
基于线性霍尔传感器的角度测量的非线性校正方法研究
2012-11-14 11:05史旺旺沈楚焱
电子测试 2012年4期
杨 鹏,史旺旺,沈楚焱
(扬州大学能源与动力工程学院,江苏扬州 225009)
0 引言
线性集成霍尔传感器的用途相当广泛,它具有小尺寸、高精度和低价的特点,它是将单晶片磁敏单元、线性差动放大器、差动射极跟随器和稳压器等集成在一起的一体化器件。由于它输出有很好的线性度,所以特别适合对位置、重量、速度等非电量参数的测量。霍尔传感器特性曲线的非线性误差的大小直接影响到上述参数的测量,通常希望其输出特性曲线是线性的,但是实际上绝大多数输入和输出都存在一定程度的非线性,为了获得高精度的测量结果,传感器特性曲线的线性化和非线性误差补偿与校正显得十分必要。目前已提出了硬件补偿法、多项式拟合、神经网络法等方法[1-2]。以上各种方法都是为了让理论值和实际值尽可能一致,这些方法各有优缺点。
本文提出了一种基于线性霍尔传感器的角度测量的非线性校正方法,在角度测量中具有独特的优点,被广泛应用于汽车角度的测量等精密测量中,给出了测量原理和非线性校正方法及传感器硬件设计,通过单片机系统实现数据采集、处理及传输。
1 线性霍尔传感器测量角度原理
根据霍尔效应原理知:霍尔片处于磁场中,并在垂直于磁场的方向上通以电流时,霍尔片上与电流和磁场垂直的方向会产生霍尔电势差VH=KBI,当通过霍尔片的电流恒定不变时,改变磁场的大小,可以改变VH。
当霍尔片上与电流和磁场的方向不垂直夹角为q时,产生霍尔电势差VH=KBIsinq。采用如图1所示结构,不加线圈的传统测量方法,磁场由永久磁铁提供,保持它的控制电流和磁场强度不变,固定霍尔传感器的位置,让磁铁绕霍尔传感器旋转产生角度的变换,霍尔传感器输出电压将产生变化。采用如图1所示包括线圈校正后的结构,在固定磁铁上绕制一定匝数的线圈,线圈产生的磁场与磁铁产生的磁场B0垂直,空间磁场为上述两个磁场的叠加,同时保持控制电流不变,同样固定霍尔传感器的位置,让磁铁绕霍尔传感器旋转产生角度的变换,霍尔传感器输出电压也将产生变化。
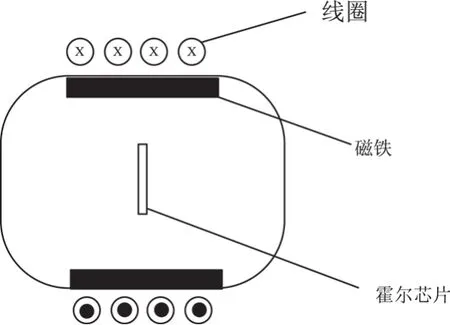
图1 校正结构图
2 校正方法
按照如图1所示,绕制一定匝数的线圈,线圈产生的磁场与磁铁产生的磁场B0垂直,空间磁场为上述两个磁场的叠加。假设霍尔片输出的电压为u,将该电压放大后串联一电阻后,与线圈串联,则线圈中的电流与u成正比,其产生的磁场B1也与u成正比,即B1=-K1u(注意电流方向),而霍尔片的输出电压与总磁场成正比,当霍尔线性时,利用叠加原理,输出为:

将公式变形得:

取 KuK1=0.54即可。
利用MATLAB6.5对图1所示的不加线圈的传统测量结构,其霍尔电压UH与夹角q的关系进行仿真,得到如图2所示中虚线所表示的结果;采用如图1所示包括线圈校正后的结构,对其进行仿真得到如图2所示中实线所表示的结果。从图中可见电压与角度的线性度将大大提高,图中实线为校正后曲线,虚线为没有校正的曲线。从两种结构的仿真结果看,霍尔电压UH与夹角q的关系曲线明显线性增加,测量范围扩大。
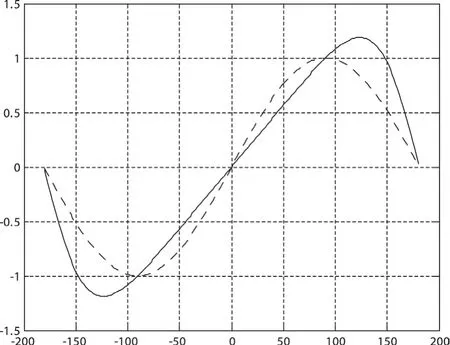
图2 仿真结果
3 电路设计[3-8]
以集成线性霍尔传感器UGN3501型为例,它的工作温度范围0 ℃~70 ℃,电源电压范围8~12 V,在供电电压+12 V,环境温度25℃的情况下,工作通频带为25 kHz,输出的最大电流达到了20 mA。传感器处理电路如图3所示,主要包括差分放大器和低通滤波器等几部分。运算放大器mA741与R3、R4、R5、R6组成差分放大电路,差分放大电路的同相输入信号为UGN3501的输出,反相输入信号由R1、RW1、R2组成的分压电路产生。R7、C3组成无源低通滤波电路可滤除差分电路输出信号中的高频成份,提高电路的抗干扰能力。电路输出端电压U0接电表,用于指示电压的大小。
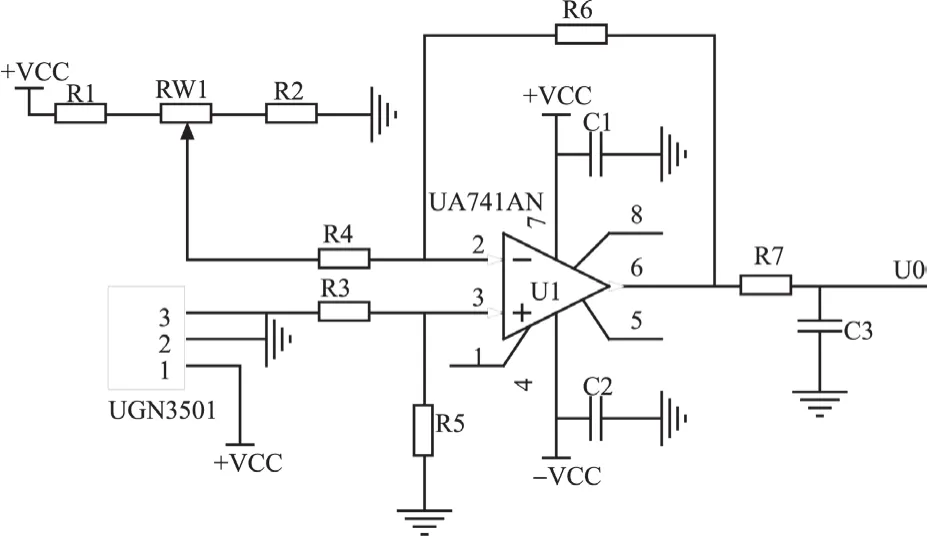
图3 测量电路
4 测量结果
采用图3的测量电路,进行实验测试测量结果如表1所示。

表1 测量结果
误差分析表明:测量角度的误差在5%以内,传感器性能稳定,能满足测量角度的实际需要。
[1]牛洁,周静,苟娜.基于霍尔传感器的直流电机转速测量系统设计[J].电子测试,2008(5):75-78.
[2]田汉波.一种基于线性霍尔传感器的直流电机转速测量方法[J].机械与电子,2007(1):31-33.
[3]陈敏,马丽.传感器特性曲线的一种拟合方法[J].传感器技术,2003,22(1):38-40.
[4]邓重一.利用霍尔传感器芯片设计直流电流检测电路[J].传感器技术,2003,22(6):50-52.
[5]何涛,胡生清,蔡晴.霍尔式传感器的信号调理电路[J].传感器技术,2001,20(12):95-97.
[6]张微,高国旺,李汉兴.新型压电式传感器前置放大电路的设计[J].电子测试,2010(6):10-13.
[7]李晓红,范锦标,王燕.2万g量程压阻式加速度传感器的非线性研究[J].电子测试,2011(4):95-97.
[8]段风曾,信号检测理论[M],哈尔滨:哈尔滨工业大学出版社,2002:172-180.
猜你喜欢
当代陕西(2022年6期)2022-04-19
娃娃乐园·综合智能(2021年12期)2022-01-18
国学(2020年1期)2020-06-29
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
童话王国·文学大师班(2017年6期)2017-07-10
微特电机(2017年10期)2017-05-15
中学生数理化·高二版(2016年12期)2017-02-28
Coco薇(2016年1期)2016-01-11
太空探索(2015年6期)2015-07-12
