基于三维激光扫描技术的矿山地形快速测量的关键技术研究
2012-11-14 10:52:24刘昌军叶长锋解家毕
测绘通报 2012年6期
刘昌军,赵 雨,叶长锋,解家毕
(1.中国水利水电科学研究院,北京100038;2.国核电力规划设计研究院,北京100094)
基于三维激光扫描技术的矿山地形快速测量的关键技术研究
刘昌军1,赵 雨2,叶长锋2,解家毕1
(1.中国水利水电科学研究院,北京100038;2.国核电力规划设计研究院,北京100094)
介绍利用三维激光测量技术进行矿山复杂地形测量的流程与方法,提出基于网格分块的激光点云数据非地面点的快速过滤方法,并详细介绍移动最小二乘法拟合地形表面的DEM方法和采用三次B样条曲线拟合地形等高线方法等关键技术。在此基础上,利用IDL语言编制基于激光点云数据的矿山测量快速出图软件LIDARVIEW。该软件具有激光点云快速处理(包括点云删除、过滤、合并和抽稀等)、地物快速绘制、DEM和等高线生成等功能。最后以实例说明如何利用三维激光扫描仪和LIDARVIEW软件实现矿山地形的快速测量与绘制,以得到矿山数字地形图、DEM数据和等高线等成果。
三维激光扫描;矿山;移动最小二乘法;三次B样条拟合;DEM;等高线
一、引 言
对于矿山的复杂地形,采用全站仪和GPS等传统的测量手段进行高精度测绘工作往往费时费力。近年来快速发展的三维激光扫描技术为解决复杂矿山地形测量提供了新的技术手段[1-7]。但对于获取的地形的大量高精度点云数据,如何快速进行数据处理和地形图绘制是亟须解决的问题。笔者在多年应用激光测量的基础上,针对矿山测量的特点和难点,研究了应用激光扫描技术进行矿山测量的一整套流程与方法,其工作流程分为野外数据采集、数据处理和地形图绘制等。对于野外数据采集,介绍了三维激光扫描和GPS的联合应用;数据处理部分主要包括多站激光点云的坐标转换和拼接、大量激光点云数据的非地面点的过滤问题[4]、海量激光点云的快速构网[6]、DEM数据的生成[8]和等高线的绘制等[7];地形图绘图部分主要包括地物快速绘制、不同比例尺成图等。
基于以上流程与方法,本文采用交互式数据语言(interactive date language,IDL)编制了基于海量激光点云数据的矿山测量绘图软件LIDARVIEW[4]。该软件实现了非地面点的自动过滤、复杂点云的快速构网和地形图绘制等功能。
以石家庄某矿山的地形测量为例,本文采用三维激光扫描仪和高精度GPS系统获取了该矿山的多站点的三维激光点云数据,且将点云数据拼接并转换成坐标,利用LIDARVIEW软件得到了该矿山地表数字地形图、DEM数据和等高线等成果。
