的重点。
四、结 论
本文重点介绍了低次曲面模型的方法和过程,并以实测数据验证了该模型的内插精度,得出了以下结论:①用4条基线内插1条基线的精度要比用3条基线内插1条基线的精度高;②选择合适的基线运用低次曲面模型进行内插可达到较高的精度;③内插精度可能与基线的长度和基线的空间位置关系都有联系;④ 运用更多的数据进行试验,验证基线条数、基线长度、基线间的空间位置关系各自对内插精度的影响将是下一步研究的重点。
[1]张锋.基于多参考站网络的 VRS算法研究与实现[D].郑州:信息工程大学,2007.[2]柏铭.QDCORS网的精度分析与完备性研究[D].青岛:山东科技大学,2009.
[3]张成军.虚拟参考站误差分析与算法研究[D].郑州:信息工程大学,2005.
[4]吕志伟.基于连续运行基准站的动态定位理论与方法研究[D].郑州:信息工程大学.2010.
[5]周东卫.虚拟参考站_VRS_技术的质量控制和完备性监测研究[D].四川:西南交通大学,2007.
[6]RAQUET.Development of a Method for Kinematic GPS Carrier-Phase Ambiguity Resolution Using Multiple Reference Receivers[D].Calgary:The University of Calgary,1998.
猜你喜欢
北京大学学报(自然科学版)(2022年4期)2022-08-18
大地测量与地球动力学(2022年1期)2022-01-11
空间科学学报(2021年4期)2021-08-30
空间科学学报(2021年2期)2021-07-21
测绘通报(2017年10期)2017-11-07
测绘学报(2017年4期)2017-05-12
雷达学报(2017年6期)2017-03-26
导航定位学报(2015年2期)2015-06-05
中国高新技术企业(2015年15期)2015-05-04
黑龙江工程学院学报(2015年2期)2015-04-19
