六相感应电机的矢量控制研究*
2012-11-21 07:59卢颖娟
电机与控制应用 2012年5期
屈 鲁,谢 卫,卢颖娟
(上海海事大学物流工程学院,上海 200135)
0 引言
六相感应电机调速系统由于具有低压器件实现大功率,转矩脉动减小,系统动、静态特性提高,可靠性提高,转子谐波损耗减小等优势,在电动汽车、船舰推进、航空航天等领域的研究与实践日益增加[1]。由于感应电机是一种典型的非线性、多变量、强耦合的控制对象,所以对其进行高性能控制十分复杂。
在三相感应电机调速系统中应用最多的高性能控制方案是:(1)按转子磁链定向的矢量控制系统;(2)按定子磁链控制的直接转矩控制系统。由于直接转矩控制系统调速范围不够宽,而矢量控制系统具有连续控制平滑和调速范围比较宽的优点,因此矢量控制仍是交流调速系统研究的重要方向之一。目前,矢量控制技术己被广泛应用于高性能感应电机调速系统中[2]。
1 六相感应电机的基本模型
1.1 六相感应电机的物理模型
六相感应电机的转子绕组仍为常见的笼型结构,定子绕组采用两组互差30°电角度的对称三相绕组构成的六相双Y型结构。若将笼型转子绕组也等效为类似的六相双Y型绕组,则六相感应电机的物理模型可用图1表示[3]。
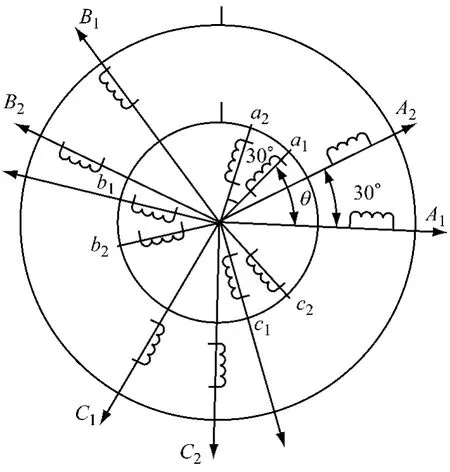
图1 六相感应电机的物理模型
1.2 六相感应电机的数学模型
六相感应电机在三相静止坐标系A-B-C下的数学模型是一个高阶、非线性、强耦合的多变量系统,可以通过坐标变换进行降阶、化简,由此建立六相感应电机在两相同步旋转坐标系d-q下的数学模型。
六相感应电机在两相同步旋转坐标系d-q下的磁链方程为

式中:Lm——d-q坐标系同轴定子与转子等效绕组间互感;
Ls——d-q坐标系定子等效两相绕组自感;
Lr——d-q坐标系转子等效两相绕组自感。
六相感应电机在两相同步旋转坐标系d-q下的电压方程为
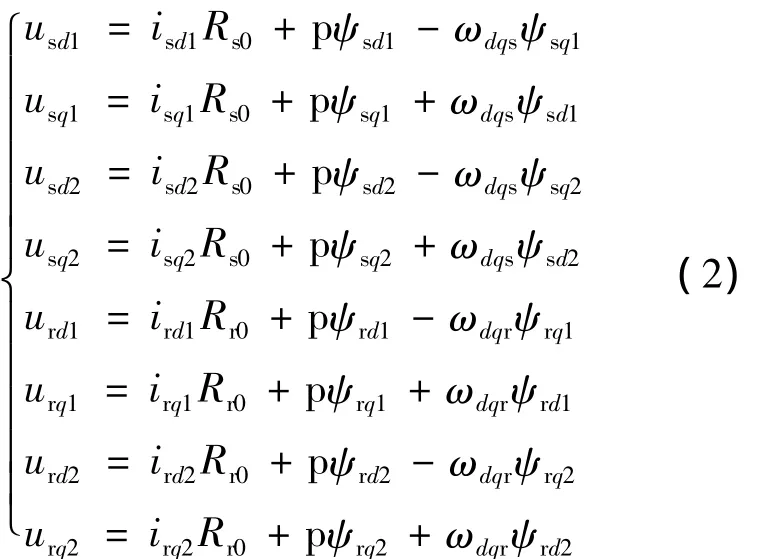
式中:ωdqs——d-q坐标系相对于定子 A1相的角转速;
ωdqr——d-q坐标系相对于转子a1相的角转速。
六相感应电机在两相同步旋转坐标系d-q下的转矩方程为