二、三维激光测量的关键技术
1.三维激光测量的技术原理
三维激光测量因其获取的三维坐标数据信息量大、数据精度高、扫描速度快,近年来得到了快速发展,且被应用在各行各业。本研究所使用的是Riegl公司的远距离三维激光扫描仪LMS-420I。该扫描系统包含一台快速准确的激光测距仪和一组可以引导激光以等角速度扫描的反射棱镜。激光测距仪可以主动发射激光,并且同时接收“目标”反射信号进行测距。针对每一个扫描点可以测得测站到扫描点的斜距,配合扫描的水平垂直方向角,可以推得扫描点与测站之间的三维空间相对坐标差,若测站的三维坐标已知,则可以求得每个扫描点的三维坐标。
该激光扫描仪的有效扫描距离最大可达1000 m,最小扫描范围为2 m,最远距离测量精度为±10 mm (单点),平均测量精度为±5 mm,水平扫描范围为0~360°,垂直扫描范围为0~80°,激光等级为1级。
2.激光点云数据的坐标转换与拼接
三维激光测量获取的点云数据是相对于仪器本身的坐标数据。在利用激光点云数据进行地形图绘制时,需要转换成大地坐标。利用GPS和三维激光扫描仪可以实现对激光扫描系统的相对坐标的任意转换。其测量原理如下:利用GPS快速获取现场布置的圆形反射片中心点的空间坐标,同时利用地面激光扫描仪获取圆形反射片中心点相对坐标,通过反射片中心点的公共坐标可实现激光扫描数据相对坐标的任意转换[3-4]。该方法更适合于地形测量,测量速度会大大提高,拼接精度也会大大提高。
3.非地面点快速过滤技术
对于获取的大量激光点云,如何快速获取准确的地面点数据,是进行挖填方计算的难点之一。为解决该问题,本文提出了基于最小二乘法拟合地表的激光点云非地面点快速过滤算法。
将海量激光点云分块并建立相应的空间索引关系后,进行非地面点的自动过滤处理。滤波要考虑存在点的网格,并对其进行计算,每次计算的结果再以索引的方式动态存储,作为下次迭代计算的基础数据。具体滤波流程如图1所示。
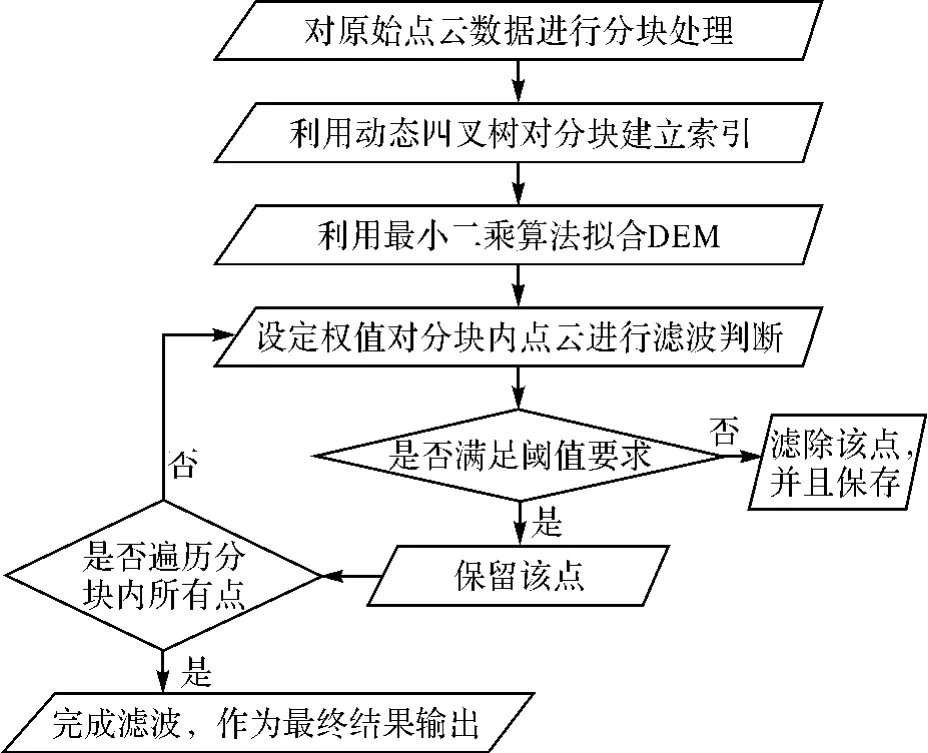
图1 点云滤波处理流程图
4.移动最小二乘法拟合DEM
为精确得到地表的DEM数据,对每个分块激光点云数据使用最小二乘法拟合DEM[8-10],它提供了一种较高次数的多项式逼近方式。该算法拟合DEM比较平滑,与实际地形接近,基于网格分块的最小二乘拟合函数为

式中,i为所分块的编号;α(x)=[a1(x) a2(x)… an(x)]为待求系数,是坐标x的函数;p(x)=[p1(x) p2(x) … pn(x)]称为基函数,它是一个k阶完备的多项式;n是基函数的项数。
