
计算弯曲变形的几何法
2012-11-05 07:35:52陈合龙姜凤华何春木
浙江科技学院学报 2012年6期
陈合龙,姜凤华,何春木
(台州学院 建筑工程学院,浙江 台州318000)
计算弯曲变形的方法比较多,常用的方法有积分法[1-7]、初参数法[8-10]、能量法[9-12]和虚功法[13]。积分法和初参数法适合计算直杆或折杆弯曲的位移,但无法计算曲杆弯曲的位移;拓展后的积分法可分析超静定结构的弯曲变形问题[6-7]。虚功法基于虚功原理来计算弯曲位移,但是它的计算过程涉及多次弯矩计算,而且每次只能计算一个点在一个方向的位移[13]。实际上,常用方法都回避了弯曲变形问题是几何问题这一本质,因而它们都有缺陷。基于这个思路,本研究从弯曲变形的几何性出发,利用基本的变形-内力关系,笔者找到了计算弯曲变形的新积分法。该方法适用于计算各种形状的杆件的平面弯曲小变形问题,对静定结构和超静定结构弯曲问题的分析步骤也是一致的。因此,该方法不仅是常规方法的重要补充,而且不失为一个计算平面弯曲问题的新选择。
1 公式推导
为了简便起见,以悬臂杆为例。如图1所示,悬臂杆长为l,杆在平面内的抗弯刚度为EI,左端A固定,右端B受集中力F的作用。建立如图所示的坐标系。设杆弯曲的挠曲线方程为w=w(s),转角方程为θ=θ(s)。
先计算B端的挠度wB,为此取长度很小的一段杆Δs,查看由于这一小段杆的弯曲造成的B的挠度,如图2所示。
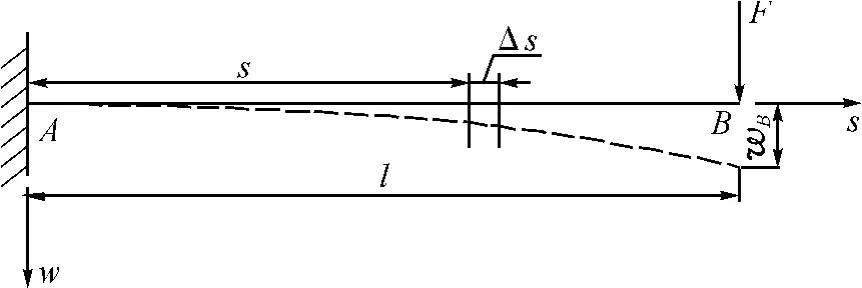
图1 悬臂杆Fig.1 Cantilever bar

图2 微段弯曲Fig.2 Segmented bar under bending
图中,θ(s)为s处的转角,Δθs为微段Δs的转角的改变量。假定杆的变形很小,则:

容易看出,Δw1为s处的转角引起的B端的位移,Δw2+Δw3为微段Δs的弯曲引起的B端的位移。
在变形很小的情况下,有

将式(5)代入式(3),并利用式(4):

得:

假设s处的曲率半径为ρ,则有

联系式(7),比较式(2)和式(6),可知Δw2相对于Δw3为高阶微量。即:

B的挠度wB等于s=0处的转角引起的B的挠度,对应式(9)等式右边的第一项,加上杆弯曲引起的B的挠度,因此可以这样计算:
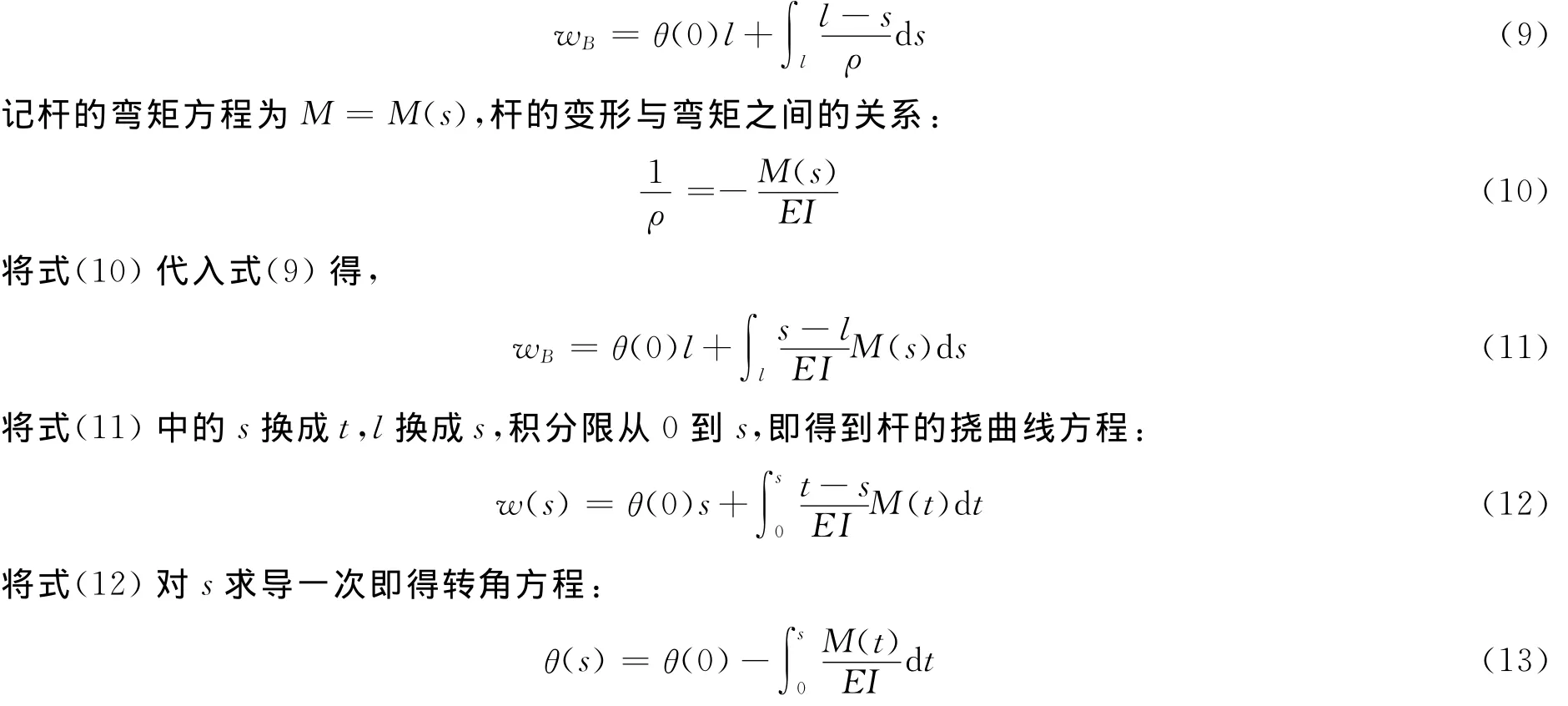
2 推广到曲杆
为方便起见,以半径为R的1/4圆弧曲杆为例,如图3所示。杆在平面内的抗弯刚度为EI,A端固定,B端受集中力F作用。建立如图局部坐标系,坐标轴s沿杆的轴向从A到B,τ为在任意s处的切向,并与坐标轴s正向一致。w与坐标轴s处处正交,且从τ绕其起点顺时针旋转90°到达w正向。整体坐标系xoy,原点为A。现在要研究的是在荷载作用下杆的任意位置的位移。设弯曲的挠曲线方程为w=w(s),转角方程为θ=θ(s)。
图中τ、w、φ(s)、l(s)都是与s相关的量。其中,l(s)是坐标为s的C点与B的距离,φ(s)为CB在xoy坐标系下的角度。
不难看出,直杆下的计算式(从式(1)到式(13))均可顺利地推广到局部坐标系(ws)下。
同样地,B点的位移可以这样计算:s=0处的转角引起的B的位移,加上曲杆弯曲引起的B的位移。那么,第一部分由s=0处的转角引起的B的位移可以表示为:

图3 1/4曲杆Fig.3 1/4curved bar

式(14)和式(15)中,下角标x、y分别表示沿x、y方向的位移,θ(0)为A处的转角,l(0)为AB 的长度,φ(0)为AB与x正向的夹角。
第二部分由曲杆的弯曲引起的B的位移为:

式(16)和式(17)中的下角标s表示对整个曲杆积分的意思。
因此,将式(14)、式(15)、式(16)和式(17)对应相加,即得端点B的位移为:

将式(10)代入式(18)、式(19)得,

对于任意坐标为s的点的位移的计算式可以表示为:

需要说明的是,与式(18)、式(19)中不同,式(22)、式(23)中,l、φ有两个参数,它们是两个点的弧坐标,第一个参数表示第一个点的弧坐标,第二个参数表示第二个点的弧坐标,l表示这两点的距离,φ表示由第一点连向第二点的线段与x轴正向的夹角。
曲杆的转角计算式与直杆的转角计算公式(13)相同。
需要指出的是,对于静定问题,式(12)、式(13)、式(22)和式(23)中只涉及一个初参数(如起点的转角),这个初参数可以是已知的,也可以是待定的;而对于超静定问题,需要增加初参数(起点的转角、弯矩、剪力),以表示出方程中的各项,待定的初参数都可以通过约束条件来确定。
必须说明,弯曲构件的位移主要由弯矩引起,通常不计入轴力和剪力对弯曲位移的影响,以上推导也以此为前提。
3 应用举例
本节将计算图1所示的悬臂杆的挠曲线方程和转角方程,以及图3所示的1/4圆弧杆的位移方程和转角方程。
对于悬臂杆,将弯矩方程M(t)=-Fl+Ft及θ(0)=0代入式(12)中,积分得到悬臂杆的挠曲线方程:

