
微型机器人驱动技术发展及现状分析
2012-12-03 01:22:38杨杰伟赵江铭
郑州大学学报(工学版) 2012年2期
杨杰伟,赵江铭
(郑州大学机械工程学院,河南郑州450001)
0 引言
近年来,随着微电子机械系统(MEMS)的发展,作为其重要分支的微型机器人的研究也取得了长足发展,相关研究成果不断涌现.微型机器人结构尺寸微小,器件精密,可进行微细操作,具有小惯性、快速响应、高谐振频率、高附加值等特点[1].微型机器人并不是简单意义上普通机器人的微小化,微型机器人一般集成有传感、控制、执行和能量单元,是机械、电子、材料、控制、计算机和生物医学等多学科技术的交叉融合.
1 微型机器人的分类及驱动技术特点
微型机器人种类很多,按应用领域分为医疗用和工业用两类;按工作环境可分为管道微机器人、微飞行器和水下微机器人三类;按驱动方式可分为气动、微电机驱动、智能材料驱动、能量场驱动等;按移动方式可分为轮式、足式、蠕动式、泳动式等;按能源供给方式可分为有线和无线两种形式.
微机器人执行任务时首先要考虑的是其运动能力,最终目的是快速精确地到达目的地,因此,驱动技术在微机器人系统中起着至关重要的作用.微型自运动系统通常都需要有大输出力矩、大位移和低能量消耗的特点.
过去的几十年里,许多驱动原理已被报道,主要有静电、压电和电磁原理.静电驱动因气隙小而使输出力较小,此外,还有功耗低、响应快的特点;然而,却因垂直于电极的最大位移受限而不适用于需要位移大于几微米的应用系统.压电驱动有大气隙、大输出力和响应快的特点,但位移也受到严格限制,往往还需要很高的工作电压[2](几十至几百伏).电磁驱动有适中的输出力,位移较大,只需要低功耗、低电压的控制器;但复杂的电磁结构使其难以制造和微型化.
随着微机械加工工艺及智能材料的发展,各种各样的微机器人应用系统都在逐步使用能实现大输出力矩、高运动精度和强行进能力等运动特性的新型驱动系统.
2 国内外研究现状
目前,微型机器人常用的驱动技术概括起来主要有:气动、热驱动、微电机驱动、智能材料驱动和能量场驱动.其中,智能材料驱动常用的有形状记忆合金(SMA)[3]、人工肌肉材料(IPMC)[4]、压电材料(PZT)[5-6]、巨磁致伸缩材料(GMA)[7];能量场驱动常用的有微波、光波、磁场和超声波等能量场[8-9].
2.1 气动形式
韩国航空大学J.Lim等[10]研制出了单气动线路驱动的蚯蚓型管道检测微机器人(图1).该机器人由前气室、后气室和伸展模块3部分组成,3个气室被一个充气管道连接起来.首先,后气室逐渐充入空气并膨胀,机器人身体后部的夹钳紧贴到被检测管道表面;然后空气使伸展模块内的气室充气、膨胀,机器人就向前伸展身体;随着空气的不断充入,前气室也逐渐膨胀并达到特定气压值,身体前部的夹钳紧贴到管道表面;然后通过排气使后气室在气流反作用力下前进,同时伸展模块收缩.通过气阀使充气和排气循环交替进行,就实现了像蚯蚓一样的运动.改变充放气时间可改变机器人的运动速度.该机器人长70 mm,直径9 mm.
