基于快速成型技术的点云压缩算法研究
2012-11-14 10:52:32万程辉程效军贾东峰
测绘通报 2012年6期
万程辉,程效军,贾东峰
(1.同济大学测量与国土信息工程系,上海200092;2.南昌工程学院水利与环境工程学院,江西南昌330099)
基于快速成型技术的点云压缩算法研究
万程辉1,2,程效军1,贾东峰1
(1.同济大学测量与国土信息工程系,上海200092;2.南昌工程学院水利与环境工程学院,江西南昌330099)
研究一种两次分层压缩点云数据的方法,将等高距和其允许误差设为阈值压缩数据。试验证明,通过设置适当的切片厚度,该方法数据压缩率大、算法执行效率高、特征保持较好、三维模型表面光滑,具有良好的应用价值。
快速成型技术;切片厚度;压缩率;三维模型
一、引 言
在逆向工程和快速成型技术中,海量散乱点云的特征提取较为复杂和困难。基于点云数据的特征提取主要有以下方式:① 点云数据建立网格模型,在三角面片上提取特征点和特征线等[1-3],其优点是算法成熟,但从总体建模来讲,计算时间较长,且三角面片建立有一些缺陷;②从点云直接提取特征点,主要通过法矢或平面截取等方式获取特征线、轮廓线和骨架线等[4-8],特点是算法相对复杂,但计算时间较长;③由于前两种算法计算时间都较长,可对海量点云数据先进行压缩,再对特征线进行提取,这样可节省计算时间[9-10]。
本文提出一种两次分层提取数据的方法,即一种微小切片方法,用于提取特定方向的点云数据,对海量数据压缩时可提高计算速度,且能较好地保留特征。
二、点云数据压缩算法
1.点云压缩的算法
点云压缩的算法很多,不同类型的点云数据可以采取相应的压缩方法。常用的算法有:最小距离法、均匀网格采样法、平均距离压缩算法、八叉树压缩算法等。这些算法对海量点云数据的压缩主要考虑3个方面:①压缩量;②数据的曲率特征保留;③算法执行效率。这些算法存在的问题是:执行效率高、压缩量大的算法,往往特征保留少,如最小距离法、均匀采样法等;考虑曲率特征保留,算法相对复杂,计算执行效率低,如八叉树、自适应曲率等压缩算法。本文通过基于快速成型技术方法,对数据进行分层,在每层中提取一定厚度的数据,切片厚度在点云之间距离范围时,提取距离小于该厚度的数据,以达到压缩数据的效果,并能较好地保留物体轮廓特征,且算法执行效率高,压缩率大。
2.快速成型技术原理
快速成型技术原理是“分层制造,逐层叠加”,快速建立模型。根据模具的形状,每次做成一个具有一定微小厚度和特定形状的截面,称为切片,再把切片逐层粘结起来得到立体的模具[11]。三维激光扫描得到的点云数据具有海量、散乱、线性扫描和三维算法复杂等特点,将点云数据根据物体的特征方向,进行切片提取数据,投影到平面上获取物体的特征线[12]。为了生成等高线,点云数据用了分层平面投影的方法[5],将Z+1和Z层之间的数据平面投影到高程平面Z上,如图1所示。从图1得知,分层的宽度会影响点云数据的提取。宽度过大时,点云投影过密,形成平面上的点云带,不利于提取等高线特征,在等高线的特征细节上有差异;宽度小时,点云产生断裂,形成不连续的数据,造成等高线的特征丢失。

图1 分层提取的点云
三、基于快速成型技术的压缩算法
1.点云切片的生成
根据快速成型技术,本文提出利用微小切片来提取点云进行数据压缩的方法,以克服分层剖切造成的点云数据不均匀问题,从而控制分层的厚度,避免分层过厚或过薄,同时舍去特征线提取时的冗余数据。
点云数据经过预处理后,得到以高程方向为序的点云数据。为了快速提取所需点云数据,对其进行两次分层。
第一次分层,算出坐标范围为(Xmin,Ymin,Zmin)~(Xmax,Ymax,Zmax),生成最小包围盒,如图2(a)所示。按Z方向高度H和等高距h,进行第一次分层,每一层大小为(Xmax-Xmin,Ymax-Ymin,h),每层的Z坐标范围为(Z,Z+h),将符合要求的数据存入每层矩形包围盒中,如图2(b)所示。
