离心机加速度反馈方式研究
2012-11-12 11:20薛常斌
长江科学院院报 2012年3期
薛常斌,栗 庆
(中国工程物理研究院总体工程研究所,四川绵阳 621900)
离心机加速度反馈方式是指在离心机转臂上或吊舱内的某个用户关心的位置安装一个线加速度计,在离心机运行时,以线加速度计的值作为反馈,与系统过载设定值进行比较,若产生过载误差则通过闭环控制器来调节,从而修正误差,使线加速度计反馈值与过载设定值相吻合。通过这种反馈方式,用户可以更直观地监测到所关心位置的过载情况,对有过载考核要求的试验有重要的参考价值。
1 闭环控制系统
线加速度计的输出电压为一连续的模拟量,在模拟量(连续)控制系统中,为了保证控制系统的输出能够很好地跟随输入给定的变化,采用了如图1所示的闭环控制系统。

图1 闭环模拟控制系统的组成Fig.1 Structure of the closed-loop control system of analog quantity
闭环控制系统基于反馈的概念,测量关心的变量,与期望值相比较,用这个误差调整控制系统的响应。这个理论和应用的关键是:做出正确的测量和比较后,如何才能更好地纠正系统,而调节器正是闭环控制系统的核心部件。
在工程实际中,应用最为广泛的调节器控制规律为比例控制、积分控制、微分控制,简称PID控制,又称PID调节。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型,且控制理论的其它技术难以采用时,系统控制器的结构和参数需依靠经验和现场调试来确定,这时可应用PID控制技术。即当我们不完全了解一个系统和被控对象﹐或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。
在实际闭环控制系统中,误差e(t)是1个很小的变化量,因此,为了对系统进行更精确的控制、消除系统在稳态时的输出误差、改善系统的动态响应性能,需要对误差e(t)进行比例调节(P)、积分(I)、微分(D)等处理,才能有效地控制系统中的执行机构,保证系统具有良好的动、静态性能。
西门子S7-300PLC具有PID调节的功能,所以确定以西门子S7-300PLC为核心组成闭环模拟量控制系统。
1.1 闭环系统组成的确定
以西门子S7-300PLC为核心组成PID调节闭环系统,硬件组态如图2所示。使用西门子PS307/5A电源模块、cpu315-2 pn/dp、2点模拟量输入模块SM331、16点数字量输入模块SM321、8点数字量输出模块SM322、2点模拟量输出模块SM332各1块。

图2 PLC硬件组态图Fig.2 The configuration of PLC hardware
1.2 PID调节被控量的实现
在本闭环控制系统中,给定为0~10 V可调电压源,反馈为线加速度计输出电压,这2个值都通过PLC模拟量输入模块采集进入PLC中,被控量为给定电压源与线加速度计反馈电压值的偏差值,此偏差值为一连续的模拟量信号,可以送入PLC软件模块 FB41“CONT_C”(连续控制器,如图3所示)进行PID调节,调节后的值通过PLC模拟量输出模块输出至驱动器。

图3 FB41程序图Fig.3 FB41 module of PLC
2 试验验证
2.1 离心机试验特性
离心机是由安装试验件的吊篮、转臂、平衡配重、转台、减速装置、电机、集流环和测控系统等组成。在电机的拖动下,吊篮作等速圆周运动,试验件上产生恒加速度环境,即