对于m维基函数p(x),形函数为
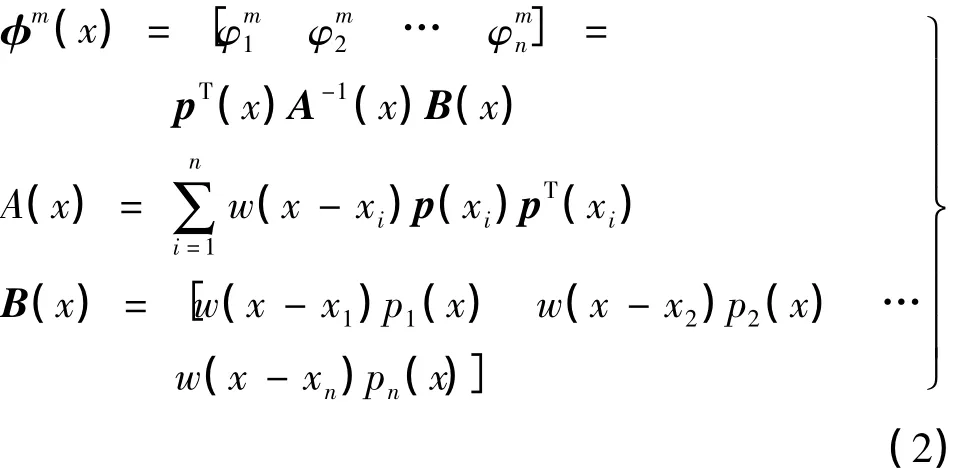
将式(2)带入式(1),就可以得到移动最小二乘拟合函数

式中,φm(x)为形函数;m表示基函数的阶数;yT=[y1y2… yn]。
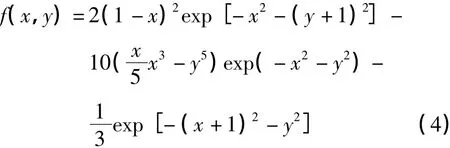
对于DEM的拟合,可以使用函数
5.三次B样条拟合等高线
对于扫描获取的激光点云数据,采用三次B样条在已知的离散的坐标之间进行插值。三次B样条的参数方程如下

式中,Bj,3(u)为三次均匀B样条基函数;vi+j为已知多项式函数。
三、研究流程及软件开发
1.研究流程
基于激光扫描技术的矿山地形快速测量主要包括野外测量、资料整理和绘制成图3个步骤。其中,野外测量部分包括激光扫描、布设反射片和GPS测量等;资料整理包括坐标转换、激光点云的非地面点过滤和DEM构建等;绘制成图包括绘制地形等高线和地物等。其主要工作流程如图2所示。
2.软件开发
为解决激光点云数据的快速处理和地形图快速绘制,利用IDL编制了三维可视化基于海量激光点云数据的矿山地形处理软件LIDAEVIEW[11],其软件界面如图3所示。IDL是面向矩阵、语法简单的第四代可视化语言,可以应用于任何领域的三维数据可视化、数值计算、三维图形建模、科学数据读取等功能中。IDL是完全面向矩阵的,因此具有快速分析超大规模数据的能力,这在海量点云处理方面具有独特的优势[12]。
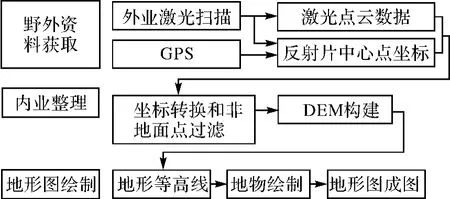
图2 研究流程图
LIDAEVIEW[11]软件主要包括激光点云处理模块、地表模块、等高线和地物绘制模块、制图输出模块等。其中,激光点云处理模块具有点云删除、合并、植被过滤、抽稀等功能;地表模块主要有生成地表DEM数据和等高线功能;等高线和地物绘制模块主要有绘制地形等高线及各种地物的快速绘制等功能;制图输出模块主要用于输出各种比例尺地形图。此外,针对一些工程的复杂挖填方计算,该软件还提供了基于激光点云数据的任意边界的挖填方计算模块。
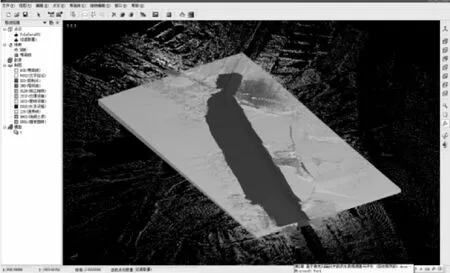
图3 LIDARVIEW软件界面
四、石家庄某矿山地形的快速测量
1.野外资料获取
石家庄某矿山总面积约8 km2,其中矿坑区域面积约6 km2。该矿山为人为采石场,矿山面积大,地形复杂,少植被。