六相感应电机在两相同步旋转坐标系d-q下的运动方程为

1.3 六相感应电机的矢量控制方程
当采用定子电流、转子磁链及角速度作为状态变量,并按转子磁链定向时,即d轴沿着转子总磁链的方向且 ψrd1=ψrd2=ψr,ψrq1=ψrq2=0,从而可得六相感应电机基于转子磁链定向的矢量控制方程为

2 六相感应电机矢量控制模型
六相感应电机的矢量控制模型主要包括两个部分:定子电流的解耦模型和转子磁链的电流模型。
2.1 定子电流的解耦模型
由电磁转矩公式可知,电磁转矩仅由定子电流转矩分量isq1与isq2产生;由转子磁链公式可知,转子磁链仅由定子电流励磁分量isd1和isd2产生。从这个意义上看,定子电流的转矩分量与励磁分量是解耦的。
根据矢量控制基本方程,可以将六相感应电机的数学模型绘成图2所示的结构形式。由图可以看出,六相感应电机模型被分成ω和ψr两个子系统。
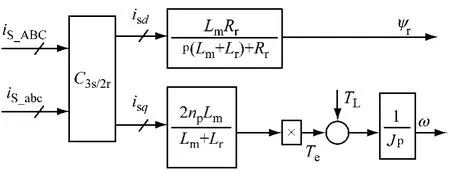
图2 六相感应电机定子电流解耦模型
2.2 转子磁链的电流模型
要实现按转子磁链定向的矢量控制,很关键的因素是要获得转子磁链信号,一般采用间接计算的方法。在计算模型中,由于主要实测信号的不同,转子磁链模型又分为电流模型和电压模型,此处选用电流模型。
图3是转子磁链电流模型的运算框图。六相定子电流经3/2变换,再经同步旋转变换并按转子磁链定向,得到两相同步旋转d-q坐标系上的电流,利用矢量控制方程式(5)可以获得ψr和ωs信号,由ωs与实测转速ω相加得到定子同步频率信号ωdqs,再经积分即为转子磁链的相位角φ,它也就是同步旋转变换的旋转相位角。
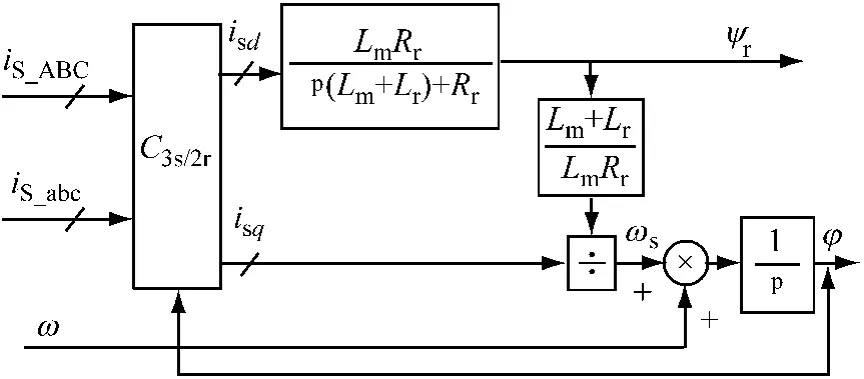
图3 六相感应电机转子磁链的电流模型
3 矢量控制系统调节器的设计
基于转子磁链定向的六相感应电机矢量控制系统,是一种带转矩内环的转速、磁链闭环的矢量控制系统。该系统分为转速控制子系统和磁链控制子系统[4-6]。
3.1 转速控制子系统
转速控制子系统设置了转速调节器ASR,只需要建立转速误差反馈,采用PI调节器,就可以得到如下参考转矩,即

