基于GIS的机场噪声预测技术研究
2012-11-14 10:52:30尚雪莉刘中一
测绘通报 2012年6期
薛 涛,尚雪莉,刘中一
(1.宁波市测绘设计研究院,浙江宁波3150421;2.核工业航测遥感中心,河北石家庄050002;3.中国民航机场建设总公司,北京100029)
基于GIS的机场噪声预测技术研究
薛 涛1,尚雪莉2,刘中一3
(1.宁波市测绘设计研究院,浙江宁波3150421;2.核工业航测遥感中心,河北石家庄050002;3.中国民航机场建设总公司,北京100029)
针对现代机场噪声预测评价的需求,参考国内外关于机场噪声预测、评价、监测、分析等各个方面的法律法规、技术参考与研究实践成果,对机场噪声预测模型的精确性及其易于实现性进行深入分析。在提出理论模型的基础上,遵循模型驱动架构(MDA)理论的3个建模过程和7个具体流程进行需求分析与系统设计,利用MFC与MapX组件实现了轻量级的基于GIS的机场噪声预测系统。
GIS;机场规划;机场噪声;噪声等值线;预测
一、引 言
随着我国航空事业的发展和人们环保意识的增强,控制机场噪声、减少机场噪声影响的课题显得越发重要和紧迫。而为了从根本上减轻机场噪声带来的危害,摆脱“先污染后治理”的被动局面,机场噪声预测评估已经成为决策者、规划设计者进行决策和规划的重要依据和手段,也是未来发展的趋势。本文研究噪声预测模型,并在此基础上建立一个基于GIS平台的噪声预测系统。
二、机场噪声预测计算模型的建立
一般来说,各种机场噪声预测模型的计算结果都是通过在机场地图的跑道周围做等值线,以及计算跑道周围某些敏感点的噪声级表现的。等值线图用来反映机场周围受飞机噪声影响的程度和大小[1],这些影响由一个具体的噪声指标表示,等值线就是这个噪声指标值相等的一条线。绘制机场周围的等值线图是控制机场噪声的基础,也是机场噪声预测结果的直观体现。图1是生成噪声等值线的一般流程。下面以单跑道为例,说明噪声等值线的计算方法。
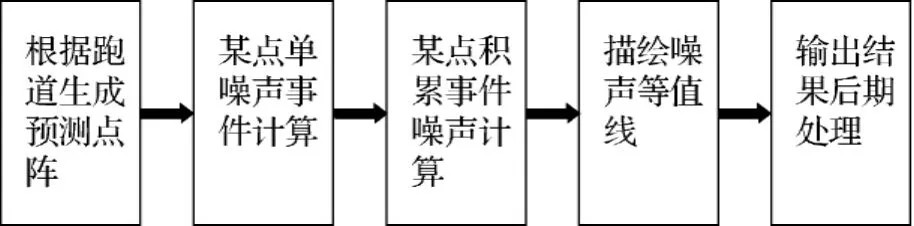
图1 计算机场噪声等值线的流程图
1.单跑道预测点阵生成
计算噪声等值线至少需计算2000~6000个观测点的噪声数据,然后将噪声级相同的点通过曲线拟合后得到噪声等值线。观测点的数目越多,等值线的精度越高。由此,最后生成的等值线精度高低,与预测点阵的生成恰当与否有着重要的关系,需要根据机场噪声的特点对以往机场噪声预测、测量结果进行分析。对于单跑道的噪声预测分析而言,其预测点阵分布在一个以跑道方向、位置和长度决定的矩形M中,M的中心即为跑道的中线中点,矩形M的示意图如图2所示。
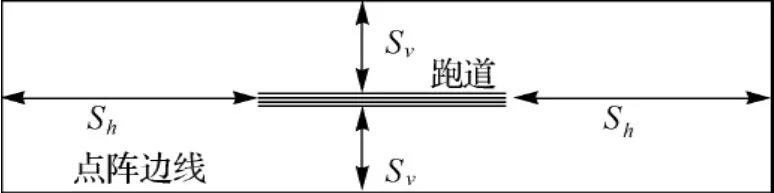
图2 生成预测点阵边缘矩形M的示意图
依照以往的统计数据结果分析,如果要将噪声值n>70 dB的等值线完整描绘,需要取 Sh为8000~12 000 m,Sv取1500~2500 m为宜。
在确定了矩形M之后,以往确定预测点的做法是等距平均法,如图3所示。
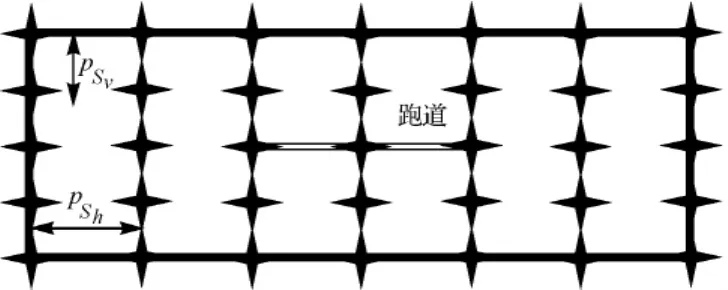
图3 等距平均法生成预测点阵方法的示意图
pSh和pSv的取值决定了描绘等值线时插值法的精度。pSh和pSv越小,预测点的数量就越多,插值法获得的等值点坐标精度就越高,计算量也就越大。一般实践中取 pSh在20~400 m之间,pSh在10~200 m之间。
整个预测点阵的数量Cm有以下公式

式中,Lroad为当前跑道长度。
实践证明,随着需要描画等值线的噪声值n减小,Sh与Sv将急速增大。而为了得到精确的等值点插值坐标,pSh和pSv取的很小。这样得到的Cm会很大,而Cm中每一个点都需要计算持续积累时间有效感觉噪声级,导致整个预测过程的计算量十分庞大。