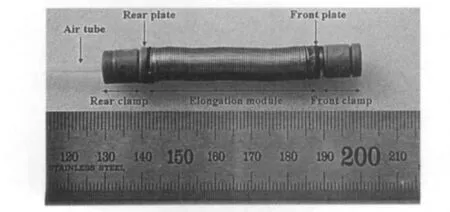
图1 蚯蚓型气动微机器人样机Fig.1 Inchworm prototype robot
2.2 热驱动形式
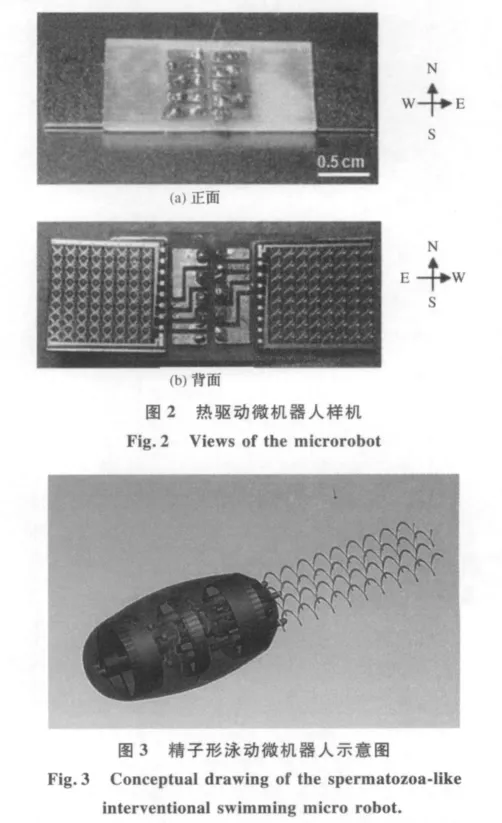
加利弗尼亚大学伯克利分校的E.Y.Erdem等[11]研制出了热驱动可全方向移动的微机器人.该机器人由PCB板骨架和微机械工艺制作的两个执行器阵列芯片组成(图2).每个芯片由8×8阵列的“运动点”组成,用以产生3自由度的平面运动,每个“运动点”由4个正交的热敏晶片组成,由它们产生机器人平面运动的4个方向.阵列中的热敏晶片按运动方向被分成4组,每组独立控制.热敏晶片由热膨胀系数不同的两层聚合物中夹一个钛钨合金电阻构成,当加热电流通过回路时,热敏晶片向热膨胀系数小的聚合物一侧弯曲,就实现了单自由度运动.该机器人长约3 cm、宽1 cm、高0.9 mm,重0.5 g,移动速度达25μm/s,可承受7倍于自身重量的负荷.该机器人最大的问题是能量消耗大及如何应对粗糙表面.
2.3 微电机驱动形式
南京航空航天大学的B.Chen等[12-13]研制出了微电机驱动的精子形微机器人.该微机器人由椭圆形的头部和4个柔软的鞭毛组成(图3),鞭毛由机器人头部内置的4个微电机驱动,当柔软的鞭毛被微电机带动在液体环境中旋转时,它们将形成又长又细的螺旋,液体作用于鞭毛的粘滞力将对微机器人产生推力从而使其前进.机器人内带减速齿轮的微电机长22 mm、直径4 mm;鞭毛由直径0.15 mm的SMA制成.
实验分析表明,可通过调整微机器人4个鞭毛的旋转方向有效地控制其游动方向.当4个鞭毛旋转方向一致时,机器人将旋转前进.
2.4 智能材料驱动形式
2.4.1 SMA驱动
韩国科技学院微系统研究中心的B.Kim等[14]研制了一种形状记忆合金(SMA)驱动的仿蚯蚓型微机器人.形状记忆合金和波纹管组合使微机器人伸缩前行,具体移动过程是:硅树脂波纹管作为弹簧提供变形力,当SMA弹簧被加热收缩时,微机器人前部的微针钳住接触面,躯干后部向前滑动,同时SMA外部的硅树脂波纹管收缩储存变形能;然后,SMA弹簧冷却,波纹管储存的变形能使SMA弹簧伸长,同时,后部的微针钳住接触面,躯干前部向前滑动;最后,波纹管和SMA弹簧回到初始平衡状态,二者弹力相等.SMA的伸缩靠控制系统对形状记忆合金加热-冷却循环交替实现.
该机器人采用无线射频模块控制,由碱性电池供电,图4为机器人样机.样机移动速度为10 mm/min.
