多轴起重机联合仿真平台开发
2012-12-03 14:51易小刚
中国机械工程 2012年9期
杨 勇 易小刚
1.三一集团有限公司研究总院博士后工作站,长沙,410100
2.华中科技大学,武汉,430074
0 引言
工程机械通常是集机械、电子、液压、控制等多个领域子系统于一体的复杂系统,多领域耦合是其显著特征[1-2]。当前CAE技术已经深入到产品开发的多个重要环节,但在产品设计的理论、方法和技术层面上存在较大差距,尤其是在产品创新设计方面缺乏必要的CAE技术手段及工具。开发自主知识产权的CAE分析软件对提升我国企业产品创新开发能力具有重要意义。
多轴起重机底盘的油气悬架和多桥电液辅助转向系统是起重机底盘的重要组成部分,它集成了机械结构、液压传动、电气控制等各分系统。各分系统的研制、全系统整合调试都会对起重机底盘功能指标的实现产生决定性的影响。本文开发的平台的目标就是:以多学科的专业分析仿真软件为基础,通过二次开发形成功能完备、使用方便、针对起重机全路面底盘特点的联合仿真平台;结合相关试验创建、修正并完善起重机底盘模型,通过大量可信分析,对底盘设计和调试提供有价值的参考和建议。
该平台的创新点在于:支持通过模型搭建自动生成面向工程机械、资源可重用、系统可重构的参数化应用分析工具,支持通过模型资源的扩充实现软件平台系统的升级。基于多领域统一建模仿真技术,可以形成工程机械多领域模型库,探索工程机械机、电、液、控制各子系统与整机之间的相互影响关系,进而对整机设计参数进行优化匹配[3],从而提高工程机械的性能,增强企业自主创新设计能力。
1 技术方案
本文以液压仿真软件AMESim、控制器设计软件MATLAB/Simulink、动力学仿真分析软件ADAMS为二次开发平台,建立起重机油气悬架及多桥转向系统多学科联合仿真分析平台[4-5],并结合相关试验,对起重机油气悬架和多桥转向系统进行深入研究。本平台的组织架构如图1所示,可以按如下步骤进行实施:

图1 起重机机械系统动力学平台架构
通过查阅资料、自主研究等方法,掌握油气悬架系统、多桥转向系统所涉及的理论;通过试验获得有关零部件及总成特性,如油气悬架的气室、油室以及液压阀的特性等,从试验结果中获得试验特性曲线,建立基础试验数据库。
将以上理论研究及基础试验研究的成果进行汇总与分类。对于液压、气动领域的问题,利用液压仿真软件AMESim,将相关知识及数据固化到软件中;对于电子电路、控制领域的问题,利用科学计算及控制软件MATLAB/Simulink及其二次开发功能,将相关知识及数据固化到软件中;对于机械系统领域的问题,利用动力学仿真分析软件ADAMS及其二次开发功能,将相关知识及数据固化到软件中。
结合某款多轴起重机底盘的设计开发,对以上开发工作进行应用。设置各软件间正确可靠的数据交换方式,通过开发出的独立界面,使其能够实现对油气悬架及多桥转向系统的综合性能[6-7]进行多学科联合仿真分析,从而指导油气悬架及多桥转向系统的开发;对悬架和转向系统的相互匹配,悬架系统的刚度阻尼控制规律,油气弹簧、阻尼调节阀的相关参数,多桥转向系统[8]的转向模式的选取、转向参数的确定、转向过程的控制等提出设计建议。
2 多轴起重机全轮转向二自由度模型推导
2.1 前提假设和变量说明
设x′o′y′为地面坐标系,用于研究多轴起重机与地面的相对运动;固定于多轴起重机的坐标系xoy用于描述多轴起重机的运动。作如下假设:
(1)分析时忽略悬架的作用,多轴起重机只做平行于地面的运动,并且沿x轴的前进速度u不变,这样多轴起重机就简化为沿y轴的侧向运动与绕z轴的横摆运动两个自由度。
(2)对应于模型分析中所有的角度运算,均按照小角度假设。
(3)轮胎侧偏特性处于线性范围,可以作为线性力学系统讨论。不考虑车轮纵向力对轮胎侧偏特性的影响,忽略空气动力的作用。
(4)以前轮转角为输入,忽略转向系统的影响,得到多轴起重机全轮转向二自由度模型。
2.2 全轮转向多轴起重机运动微分方程
根据线性化假设,全轮转向多轴起重机的平面运动方程组可表示为(具体推导过程参见文献[9])

式中,下标l、r分别表示左、右;v为多轴起重机侧向速度;u为多轴起重机前进速度;kij为各轮子的侧偏刚度;m为整车质量;Iz为横摆惯性力矩;αij为各转向轮侧偏角;ω为横摆角速度;di为质心到第i轴距离。
当转向角度δi和质心侧偏角β较小时,有β≈v/u,可推导出以下方程组:

