
船用捷联惯性导航系统惯性系快速对准算法*
2012-10-16 08:07柴永利
舰船电子工程 2012年2期
柴永利 张 鑫 章 波
(1.中国空空导弹研究院 洛阳 471000)(2.哈尔滨工程大学自动化学院 哈尔滨 150001)(3.中国石油管道兰州输气分公司 兰州 730070)
1 引言
初始对准是惯性导航系统的关键技术之一[1~3],对准精确性和快速性直接影响到惯性导航系统的性能。当舰船处于系泊状态时,由于风浪作用将产生摇摆及荡运动。由摇摆引起的干扰角速度远大于地球自转角速度,此时陀螺输出中的信噪比十分低,且干扰角速度具有很宽的频带[4~5],无法从陀螺输出中将地球自转角速度这一有用信息提取出来。另外,摇摆及荡运动也导致加速度计的输出中存在较大的干扰加速度。虽然水平调平+罗经回路的方法可以较好地解决对准精度问题[6~7],但是航向误差与北向速度误差的耦合较弱导致航向对准速度较慢。文献[8]提出了利用水平失准角估计值快速计算方位失准角的算法,但该算法用到了失准角的微分,其高频噪声很难被滤除;文献[9]利用重力加速度在惯性系下的圆锥慢漂的特性,提出了基于惯性系的对准方案,如何获得准确的重力加速度信息成为实现惯性系对准的关键[10~13]。
本文利用捷联惯导水平对准精度较高且速度较快的特点,在完成水平对准后直接计算出重力加速度在基座惯性系的投影,进而实现惯性导航系统的初始对准。
2 惯性系对准原理
在对准过程中用到了导航坐标系(n系)、载体坐标系(b系)、惯性坐标系(i系)、基座惯性坐标系(ib0系,初始时刻经过惯性凝固的载体坐标系)以及水平坐标系(h系,zh与zn重合、ohxhyh平面为水平面的直角坐标系)等坐标系。上述坐标系之间的关系如图1所示。
按照图1可确定b系与n系的转换关系:
其中,
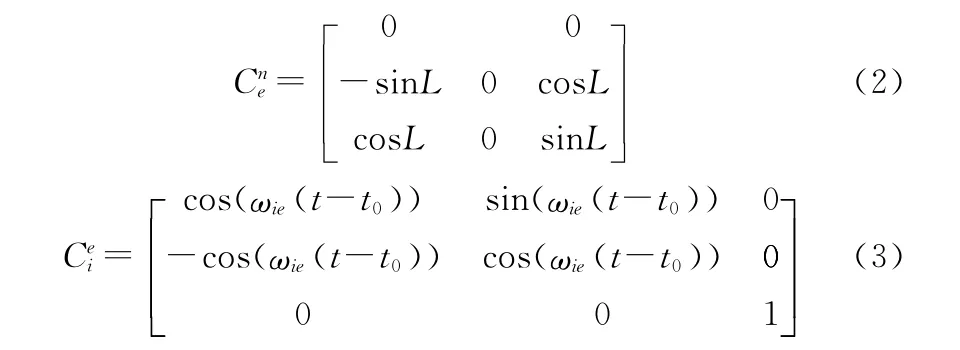
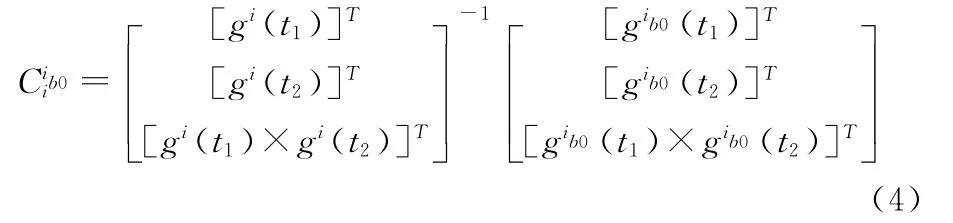
其中,L为当地纬度;ωie为地球自转角速率;t0为惯性系对准开始的时刻;可由陀螺输出实时更新(初值为单位阵);因此只需确定即可完成初始对准。根据双矢量定姿的原理[14],可以通过两个时刻重力矢量在i系和ib0系下的投影获得:

图1 各个坐标系相对位置关系
3 捷联惯性导航系统惯性系快速对准算法
忽略加速度计零偏的影响,载体静止时加速度计的输出fb即为重力加速度在载体坐标系上的投影,采用惯性系对准算法很容易实现捷联惯导初始对准。系泊条件下,加速度计的输出还包括摇摆及荡引起的干扰加速度,很难从中提取出对准所需的重力信息,为此采用水平精对准方法获得。
3.1 水平精对准算法
捷联惯导系统的速度误差信息包含了水平失准角信息,通过观测速度误差并设计合理的控制回路即可完成水平对准。本文采用三阶调平回路实现捷联惯导水平精对准。
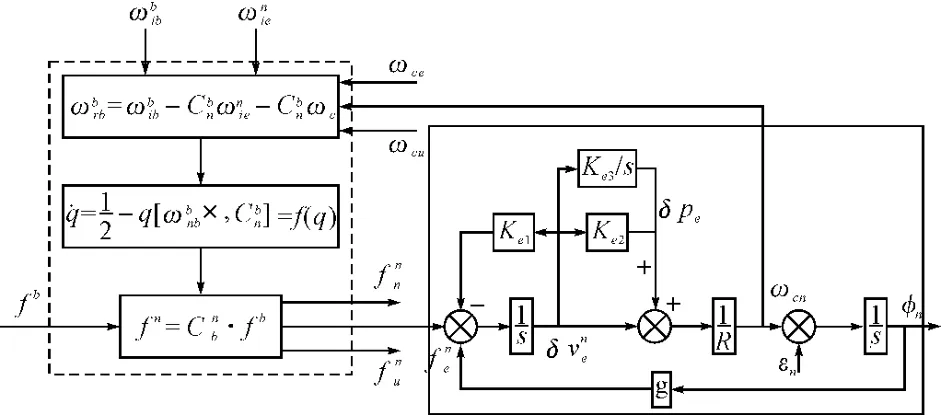
图2 捷联惯导水平对准东向通道

3.2 惯性系对准的实现
在水平对准完成后,仍控制捷联惯导系统工作在水平对准模式。根据水平坐标系定义,b系与n系的转换矩阵即为捷联惯导完成水平对准后的捷联矩阵。由于h系和n系同为当地水平坐标系,因此gh=gn=[0 0 -g]T。重力矢量在ib0系的投影可按照式(5)获得:

为减小水平对准波动对gib0(t)的影响,采用加权求平均滤波算法对其进行消噪处理。这种方法是最简单的一种信号处理方式,算法公式如下:设已知等距采样x0<x1<…<xn-1<…上的观测数据为y0,y1,yn-1,…,表示yi的平滑值。取加权系数为1则有:

4 仿真及系泊试验
4.1 仿真试验
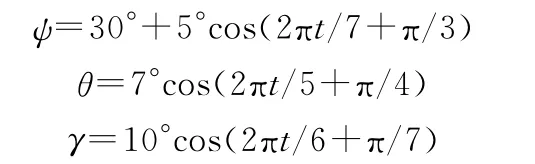
1)假设在风浪影响下,舰体的航向角ψ、纵摇角θ和横摇角γ作周期变化:
2)存在横荡、纵荡和垂荡引起的线速度:

3)杆臂长度:lx=20m,ly=10m,lz=5m;

图3 惯性系快速对准时序图
仿真结果如图4所示。由图可看出:1)对准精度较高:纵摇、横摇和航向失准角标准差为 0.0035°(1σ)、0.0086°(1σ)和0.0561°(1σ);2)对准重复性较好:纵摇失准角波动范围为-0.00354°~-0.00352°,横摇失准角波动范围为0.00859°~0.00864°,航向失准角波动范围为-0.0565°~-0.0557°。如果采用水平调平+罗经回路方法进行对准,根据惯性器件误差与水平调平+罗经回路对准误差的对应关系[16],并考虑所设定的惯性器件精度,其对准误差应与仿真结果基本吻合。因此认为仿真试验中对准误差主要由惯性器件误差引起。