在实际工作中,对于预测结果中离机场跑道较近、噪声值较高(如n可能>70 dB)区域的精度要求和关注程度要大于离跑道较远、噪声值比较低(如n可能≤70 dB)区域。基于此状况,提出一种新的预测点阵生成方法,旨在解决在高精度、大范围的预测过程中由于Cm巨大而导致计算量过于庞大的问题。
这种生成方法的思想是:由于机场噪声有一定的规律可循,遵从实践经验,在离跑道远、预计预测噪声值较低的区域,建立稀疏的预测点阵;而在离跑道近、预计预测噪声较高的区域,建立密集的预测点阵。具体方法如图4所示。
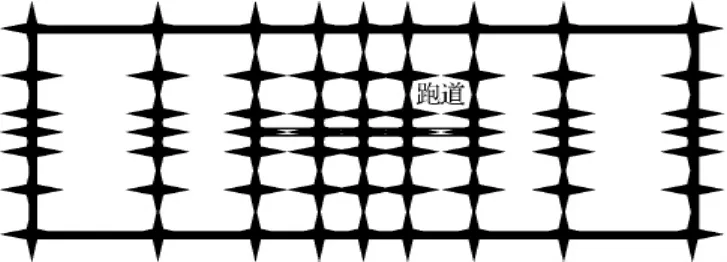
图4 不同密集度生成预测点阵方法的示意图
可以设定不同的pShmax、pShmin、pSvmax、pSvmin,令所有pSh值都在[pShmin,pShmax]中,所有的 pSv值都在[pSvmax,pSvmax],并以此作为动态调整控制点阵疏密程度的手段。这样,点阵的疏密与其重要程度、离预计高预测噪声值区域的距离相关,兼顾了精度、范围和计算量3个方面。
2.单事件噪声预测计算
单次噪声计算的目标是获得单架飞机一次飞行给预测点阵中某点Pij带来的影响——有效感觉噪声级LEPN。LEPN的计算受到诸多因素的影响,这些因素包括[2]:航空器型号、发动机型号、发动机推力、航空器飞行中(起飞或着陆)各阶段速度、地面位置点到航空器航迹的最短距离,以及当地的地形和气候对声音衰减的影响等。所以,LEPN的计算就是根据地面噪声计算位置点到航空器飞行线路的最短距离,对该航空器既有基本声学数据进行插值计算得到该位置点的噪声级,并在此基础上叠加以上各影响因素的修正值。
[2]和[3]给出了计算声音暴露级(SEL)的模型,国内也有学者提出了用于机场航空噪声评价指标的计算公式[4],综合以上资料,得出单架次飞行事件有效感觉噪声级LEPN的一般计算模型
LEPN=LEPN(P,d)+Δv-Λ(β,L)+ΔL+Δφ+Δl(φ)式中,LEPN(P,d)为理想状态下的单架飞机单次飞行有效感觉噪声值;Δv为速度修正因子;Λ(β,l)为侧向衰减修正因子;ΔL为起飞滑跑方向修正因子;Δφ为持续时间修正因子;Δl(φ)为发动机安装修正因子。
3.积累事件噪声预测计算
多次飞行事件对某预测点P造成的影响采用计权等效连续感觉噪声级LWECPN来计量,这也是我国现行的机场噪声值评价量。

式中,N为某机型飞机飞行事件发生的次数,N=N1+N2+N3;LEPNi为某机型飞机单次飞行次数产生的经过修正的有效感觉噪声级。
4.基于预测点阵的等值线描绘
根据文中的方法计算出预测点阵中所有点LWECPN的值后,对于某个给定的标准值LWECPN(std),就可以确定分布在点阵“网格”上的所有 LWECPN为LWECPN(std)的坐标,进而描绘值为LWECPN(std)的等值线。
三、系统设计与实现
1.系统体系结构
本系统利用MFC的MVC控制,将整个系统的结构分为用户层、业务层、数据层3部分。这种架构强制性地使系统的输入、处理和输出分开,具有低耦合、高复用、可适应、可维护的优点。
在用户层中,系统利用MFC的消息响应机制接受用户输入,送入业务层进行处理。业务层经过一系列计算,得到最后的结果,再由用户层中的视图类反映给用户,完成人机交互。
整个业务层是根据业务流程对用户的输入以及底层数据进行分析计算的过程,也是系统实现的重点和难点。业务层一共分为4个模块,分别是GIS模块、I/O处理模块、核心计算模块和外围计算模块。上述4个模块的主要功能如下:
1)GIS模块负责与GIS有关的各种基本操作,以及对地理信息数据的处理和分析。
2)I/O处理模块主要用来接收来自用户层的参数信息与来自数据层的数据信息,并负责将最终的计算结果传递给数据层进行持久化。