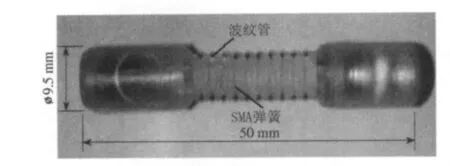
图4 蚯蚓型微机器人样机Fig.4 Assembled wireless microrobot
2.4.2 IPMC驱动
IPMC是一种人工肌肉材料,当对IPMC厚度方向施加电压时,IPMC会产生较大的变形,向阳极弯曲.由于其较低的驱动电压(大约1 V)能产生较大的位移变形,作为一种新型执行器非常适用于仿生机器人的开发.
日本Kagawa大学智能机械系统系和哈尔滨工程大学自动化学院的 Shu-xiang GUO等[15]研制出了采用人工肌肉材料IPMC驱动的鱼形微机器人(图5).该鱼形机器人头部是轻质木材,身体部分为两段IPMC材料,向两段IPMC材料施加极性相反的电压,它们便迅速向相反方向弯曲,当采用交流电源供电时,微机器人就能像鱼类S型游动一样前进.该机器人总长57 mm、宽10 mm、厚7 mm,仅重1.45 g.实验结果表明,改变输入电压的频率能控制其运动速度,输入电压频率在4 Hz时速度达到最大.
该机器人采用的是有线控制形式,为了进一步微型化,作者又提出了将提供控制信号的DSP控制器集成到机器人内部的无线控制方案.
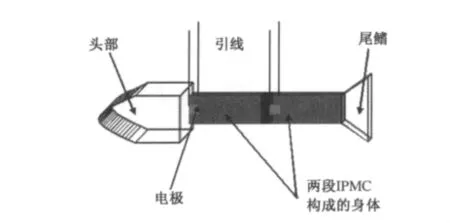
图5 鱼形微机器人结构示意图Fig.5 Structure of micro fish-like robot
IPMC材料除了应用于泳动机器人,还可用于行走机器人的驱动.Shu-xiang Guo等又设计了使用IPMC材料的单自由度和多自由度行走机器人.
2.5 能量场驱动形式
2.5.1 外部交变磁场驱动
韩国Chonnam 国立大学 D.Byun等[16]研制出了外部交变磁场驱动的蝌蚪形泳动微机器人.该机器人由丙烯酸主体、旋转轴、圆柱型钕铁硼永磁体和硅树脂尾鳍组成(图6),尾鳍直接与永磁体和旋转轴相连,在外部交变磁场作用下永磁体改变磁轴方向,永磁体绕旋转轴转动,从而带动尾鳍划水使微机器人前进和转向.该蝌蚪形机器人结构简单,但因使用了有两对赫尔姆霍茨线圈的EMA(电磁驱动)系统而能被精确控制,因此能在水中以各种姿势自由游动.其动作的改变是通过控制尾鳍的摆动角度和频率实现的.
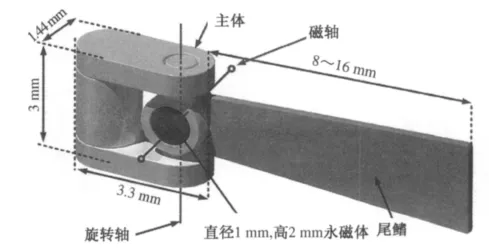
图6 蝌蚪形泳动微机器人结构示意图Fig.6 Isometric view of swimming robot
2.5.2 外部旋转磁场驱动
日本东北大学的K.Ishiyama和M.Sendoh等研制了外部旋转磁场驱动的泳动微机器人[17-18].微机器人主体由直径0.15 mm的金属线螺旋状缠绕在直径1.2 mm的NdFeB永磁体上构成(图7).当对微机器人施加外部旋转磁场时,永磁体被径向磁化,与外磁场同步旋转运动,螺旋结构给液体一个向后的作用力,微机器人在液体反作用力下就旋转前进.改变外磁场的方向可以控制机器人的运动方向,而运动速度则取决于外磁场的强度、频率和液体介质.