利用Riegl公司的地面三维激光扫描仪LMS-420I和高精度GPS设备对该矿山进行了激光测量。野外工作人员2人,现场工作时间2 d,扫描面积8 km2。野外共测量扫描19站,获取精度为5 cm的三维激光点云坐标30万个。在单站测量时,同时布置5个反射片,并采用高精度GPS获取了90个反射片中心点大地坐标。图4为拼接后的三维激光点云数据。
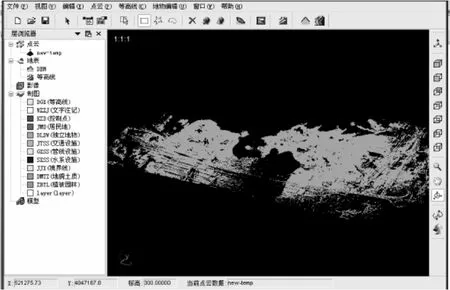
图4 扫描后获取的三维激光点云数据
2.数据整理及地形图绘制
将扫描获取的激光点云数据导入LIDARVIEW软件,利用该软件依次完成坐标转换和多站拼接后,将非地面点数据过滤获得地表数据、进而快速生成该矿山的DEM数据、地形等高线等。室内数据处理和地形图绘制时间约1 h。
图5为该矿山地表的激光点云数据,图6为采用移动最小二乘法拟合得到的地表DEM数据,图7为采用3次B样条拟合插值得到该矿山的地形等高线。
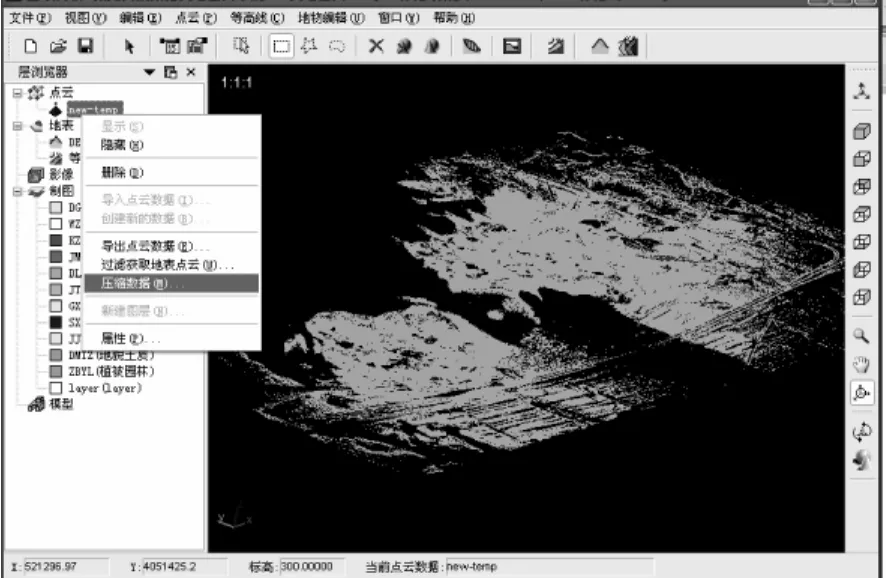
图5 过滤非地面点后的地表激光点云
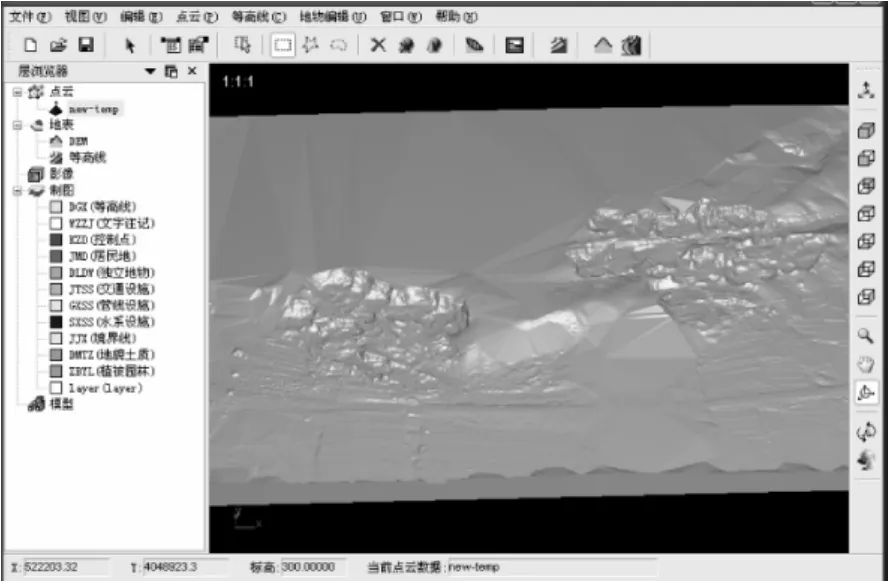
图6 拟合得到的DEM数据
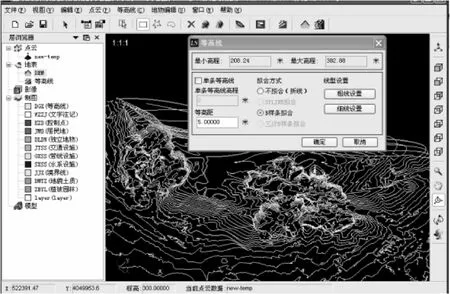
图7 扫描区域的地形等高线
五、结束语
本文详细介绍了利用激光扫描技术进行矿山复杂地形测量的流程与方法,提出了非地面点云数据的自动过滤方法、采用移动最小二乘法拟合地表DEM的方法和B样条曲线插值拟合等高线方法等。基于矿山测量和激光点云数据处理的难点,编制了基于激光扫描数据的矿山测量绘制软件LIDARVIEW,并利用该软件基于激光点云数据得到了石家庄某矿山的地形图、等高线和DEM数据等成果。
[1] 范海英,杨伦,邢志辉,等.Cyra三维激光扫描系统的工程应用研究[J].矿山测量,2004(3):16-18.
[2] 毛芳儒,王磊.三维激光扫描技术[J].宇航计测技术,2005,25(2):1-6.
[3] 刘昌军,高立东,丁留谦,等.应用激光扫描技术进行岩体结构面的半自动统计研究[J].水文地质工程地质,2011,38(2):52-57.
[4] 刘昌军,丁留谦,孙东亚.三星堆月亮湾城墙遗址覆土方量计算[J].水利水电科技进展,2011,31(2):81-84.
[5] 马立广.地面三维激光扫描仪的分类与应用[J].地理空间信息,2005,3(3):60-62.
[6] 刘昌军,丁留谦,孙东亚.基于激光数据的岩体结构面全自动模糊群聚分析及几何信息获取[J].岩石力学与工程学报,2011,30(2):358-365.