图4 惯性系快速对准仿真试验结果
4.2 系泊试验
图5 系泊对准试验设备
为进一步验证上述对准算法的有效性,利用哈尔滨工程大学研制的中等精度光纤陀螺捷联惯导系统(以下简称光纤惯导)开展系泊试验。其中光纤陀螺陀螺漂移约为0.01°/h,加速度计零偏约为10-4g。将光纤惯导与Ixsea公司的PHINS固定在刚性较好的铝合金板上,在静态条件下重复多次测定二者之间的固定安装偏差。对准时间的选取与仿真试验中采用的一致,对准完成后转入纯惯导工作状态。在光纤惯导对准过程中使PHINS工作在与GPS组合模式,光纤惯导输出姿态并经固定安装偏差补偿后得到姿态角ψ1、θ1和γ1,与 PHINS输出的姿态角ψPHINS、θPHINS和γPHINS作差,得到姿态误差角δψ、δθ和δγ。按式(6)对姿态误差角进行1分钟平滑后得到姿态误差角的平均值δ¯ψ、δ¯θ和δ¯γ。并以δ¯ψ、δ¯θ和δ¯γ考察系泊对准精度。

表1 系泊试验结果
5 结语
本文提出了一种系泊条件下捷联惯性导航系统快速对准方法。通过三阶调平回路完成捷联惯导水平精对准,确定载体坐标系与水平坐标系之间的关系。利用重力加速度在水平坐标系为常值这一已知条件,将重力加速度投影到基座惯性坐标系并进行平滑处理,进而利用惯性系对准原理实现了舰载捷联惯导初始对准。通过仿真试验和系泊试验可以看出,该方法不需要外界参考信息,同时具有工程实现简单、对准精度高、对准时间短的优点。定量分析惯性器件误差与惯性系快速对准精度之间的关系,以及合理地调整水平精对准控制回路参数是下一步的研究方向。
[1]李东明,谈振藩,郝颖.一种新的捷联惯导系统初始对准方法[J].中国惯性技术学报,2005,13(2):1-4.
[2]郭美凤,杨海军,腾云鹤,等.激光陀螺惯导系统扰动基座上的初始对准[J].清华大学学报,2002,42(2):179-181.
[3]严恭敏,翁浚,赵长山,等.捷联惯导系统改进参数辨识初始对准方法[J].中国惯性技术学报,2010,18(5):523-526.
[4]徐博,郝燕玲,刘付强.数字滤波方法在光纤陀螺捷联罗经系统中的应用[J].仪器仪表学报,2007,28(8):328-331.
[5]练军想,汤勇刚,吴美平,等.捷联惯导惯性系动基座对准算法研究[J].国防科技大学学报,2007,29(5):95-99.
[6]经张俊,程向红,王宇.捷联罗经的动基座自对准技术[J].中国惯性技术学报,2009,17(4):408-412.
[7]李瑶,徐晓苏,吴炳祥.捷联惯导系统罗经法自对准[J].中国惯性技术学报,2008,16(4):386-389.
[8]J.C.Fang,D.J.Wan.Fast initial alignment method for strapdown inertial navigation system on stationary base[C]//IEEE Transactions on Aerospace and Electronic Systems,1996,32:1501.
[9]Gaiffe T,Cottreau Y,Faussot N,et al.Highly Compact Fiber Optic Gyrocompass for Applications at Depths up to 3,000Meters[C]//IEEE Underwater Technology,Proceedings of the International Symposium,2000.
[10]孙枫,孙伟.基于数字滤波的系泊对准技术研究[J].控制与决策,2010,25(12):1870-1874.
[11]秦永元,严恭敏,顾冬晴,等.摇摆基座上基于信息的捷联惯导粗对准研究[J].西北工业大学学报,2005,23(5):681-684.
[12]练军想,吴文启,吴美平,等.车载SINS行进间初始对准方法[J].中国惯性技术学报,2007,15(2):155-159.
[13]严恭敏,秦永元,卫育新,等.一种适用于SINS动基座初始对准的新算法[J].系统工程与电子技术,2009,31(3):634-637.
[14]赵长山,秦永元,白亮.基于双矢量定姿的摇摆基座粗对准算法分析与实验[J].中国惯性技术学报,2009,17(4):436-440.
[15]骆卉子,林雪原,周旻.基于小波降噪预处理的组合导航系统研究[J].计算机与数字工程,2011,39(10).
[16]秦永元.惯性导航[M].北京:科学出版社,2007:263-272.
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
舰船科学技术(2022年10期)2022-06-17
船海工程(2020年3期)2020-07-31
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
火控雷达技术(2016年1期)2016-02-06
弹箭与制导学报(2015年1期)2015-03-11
计算技术与自动化(2014年1期)2014-12-12
导航定位与授时(2014年2期)2014-04-27