第二次分层,在第一次分层包围盒内的数据中,提取等高线上下允许厚度的点云数据,形成一条微小切片,带宽大小为等高线的容许误差Δ,微小带状包围盒的大小为(Xmax-Xmin,Ymax- Ymin,Z± Δ),将符合要求的数据存入每层的微小切片中,如图2(c)所示。

图2 点云数据的分层切片
2.切片厚度设置
点云数据提取数据宽度设置在属性允许误差Δ内。这是一个关键阈值,提取的点云数据宽度与点云数据的分布密度有关,而点云数据分布密度与扫描密度设置和扫描对象的远近相关。为了便于调节,在算法中设置范围为等高距大小的 1/10~1/20,如图3所示。如等高线在数字地形测量中的容许误差为等高距的1/15,若等高距为0.5 m时,提取的范围为Z±(0.5×1/15)的高程厚度,根据大比例尺地形图机助制图规范,图根点高程中误差不大于等高距的1/10,满足等高线精度要求[13]。微小切片的宽度由等高距和设定的阈值两个值组成。
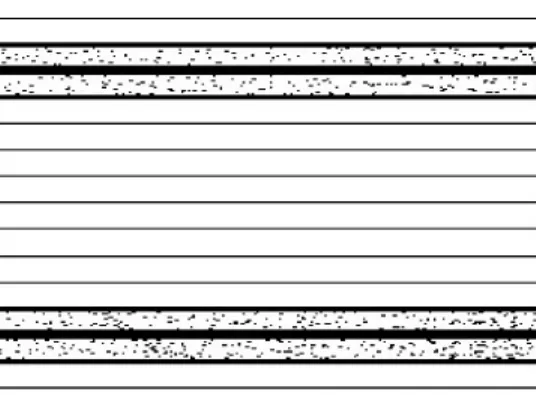
图3 等高距与阈值设置
3.算法流程
两次分层压缩数据的算法流程图如图4所示。
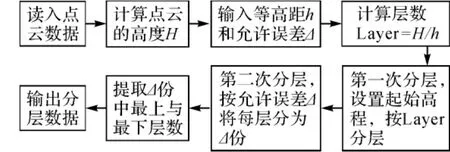
图4 算法流程图
四、实例分析
本文选取典型的点云数据,用Visual C++6.0在PC上编程实现和验证本文算法。以三维激光扫描仪扫描的华佗雕像为例,扫描的海量点云数据总数为708 987个,整个雕像的高度为3.239 5 m。为观察效果,截取雕像头部数据,图5为不同等高距获取的压缩点云数据,图6为不同等高距的建模效果。
1)利用快速成型技术压缩点云数据,两次分层可以选取等高距h与允许误差Δ的大小灵活改变切片厚度。为了比较压缩效果,固定选取1/15阈值计算切片厚度,如图5所示,不同的等高距压缩数据,等高距与阈值的乘积使切片厚度不同,比较可知,特征保留也不同。

图5 微小分层切片对点云的压缩
从图5可以看出适当的切片厚度能保持较好的特征,如0.002 m与0.005 m的等高距,压缩数据均匀,保持较好的轮廓特征。0.001 m的等高距压缩数据过大,特征损失也大。0.01 m与0.02 m的等高距过大,数据抽取间隔过大,数据特征损失大。
2)利用Geomagic软件对压缩数据进行建模。记录建模时间,建模耗时如表1所示,阈值为等高距1/15的压缩数据与全部数据比较,压缩率达到85%以上,压缩数据建模耗时少74 s。建模效果如图6所示。

图6 利用Geomagic建模比较
图5(a)为用全部数据所建模型,细节详细但数据冗余,三角面片建模复杂,耗时长,且模型不光滑,表面粗糙。
图5(c)为0.002 m等高距压缩数据,建模速度快,特征保持良好,模型光滑,具有较好的模型效果。
图5(b)至图5(e)压缩数据量稍少,建模效果次之;图5(f)等高距过大,建模特征效果较差。
3)图4压缩数据与图5建模效果得到的微小切片的厚度是压缩的关键因素。
当等高距过大时,如图5(f),分层切片中数据提取厚度变大,压缩厚度也过大,物体的特征损失较多,建模效果差,需要调节阈值,如变大1/10,切片压缩厚度变小,使点云数据更好地保留特征。
图5(c)为0.002 m等高距,分层与压缩间距适当,压缩数据均匀,较好地保留了特征,本实例设置0.002 m等高距和1/15的允许误差是压缩数据的合适阈值。
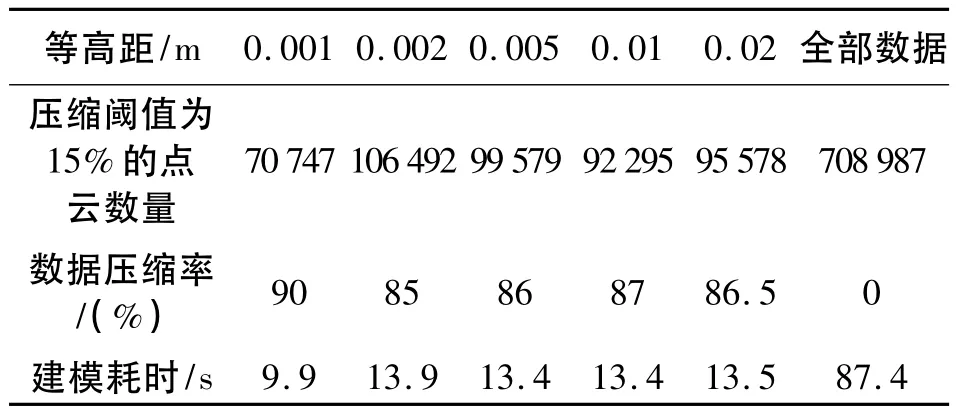
表1 点云数据压缩率
五、结束语
快速成型技术主要应用在模型的分层建模叠加成型方面,利用两次分层来压缩点云数据,设定等高距与切片厚度阈值来压缩数据。通过不同的等高距,得到不同的压缩数据,对数据压缩率、建模时间和建模效果进行了比较,可知设置适当的等高距和分层阈值,可使压缩数据保持良好的特征,压缩数据率大,且算法简单,执行效率高。利用快速成型技术对点云数据进行压缩,可较好地保留整个特征,对分层提取物体的特征具有良好的应用价值。
[1] 任自珍,岑敏仪,张同刚,等.基于等高线形状分析的LiDAR建筑物提取[J].西南交通大学学报,2009,44(1):83-88.