对s求导的转角方程,

式(24)、式(25)的结果与文献[1]一致。
对于1/4圆弧杆,为计算方便,不妨采用极坐标进行计算。如图4所示,对照式(13)、式(22)和式(23),有如下关系式:

将式(26)和弯矩方程 M =-FRcosα代入式(13)、式(22)和式(23),得
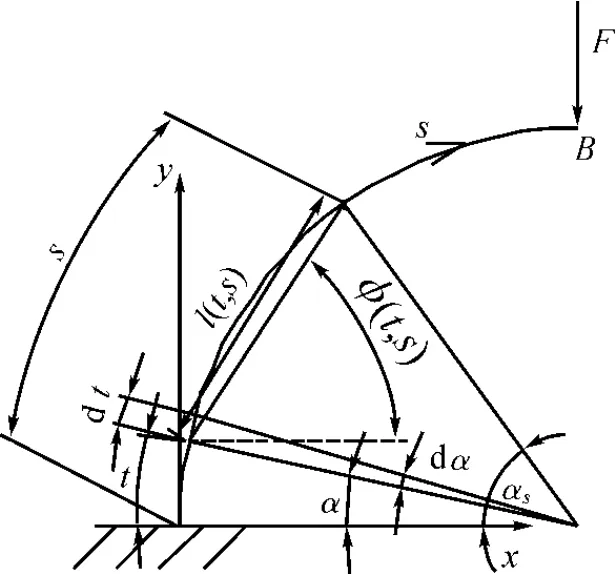
图4 坐标转换Fig.4 Coordinate transformation
积分得,


式(28)的第三方程与文献[13]的结果一致。
对于其他的静定或超静定结构平面弯曲问题的求解,计算步骤是一样的。所不同的是,可能需要利用约束条件来确定起点的待定参数。
4 结 语
本研究从弯曲变形的几何属性出发,推导了计算弯曲变形的新公式,其思路更具一般性,计算也更简便。该方法可以计算曲杆的平面弯曲的变形问题,并且公式中的各项及积分转化成电算也很方便,进一步拓展了它的适用范围。相比于虚功法,其思路更直接,同时避免了虚功法每次计算只能得到一个位移的缺陷。
[1] 王吉民.材料力学[M].北京:中国电力出版社,2010.
[2] 孙训方,方孝淑,关来泰.材料力学I[M].北京:高等教育出版社,2009.
[3] 刘鸿文.材料力学Ⅰ[M].北京:高等教育出版社,2004.
[4] 单辉祖.材料力学Ⅰ[M].北京:高等教育出版社,2002.
[5] 范钦珊,蔡新.材料力学:土木、水利类[M].北京:清华大学出版社,2009.
[6] 王秀华,张春秋,门玉涛,等.超静定梁变形计算的积分法[J].力学与实践,2009,31(4):79-81.
[7] 马希龄,张广泰,肖正华.等截面圆弧杆件的转角位移方程[J].新疆工学院学报,1999,30(2):79-83.
[8] 刘庆潭.材料力学教程[M].北京:机械工业出版社,2006.
[9] 希伯勒.材料力学[M].汪越胜,译.北京:电子工业出版社,2006.
[10] 孙国钧.材料力学[M].上海:上海交通大学出版社,2006.
[11] Beer F P,Johnston E R,Sun G J.Mechanics of materials[M].2ed.New York:McGraw-Hill,1992.
[12] Gere J M,Timoshenko S P.Mechanics of materials[M].New York:Von Nostrand Reinhold,1984.
[13] 朱伯钦,周竞欧,许哲明.结构力学:上册[M].上海:同济大学出版社,2004:215-216.
猜你喜欢
课程教育研究(2021年10期)2021-04-13 23:11:51
装备制造技术(2020年2期)2020-12-14 03:09:38
中国特种设备安全(2019年3期)2019-04-22 05:05:38
摄影之友(影像视觉)(2017年11期)2017-11-27 02:39:49
课程教育研究·新教师教学(2015年12期)2017-09-27 16:09:40
山东工业技术(2016年15期)2016-12-01 05:31:05
设备管理与维修(2016年6期)2016-03-16 02:21:57
人间(2015年16期)2015-12-30 03:40:44
中国塑料(2015年6期)2015-11-13 03:03:07
振动工程学报(2015年2期)2015-03-01 01:16:04