式中,Kp、Ki分别为比例增益和积分增益。转速调节器的输出T*e作为内环转矩调节器ATR的给定值,转矩反馈信号取自转子磁链观测器,其计算值为

只需要建立转矩误差反馈,采用PI调节器,就可以得到如下参考电流,即

设置转矩闭环的目的是,降低或消除两个控制子系统之间的耦合作用;另外,磁链一旦发生变化,相当于转矩内环的一种扰动作用,必将受到转矩闭环的抑制,从而减少磁链突变对转矩的影响。
3.2 磁链控制子系统
磁链控制子系统设置了磁链调节器AΨR,磁链的反馈信号来自转子磁链观测器。只需要建立磁链误差反馈,采用PI调节器,就可以得到如下参考电流,即

设置磁链闭环的目的是,控制转子磁链使其等于给定值,实现恒转矩调速。
综上所述,可以得到六相感应电机按转子磁链定向的矢量控制结构,如图4所示。
4 仿真分析
在MATLAB/Simulink环境下,建立六相感应电机矢量控制仿真系统。其中,六相感应电机的额定数据如下:np=3,f1=50 Hz,Rs=0.22 Ω,Rr=0.47 Ω,Ls=0.039 5 H,Lr=0.039 5 H,Lm=0.036 4 H,J=0.116 N·m2。负载转矩在 0.8 s时刻突变,由0 N·m→15 N·m;在1.4 s时刻突变,由15 N·m→0 N·m。
对建立的控制系统模型进行动态仿真,仿真得到转矩跟踪曲线、转速跟踪曲线和转子磁链跟踪曲线,分别如图5~图7所示。

图4 六相感应电机按转子磁链定向的矢量控制结构图

图5 转矩跟踪曲线

图6 转速跟踪曲线

图7 转子磁链跟踪曲线
从仿真波形可知:六相感应电机的实际转速和转子磁链可以很好地跟踪给定转速n*=1 000 r/min和给定转子磁链
5 结语
本文对六相感应电机按转子磁链定向的矢量控制进行了研究。在此基础上,设计了六相感应电机的转速控制子系统和磁链控制子系统,实现了定子电流的解耦和转子磁链的观测,并在Simulink中进行动态仿真。仿真结果证明了六相感应电机矢量控制系统能很好地跟踪速度、磁链给定,具有较好的动静态响应能力。
[1]庄朝晖,熊有伦,马挺.多相感应电机变频调速系统回顾、现状及展望[J].电气传动,2001(2):3-7.
[2]陈伯时.电力拖动自动控制系统[M].3版.北京:机械工业出版社,2003.
[3]ZHAO Y,LIPO T A.SVPWM control of dual threephase induction machine using vector space de-composition[J].IEEE Transactions on Industry Applications,1995,31(5):1100-1109.
[4]BOJOI R,LAZZARI M,PROFUMO F,et al.Digital field oriented control for dual three phase induction motor drives[J].IEEE Trans Ind App,2002(IA-02):818-815.
[5]KIANINEZHAD R,NAHID M B,BETIN F,et al.Sensorless field-oriented control for six-phase induction machines[J].IEEE Trans Ind App,2005(IAS-05):999-1006.
[6]BOJOI R,GRIVA G,PROFUMO F.Field oriented control of dual three-phase induction motor drives using a luenberger flux observer[J].IEEE Trans Ind App,2006(IA-06):1253-1260.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
防爆电机(2021年1期)2021-03-29
测控技术(2018年2期)2018-12-09
现代防御技术(2016年1期)2016-06-01
电测与仪表(2016年10期)2016-04-12
新高考·高一物理(2016年1期)2016-03-05
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电机与控制应用(2015年10期)2015-03-01
电测与仪表(2014年23期)2014-04-04