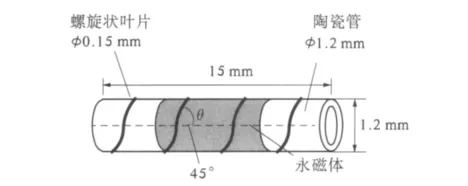
图7 外部旋转磁场驱动的泳动微机器人Fig.7 Schematic view of magnetic micro - machine
2.5.3 静磁场驱动
澳大利亚悉尼工程技术大学Hai-wei Lu等[19]研制出了采用线性电磁执行器驱动的尺蠖型微机器人(图8).该机器人外观上由管状主体和前后两段刚毛状腿或鳍组成.管状线性电磁执行器位于机器人主体内,由定子线圈和主要部件为永磁体的平动体组成,定子线圈附着在管状主体上,平动体是能使机器人伸缩的活动部件.前腿或鳍与管状主体固接,后腿或鳍与平动体固接,主体和平动体之间通过波纹管实现软连接,为辅助波纹管运动,定子线圈和平动体之间安装了辅助复位弹簧(图9).
给定子线圈通以一定电流时,平动体在电磁力作用下从初始位置向前移动,并带动后腿或鳍前进;当平动体达到最大允许伸展量时,切断电源,电磁力消失,机器人主体在波纹管和复位弹簧的作用下向前移动,同时后腿或鳍的自锁结构可以防止其向后滑动;然后平动体回复到相对于定子线圈的初始位置处,等待下一个工作循环.这样,按照一定相序给定子线圈施加电压,就可以控制定子线圈和永磁体之间的电磁力,使机器人像尺蠖运动一样前进.

该管状机器人直径7 mm,长10 mm,驱动力20 mN,一次伸展移动距离1.2 mm.该机器人既可以在平面上运动也可以在液体中前进.
3 发展现状分析
综观国内外的研究状况,智能材料和能量场驱动技术在微机器人领域应用较多,能量场驱动技术中的磁场驱动受到了更多关注,究其原因是磁场控制便捷、输出力大、无方向性、产生相对容易;相比而言,光波、微波、超声波的方向性很强,在应用方面受到了一定限制,而且,当应用于人体体内医疗检查时,对人体有一定的副作用.
应用于不同场合的微型机器人,需要根据其具体的工作环境来选择驱动形式.气动形式需要控制阀、空气压缩机和很长的气体管道,可以应用于工业领域;在医疗领域方面,较长的气体管道一方面会给患者带来不适和痛苦,另一方面会影响其在人体复杂内腔中运动的灵活性,增加前进的困难.热驱动形式如果解决了材料的生物兼容性、能量消耗及如何应对粗糙表面的问题,就可广泛应用于医疗领域.微电机驱动一般适用于工业领域,结构和制造工艺问题使其输出力矩和尺寸受到一定限制,在医疗领域的进一步发展也受到一定程度的限制.智能材料(尤其是SMA和IPMC)因集传感、控制和执行功能于一体,在人体体内医疗领域有着非常广阔的应用前景.
4 结论
综上所述,应用于传统工业领域的微机器人可以直接采用气动、热驱动、微电机驱动或能量场驱动形式;而应用于人体体内医疗的微机器人可采用微电机、外部能量场和智能材料驱动,但前提是微电机的制造工艺结合MEMS技术的发展而能使尺寸微型化到微米级的实用程度,而纳米磁材料和微加工技术的发展,使制造复杂的微型电磁结构并将其用于微机器人系统不再困难.此外,随着磁场驱动技术及对外场敏感的智能材料的进一步发展,微机器人的应用正逐步地向人体体内医疗领域延伸.采用高容量电池或能量供应的无线化及无线控制是微机器人技术向医疗领域延伸的一个重要发展方向.
[1] 许良.微医疗机器人旋转磁场驱动电源的研究[D].大连:大连理工大学机械工程学院,2006.
[2] KIMS H,HASHI S,ISHIYAMA K.Methodology of dynamic actuation for flexible magnetic actuator and biomimetic robotics application[J].IEEE Transactions on Magnetics,2010,46(6):1366-1369.
[3] ELWALEED A K,MOHAMED N A.A new concept of a linear smart actuator[J].Sensors and Actuators A,2007,135:244-249.