由公式(1)可推导出

式中:G为离心机加速度(g);ω为离心机角速度(rad/s);R为试验件重心离旋转中心的距离(m);n为离心机转速(r/min)。
2.2 试验过程
在离心机上安装夹具工装,如图4所示。夹具设计成中正方体铁块,顶部有孔,中间是空心的,底面焊接了1个500mm×500mm的铁板,其接口按照离心机吊篮底板上的安装孔位设计,整个夹具安装在离心机吊篮上。线加速度计安装在夹具的顶部(图中圆形物体)。
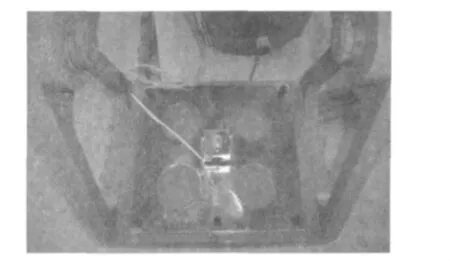
图4 线加速度计安装示意图Fig.4 The installation of linear accelerometer
2.3 试验方案
利用现有离心机进行试验,线加速度计安装在吊篮底板平台上,试验G值范围为0~50 g。在相应G值上测量线加速度计反馈回来的电压输出值,与给定电压源进行比较;线加速度计反馈电压值及给定电压值均由PLC中的模拟量输入模块采集完成;采集的数据通过PLC中的PID模块比较,比较结果再通过PID调节器输出至PLC模拟量输出模块;最后输出至离心机直流调速器,驱动执行机构(电机),控制离心机转速。
2.4 试验结果
使用PLC开发软件STEP7进行了PID调节程序设计,程序采用梯形图的方式,最终的被控量通过模拟量输出模块输出至直流调速器。在控制程序编制完成后,连接PLC、主控计算机和调速器,按照控制要求设置各项控制参数,完成控制系统联调。
以下为一实例。离心机停机时,手动调节给定电源为989 mV,即功能块 FB41参数SP_INT为9.89;加速度计反馈电压值为162 mV(零点电压),即功能块FB41参数PV_IN为1.62。此时对功能块FB41参数Gain和TI参数进行调节,将PID输出值(功能块FB41参数LMN)输出至模拟量输出模块,此电压值输出至驱动器中的模拟量输入端子,作为给定启动离心机旋转,改变不同的P,I参数,观察PID调节效果(表1)。
试验中,通过P,I参数的调节(D参数没有使用),发现P,I参数太大或太小都不能满足控制要求,当P=0.05,I=1 时,输出 LMN 值稳定为18.325,给定曲线(红色曲线)和反馈曲线(黄色曲线)基本重合,如图5所示。图中加速度给定电压值为989 mV,对应给定加速度值为6.01 g,实际调节后转速稳定为52.25 r/min,反馈加速度值为6.08 g,误差为1.12%,调节过程对应转速与时间曲线如图6所示。

表1 PID实际参数及调节效果表Table 1 The PID actual parameters and the adjustment results

图5 PID调节曲线图(P=0.05,I=1)Fig.5 PID adjustment graph(P=0.05,I=1)
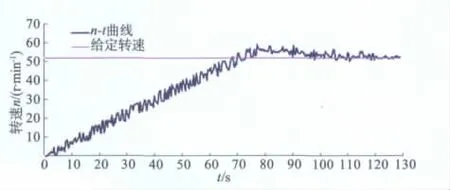
图6 转速-时间曲线图(P=0.05,I=1)Fig.6 Rotate speed-time graph(P=0.05,I=1)
从图6中可以看出给定曲线和反馈曲线的偏差很小,满足控制要求。实际使用中,当取P,I参数为P=0.05,I=1 时,进行连续试验,给定电压从164.5~4 935 mV进行了调整,对应于加速度值为1~30 g,其反馈电压输出值与给定电压值基本吻合,误差在1%左右。
3 结论
通过试验,说明在离心机上采用线加速度计反馈控制方式是可行的。试验中根据线加速度计的加速度与输出电压线性关系设定给定电压,实现了线加速度计反馈控制。从图5、图6可看出,给定曲线和反馈曲线仍未实现完全无偏差,分析原因认为是由离心机吊篮的摆动所引起的,在恒加速度试验时,机械传动机构或轴承间隙、转臂两边质量不平衡等因素造成离心机试验转速波动,从而使加速度出现波动。
[1]陆惠良.载人离心机及其应用[M].北京:国防工业出版社,2004.(LU Hui-Liang.Man-Carrying Centrifuge and Its Application[M].Beijing:National Defence Industry Press,2004.(in Chinese))
[2]龚仲华.S7-200/300/400 PLC应用技术[M].北京:人民邮电出版社,2008.(GONG Zhong-Hua.Applied Technology of S7-200/300/400 PLC[M].Beijing:Posts& Telecom Press,2008.(in Chinese))
[3]李金城.PLC模拟量与通信控制应用实践[M].北京:电子工业出版社,2011.(LI Jin-cheng.Application Practice of PLCAnalog and Communication Control[M].Beijing:Electronic Industry Press,2011.(in Chinese))
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
中国盐业(2018年20期)2019-01-14
测控技术(2018年1期)2018-11-25
测控技术(2018年12期)2018-11-25
电子制作(2018年11期)2018-08-04
临床肝胆病杂志(2017年1期)2017-03-07
电子制作(2016年21期)2016-05-17
电测与仪表(2015年11期)2015-04-09
电测与仪表(2015年3期)2015-04-09
装备环境工程(2015年5期)2015-02-28