[2] 姜琳琳,赵晓明,洪波.LiDAR数据结合特征线获取高精度DEM及DOM[J].黑龙江工程学院学报:自然科学版,2009,23(2):33-35.
[3] KILIAN J,HAALA N,ENGLICH M.Capture and Evaluation of Airborne Laser scanner Data[C]∥International Archives of Photogrammetry and Remote Sensing.Vienna:[s.n.],1996.
[4] 王亚美,赵萍.一种基于点云数据的直接分层算法[J].沈阳理工大学学报,2009,28(3):39-41.
[5] 吴杭彬,刘春.激光扫描数据的等值线分层提取和多细节表达[J].同济大学学报:自然科学版,2009,37(2):267-271.
[6] VERROUST A,LAZARUS F.Extracting Skeletal Curves from 3D Scattered Data[C]∥Shape Modeling International’99.Aizu Wakamatsu:[s.n.],1999.
[7] RIANMORA S,KOOMSAP P,HAI D P V.Selective Data Acquisition for Direct Integration of Reverse Engineering and Rapid Prototyping[J].Virtual and Physical Prototyping,2009,4(4):227-239.
[8] KUMBHAR V K,PANDEY P M,RAO P V M.Improved Intermediate Point Curve Model for Integrating Reverse Engineering and Rapid Prototyping[J].Int J Adv Manuf Technol,2008(37):553-562.
[9] 刘春,陆春.三维激光扫描数据的压缩与地形采样[J].遥感信息,2005,2(2):96-102.
[10] 徐景中,万幼川,张圣望.LiDAR地面点云的简化方法研究[J].测绘信息与工程,2008,33(1):32-34.
[11] 焦向东,佟泽民.分层制造法的材料技术及其发展[J].中国机械工程,2000,11(5):582-584.
[12] 王亚美,赵萍.一种基于点云数据的直接分层算法[J].沈阳理工大学学报,2009,28(3):39-41.
[13] 国家技术监督局.GB14912-94大比例尺地形图机助制图规范[S].北京:中国标准出版社,1994.
A Point Cloud Compression Algorithm Based on Rapid Prototyping
WAN Chenghui,CHENG Xiaojun,JIA Dongfeng
0494-0911(2012)06-0010-03
P208
B
2011-07-15
国家自然基金项目(40971241)
万程辉(1975—),男,江西南城人,讲师,博士生,主要研究方向为三维激光扫描数据处理。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28 07:34:30
制造技术与机床(2019年9期)2019-09-10 07:36:54
西南交通大学学报(2018年6期)2018-12-18 02:22:28
制造技术与机床(2017年5期)2018-01-19 02:48:50
河北遥感(2017年2期)2017-08-07 14:49:00
电信科学(2016年11期)2016-11-23 05:07:58
衡阳师范学院学报(2016年3期)2016-07-10 07:16:27
中国组织化学与细胞化学杂志(2016年3期)2016-02-27 11:15:40
中国卫生标准管理(2015年24期)2016-01-14 09:28:57
中国塑料(2015年5期)2015-10-14 00:59:40