式中,δij为各转向轮转角。
3 多轴起重机油气悬架与辅助转向系统的联合仿真平台
该平台应充分考虑机械、液压、控制各个专业领域之间的相互联系,能够实现悬架系统和转向系统所涉及的机械、液压、控制系统的多学科联合仿真分析。该平台软件具有独立界面、详细的参数化菜单及对话框,建模所需参数通过对话框填入,该平台应具有如下三个功能:
(1)参数化自动建模功能。通过该功能可以实现仅输入若干设计参数就可以完成对包含起重机油气悬架和多桥转向的汽车底盘系统进行自动参数化建模,模型中包含了转向、悬架系统各主要部件及其相互约束关系,并且对模型修改只需改变相应参数的大小即可,如图2所示。

图2 ADAMS中多体模型的参数化建立
(2)仿真工况的自动施加及多学科联合仿真功能。无论是起重机油气悬架系统还是多轴转向系统,要判断其设计质量,需要模拟其在各种工况下的工作状态,如各种路面条件、各种车速、各种转弯半径、各种转向模式等不同工况。通过本软件平台系统的工况自动施加功能,设计师只需输入少量工况参数,即可实现对各种工况模式的选择和工况参数的自动施加。
(3)分析数据的后处理功能。通过该功能可以对仿真计算所产生的大量分析数据进行有针对性的处理,使设计师能从诸多数据中得到底盘转向系统和悬架系统最关键参数的性能数据曲线,使设计师对其所设计的起重机悬架系统和转向系统性能一目了然。
4 油气悬架及多轴电液辅助转向系统多体及液压和控制模型
建立包含起重机油气悬架和多桥转向系统的整车多体及液压和控制模型,联合油气悬架及多桥转向的控制策略系统,模型系统组成如图3所示。对该模型进行仿真计算时需要借助于AMESim、MATLAB/Simulink、ADAMS等不同领域的仿真软件,软件平台间的变量传递如图4、图5所示。
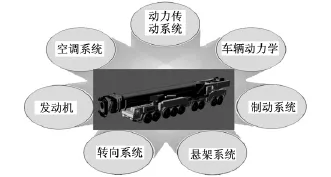
图3 起重机整车模型系统组成
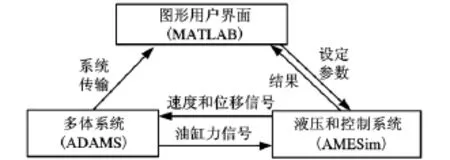
图4 三个软件平台之间的变量传递

图5 悬架系统、转向系统、控制系统的多体模型与液压系统模型的数据交互
通过AMESim与ADAMS之间的接口,各个平台分别利用自己的积分器计算自己的模型,通过预先统一的通讯间隔进行信息交换。要使用接口,首先必须设置环境变量AME_ADAMS_HOME为ADAMS的安装路径。这时AMESim是主控软件,需要在AMESim中运行并控制ADAMS的仿真进程。从ADAMS输出到AMESim有两种方式:①共同仿真模式。AMESim通知ADAMS在给定的时间间隔提供它的输出,由ADAMS自身来求解它的模型。
②连续模式。AMESim从ADAMS输入完整的系统模型并将所有的方程集成起来在AMESim中求解,此时ADAMS只起到函数评估器的作用。
然后定义状态变量,作为两个软件间的交换变量。本平台中ADAMS传递给AMESim的是油缸位移与速度信号,在ADAMS中的“Controls”菜单输出系统模型中,找到Plant Input和Plant Output建立相应接口模型;完成设置后,ADAMS将在当前的工作路径中创建3个文件:adams2amesim.inf、adm 和cmd。.inf文 件 包 括接口软件的基本信息:ADAMS的路径、ADAMS写入的文件名、求解器需要的信息、交换变量的定义、状态变量的数量;adm文件包括ADAMS求解器进行仿真运算时需要读取的ADAMS系统的信息;cmd文件包括所有ADAMS/View需要的相关系统的信息。
AMESim中建立的相应模型保存到上述三个文件所在目录中。打开AMESim中的“Interface”菜单,选择Import Adams model,在打开的对话框中选择在ADAMS中生成的.inf文件,AMESim将会自动填入在ADAMS中定义的输入输出变量到相关的空格中。从AMESim中的Sketch模式进入Parameter模式后,进入Cosimulation接口方块参数设置,其中communication interval为共仿真时AMESim和ADAMS的通讯步长。进入AMESim的Run模式仿真。如果选择共仿真方式,AMESim会启动A/Solver,两个软件同时计算。AMESim传递给ADAMS的是根据位移和速度计算得到的油缸力信号。
AMESim与 MATLAB/Simulink的接口需要在操作系统下安装Visual C++6.0,AMESim 4.2以上版本与 MATLAB 6.1以上版本(含Simulink)。确保环境变量“AME”的值为安装AMESim的路径;环境变量“MATLAB”的值为安装MATLAB的路径;环境变量“PATH”的值为MATLAB路径下的bin\win32。在 MATLAB命令窗口中使用 Mex-setup,选择VC作为编译器。在MATLAB的目录列表里加上AMESim与MATLAB接口文件所在的目录。
在ADAMS中建立多体模型、确定仿真工况、建立路面模型、生成接口文件,仿真过程中传递给MATLAB的是转向角度与起重机车速。在MATLAB中通过控制程序,需要满足转向系统各轴转向角度的阿克曼定律,然后将计算的控制信号传递给AMESim:编译完整系统模型、对系统进行仿真;LOAD SYSTEM:该程序可以生成MATLAB可调用的文件。
5 仿真与试验对比
建立参数化模型并设定工况仿真之后,需要进行试验验证。变线试验又称为移线试验,主要是考察汽车动力学参数在驾驶员—汽车组合系统中的作用。单移线试验时路线设置如图6、图7所示。试验中通过查看车辆的行驶轨迹、侧向加速度、横摆角速度、车身侧倾角,可以了解车辆的操纵稳定性能,试验与仿真对比可以验证模型的准确性。