[7] 刘昌军,丁留谦,孙东亚.三维激光测量技术在复杂挖填方工程计算中应用[C]∥全国第一届激光雷达对地观测高级研讨会论文集.北京:[s.n.],2010:114-119.
[8] LANCASTER P,SALKAUSKAS K.Surfaces Generated by Moving Least Squares Methods[J].Mathematics of Computation,1981,37(155):141-158.
[9] BELYTSCHKO T,LU Y Y,GU L.Elements-free Galerkin Methods[J].International Journal for Numerical Methods in Engineering,1994(37):229-256.
[10] LEVIN D.The Approximation Power of Moving Leastsquares[J].Mathematics of Computation,1998,67 (224):1517-1531.
Study of the Key Technologies for Mine Rapid Topographic Survey Based on 3D Laser Measurement
LIU Changjun,ZHAO Yu,YE Changfeng,XIE Jiabi
0494-0911(2012)06-0043-04
P217
B
2011-06-13
国家国际科技合作计划资助(2010DFA74520);“十一五”国家科技支撑计划项目(2008bab42b05,2008BAB42B06)
刘昌军(1978—),男,山东郓城人,博士生,工程师,主要从事地面激光测量方面的研究工作。
猜你喜欢
疯狂英语·新悦读(2023年9期)2023-12-02 17:36:34
安徽师范大学学报(自然科学版)(2022年3期)2022-07-14 03:54:42
广东教学报·教育综合(2019年87期)2019-09-10 07:22:44
测绘通报(2019年1期)2019-02-15 04:56:06
童话世界(2018年17期)2018-07-30 01:52:02
制造技术与机床(2017年7期)2018-01-19 02:30:00
软件(2017年6期)2017-09-23 20:56:27
计算机测量与控制(2017年6期)2017-07-01 16:24:14
地理教育(2016年10期)2016-11-09 00:32:53
中国卫生(2014年9期)2014-11-12 13:02:00