3)核心计算模块主要实现预测模型中的多跑道多事件的噪声预测核心算法。
4)外围计算模块主要负责机型噪声曲线拟合、预测点阵生成、根据计算结果确定等值点以及根据等值点确定等值线等工作。
对于数据层来说,主要的功能是获取地图、飞机性能参数及其他数据,以供给业务层进行处理,并将处理的结果持久化到地图数据中。
2.系统实现
本系统用MFC+MapX组件搭建,MFC提供了很好的模型视图控制器(model view controller,MVC)控制,而MapX则提供了友好便捷的地图管理接口。依赖于PIM建模过程生成的文件,将MFC与MapX的优点相结合,运用模式设计提供的先进设计方法来构建ANPS系统。
3.系统应用
本系统是面向机场规划设计人员建立的、轻量级的机场航空噪声预测软件。本系统旨在减轻用户在机场跑道周边区域进行土地相容性研究时的工作量,辅助用户便捷地使用CAD生成的前期规划图进行机场航空噪声预测与评估。系统的主要功能包括:
1)读取、显示机场规划地图,对地图进行放大、缩小、选定、平移、设置标签、设置标注、图层管理等基本操作。
2)通过输入的限定条件,自动查找与定位地图中的跑道图元。
3)根据输入的样本噪声值组,进行某种机型的飞机噪声参数曲线拟合。
4)根据输入的参数,进行噪声预测计算。
5)根据计算结果画出等值线,并生成主题地图,结果可存储为图层。
6)计算指定敏感点的预测噪声值。
7)对跑道的位置和方向进行动态调整。
8)飞机机型参数使用XML存储。
四、结束语
笔者参考了国内外大量法律法规、技术参考与研究实践成果,对机场噪声预测模型的原理、计算过程、精确性与易于实现性进行了深入研究分析,并在其他学者的研究基础之上建立了机场噪声预测模型,其中在单/多跑道预测点阵的生成、飞机噪声曲线模拟、修正因子计算、等值点坐标确定、等值线追踪等具体方面的理论研究中提出了改良与创新。在此模型基础上结合实际工作中遇到的具体问题,很好地考虑了规划人员的实际需求,充分发挥GIS平台的优势,实现了一个基于GIS的机场噪声预测系统。
参考文献:
[1] 闫国华,孙卫涛,诸葛昌炜.基于ANP数据库的飞机起飞剖面航迹的计算研究[J].航空维修与工程,2011 (7):48-51.
[2] 吴新泉.机场飞机噪声评价与防治[J].江苏航空,2001 (2):13-14.
[3] 武汉英.飞机噪声预测模型及其应用[D].天津:中国民航大学,2008.
[4] 赵仁兴,沈洪艳,刘劲松,等.机场噪声预测与计算[J].河北工业科技,2000(1):24-27.
On Airport Noise Prediction Technique Based on GIS
XUE Tao,SHANG Xueli,LIU Zhongyi
0494-0911(2012)06-0071-03
P208
B
2012-05-04
薛 涛(1972—),男,宁夏吴忠人,硕士,高级工程师,主要从事GIS软件开发工作。
猜你喜欢
环球时报(2023-02-28)2023-02-28 17:16:37
矿山测量(2020年6期)2021-01-07 04:52:06
数学年刊A辑(中文版)(2020年3期)2020-10-27 02:44:16
铁道通信信号(2020年3期)2020-09-21 09:13:04
新高考(英语进阶)(2017年11期)2018-01-22 03:02:42
中学生数理化·八年级物理人教版(2017年9期)2017-12-20 08:11:30
地理教学(2016年19期)2016-11-21 05:01:49
创新作文(小学版)(2016年31期)2016-03-11 19:08:09
九江学院学报(自然科学版)(2015年1期)2015-11-12 03:33:39
黑龙江水利科技(2015年5期)2015-03-18 03:20:14