图6 标桩设置示意图

图7 实车试验图
转向盘转角信号为试验测量数据,将其导入ADAMS中生成Spring样条曲线,进行转向盘的驱动,使得仿真与试验的转向盘信号输入完全一致。图8所示为0到14s时间段内转向盘右打约100°,再左打约100°的记录曲线。

图8 转向盘转角
图9为车辆质心的轨迹三维图,从图上可直观地看出车辆的运行轨迹是否符合试验单移线的要求。

图9 模型运动轨迹图
图10为侧向加速度的仿真与试验结果对比图(a为侧向加速度,g为重力加速度),两条曲线趋势几乎完全吻合。从10s到14s这段时间里仿真结果有些波动,这是数值计算不稳定造成的,但是其中间值与试验值几乎完全一致。除去少许不稳定值外,仿真与试验的误差在10%以内,仿真计算十分准确。

图10 车辆质心处侧向加速度对比
图11所示为横摆角速度的仿真结果与试验结果对比曲线,可见两条曲线的趋势完全一致,误差在10%以内。图12所示为车身侧倾角的仿真结果与试验结果对比曲线,两条曲线的趋势完全一致,后面一段曲线稍有差别是因为根据实际情况采取了制动,而仿真时却一直保持匀速。从仿真结果与试验结果的对比可以看出仿真模型十分准确。行驶轨迹与实际布桩情况吻合,侧向加速度、横摆角速度、侧偏角的仿真结果与试验结果相对误差在10%以内,曲线趋势完全一致。

图11 车辆横摆角速度对比

图12 车身侧倾角对比
6 结语
工程机械是由机械、液压与控制系统各种元件协同工作的复杂机电系统产品。单一的软件平台很难对这种多学科系统之间的相互作用进行仿真。本平台利用机械动力学软件ADAMS、液压仿真软件AMESim以及控制软件MATLAB等专业软件的优势,在各自的平台中利用自身的积分器计算模型,并通过预先统一的通讯间隔进行数据交换,对悬挂与转向系统设定具体参数和工况进行仿真。通过对比试验,证明了该平台的有效性。该平台也将在产品开发以及性能优化方面发挥重要作用。
[1]陈晓波.面向复杂产品设计的协同仿真关键技术研究[D].北京:清华大学,2003.
[2]郭斌,熊光楞,陈晓波.支持复杂产品设计的协同仿真平台研究[J].机械与电子,2002(4):26-29.
[3]马明旭,王成恩.复杂产品多学科设计优化技术[J].机械工程学报,2008,44(6):35-38.
[4]陈无畏,时培成.ADAMS和MATLAB的EPS和整车系统的联合仿真[J].农业机械学报,2007,38(2):57-59.
[5]朱冰,赵健.面向牵引力控制系统的AMESim与MATLAB联合仿真平台[J].吉林大学学报,2008,38(增刊):87-89.
[6]陈轶杰,王亚军,孟强.8×8轮式车辆半主动油气悬挂振动测试研究[J].振动与冲击,2009(9):101-104.
[7]陈轶杰,顾亮.阻尼可调油气弹簧特性分析与设计研究[J].振动与冲击,2008,27(8):97-100.
[8]王云超,高秀华.油气悬挂系统参数对多桥转向特性的影响[J].吉林大学学报,2007,37(2):87-91.
[9]余志生.汽车理论[M].北京:机械工业出版社,2000.
猜你喜欢
青少年科技博览(中学版)(2022年11期)2023-01-07
中国特种设备安全(2022年1期)2022-04-26
非常规油气(2021年2期)2021-05-24
中国海上油气(2020年6期)2020-03-15
中国特种设备安全(2019年7期)2019-09-10
能源(2017年5期)2017-07-06
北京汽车(2016年6期)2016-10-13
汽车实用技术(2015年8期)2015-12-26
船舶标准化工程师(2015年5期)2015-12-03
能源(2014年8期)2014-08-25