[4] GUO Shu-xiang,SHI Li-wei,ASAKA K.IPMC Actuator-based an underwater microrobot with 8 legs[C]//Proceedings of 2008 IEEE International Conference on Mechatronics and Automation,2008:551-556.
[5] FRIEND J,UMESHIMA A,ISHII T.A piezoelectric linear actuator formed from a multitude of bimorphs[J].Sensors and Actuators A,2004,109:242-251.
[6] SON K J,KARTIK V,WICKERT J,et al.A Piezoelectric unimorph actuator based precision positioning miniature walking Robot[C]//Proceedings of the 2005 IEEE/ASME International Conference on Advanced Intelligent Mechatronics,Monterey,California,2005:24-28.
[7] FUKUDA T,HOISOKAI H,OHYAMA H,et al.Giant magnetostrictive alloy(GMA)applications to micro mobile robot as a micro actuator without power supply cables[C]//Proceedings of IEEE Micro Electro Mechanical Systems Workshop.1991:210-215.
[8] SENDOH M,lSHIYAMA K.Fabrication of magnetic actuator for use in a capsule endoscope[J].IEEE Transactions on Magnetics,2003,39(5):3232-3234.
[9] TOMIE M,TAKIGUCHIA,HONDA T,et al.Turning performance of fish-type microrobot driven by external magnetic field[J].IEEE Transactions on Magnetics,2005,41(10):4015-4017.
[10] LIMJ,PARK H,AN J,et al.One pneumatic line based inchworm-like micro robot for half-inch pipe inspection[J].Mechatronics,2008,18:315-322.
[11] ERDEMY E,CHEN Yu-ming,SUH J W,et al.Thermally actuated omnidirectional walking microrobot[J].Journal of Microelectromechanical Systems,2010,19(3):433-442.
[12] CHEN Bai,LIU Yao-dong,CHEN Sun,et al.A Biomimetic spermatozoa propulsion method for interventional micro robot[J].Journal of Bionic Engineering,2008,(S):106–112.
[13] CHEN Bai,JIANG Su-rong,LIU Yao-dong,et al.Research on the kinematic properties of a sperm-like swimming micro robot[J].Journal of Bionic Engineering,2010,7(S):123–129.
[14] KIMB,LEE MG,LEE Y P,et al.An earthwormlike micro robot using shape memory alloy actuator[J].Sensors and Actuators A,2006,125:429-437.
[15] GUO Shu-xiang,GE Ya-ming,et al.Underwater swimming micro robot using IPMCactuator[C]//Proceedings of the 2006 IEEE International Conference on Mechatronics and Automation,IEEEPress,2006:25-28.
[16] BYUN,CHOI J,CHA K,et al.Swimming microrobot actuated by two pairs of helmholtz coils system[J].Mechatronics,2011,21:357-364.
[17] ISHIYAMA K,SENDOH M,YAMAZAKI A,et al.Swimming micro-machine driven by magnetic torque[J].Sensors and Actuators A,2001,91:141-144.
[18] SENDOH M,ISHIYAMA K,ARAI K I.Fabrication of magnetic actuator for use in a capsule endoscope[J].IEEE Transactions on Magnetics,2003,39(5):3232-3234.
[19] LU Hai-wei,ZHU Jian-guo,LIN Zhi-wei,et al.An inchworm mobile robot using electromagnetic linear actuator[J].Mechatronics,2009,19:1116-1125.
猜你喜欢
汽车实用技术(2022年7期)2022-04-20 11:45:04
氮肥与合成气(2021年12期)2021-12-04 09:09:24
微特电机(2021年1期)2021-01-25 03:23:14
房地产导刊(2020年11期)2020-12-28 01:32:30
仪表技术与传感器(2020年5期)2020-06-11 07:01:10
铁道通信信号(2019年4期)2019-10-10 03:42:56
大电机技术(2018年4期)2018-09-26 03:11:30
橡塑技术与装备(2018年14期)2018-07-20 03:21:58
通信电源技术(2016年1期)2016-04-16 04:57:31
中国房地产业(2016年2期)2016-03-01 01:25:32
