
潜艇打击远程目标的引导时间延迟问题研究*
2012-10-16 08:06宋世英迟国仓
舰船电子工程 2012年2期
宋世英 迟国仓
(1.海军潜艇学院学员3队 青岛 266071)(2.海军潜艇学院作战指挥系 青岛 266071)
1 引言
潜射反舰导弹往往是一种具有自动寻的功能的远战武器,它的出现改变了传统的潜艇使用鱼雷的攻击方法。先敌发现、先敌攻击是潜艇导弹攻击的重要原则,但因潜艇的探测距离有限,难以自主发现目标并完成远程攻击,致使潜射远程反舰导弹的优势无法完全发挥,故需向潜艇发送目标信息引导其完成远程攻击。这样,目标信息延迟时间便成为潜射反舰导弹能否成功捕捉目标的重要因素。现从时间延迟对导弹捕捉概率的影响,研究和分析引导潜艇远程攻击中对时间延迟的要求。
2 各个阶段的时间延迟分析
现代潜艇在航渡和待机阶段,大部分时间处于水下,无法接收短波及超短波信息,此时则需岸基对潜指挥所使用极长波呼唤潜艇上浮以接收指令信息。
其组织实施要求是:将潜艇预先部署于有利待击的区域内,当信息保障条件符合实现“侦察兵力—岸基指挥所—潜艇”链路的信息畅通、且满足潜射导弹的命中条件时,即可实施远程打击。
具体实施过程是:侦察预警兵力(包括侦察预警传感器)发现目标后,便对其进行跟踪、识别和测定要素,并将目标信息发送至岸基指挥所;岸基指挥所经过判情后定下打击决心,使用极长波呼唤处于待机区域的潜艇上浮接收指令信息;潜艇上浮后接收指令信息,对信息进行判情,判断是否符合远程打击条件(目标处于导弹火力的打击范围之内或者通过必要的机动能够打击到目标);如果符合远程打击条件,潜艇则准备武器系统,武器系统准备好后,立即对目标实施导弹远程打击。在整个过程中,有可能需要潜艇进行必要机动使目标处于导弹射程之内。
当潜艇不需要机动即可进行火力打击时,其指令打击流程及流程中各个环节的时间延迟如图1所示。
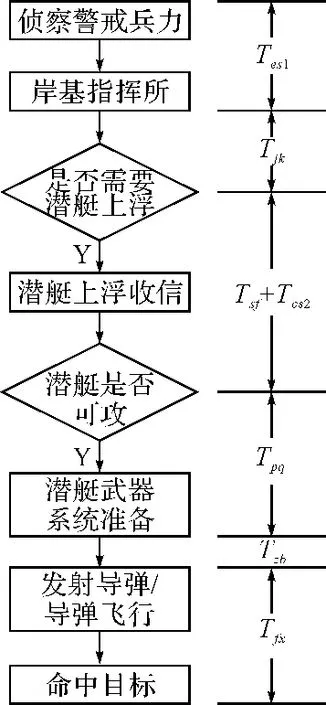
图1 指令打击主要流程及延迟时间
图中,Tcs1为引导兵力发现目标并进行目标识别后向岸基指挥所传送信息的迟滞时间;Tjs为岸基指挥所接收目标信息后定下打击决心所需的时间;Tsf为岸基指挥所通过长波呼唤潜艇上浮,至潜艇机动至可收信深度所需的时间;Tcs2为潜艇接收岸基指挥所的打击信息所需的时间;Tpq为潜艇指挥员收到打击信息后,判断目标可攻性的时间;Tzb为潜艇进行武器系统准备所需的时间;Tfx为导弹飞行时间。
整个过程中,延迟的总时间可以表示为

由此可以看出,延迟的总时间可以分为两个部分,一部分为系统反应所需的时间包括:Tcs1、Tcs2;另一部分为人为反应时间包括:Tjx、Tsf、Tpq、Tzb。
3 时间延迟对于捕捉概率的影响
3.1 综合计算公式[1,4,6]
导弹对单舰的捕捉概率主要取决于导弹制导雷达搜索扇面半宽、导弹自控终点散布误差和导弹的射击方式等。导弹的射击方式分为前置量射击和无前置量射击两种。现主要考虑无前置量射击时的捕捉概率,且不考虑导弹航行过程中风力对其位置误差的影响。现借助图2予以具体分析。
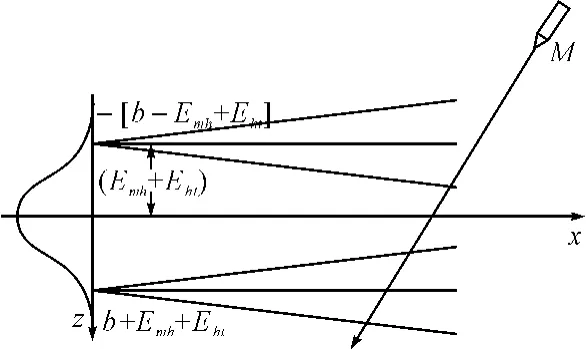
图2 捕捉目标概率分析示意图
由图可见,在保证制导雷达可靠捕捉目标的条件下,导弹到达自控终点时,其方向允许散布的最大允许范围为

式中,b为导弹末制导雷达搜索半宽;Emh为目标机动偏离导弹射向的距离,即目标机动产生的误差;Eht为由于时间延迟引起的目标偏离选择波门中心的误差,即时间延迟引起的位置误差。
由于不考虑风的影响,所以无前置量射击时导弹的侧向捕捉概率应为

式中,EZ为导弹在自控终点上的侧向散布误差。其中

式中,Vm为目标速度,Xm为目标舷角。
3.2 信息延迟对导弹命中概率的影响分析
为了便于计算和分析,现假设:导弹的自导距离为45km,理论自控终点散布均值为7000m、射程为300km、速度为300m/s,目标雷达反射特性满足技术要求且目标不采取任何对抗措施,目标运动方向与导弹运动方向垂直,不考虑常值风对导弹的影响,且导弹装有可向任意方向旋转±45°的雷达。
经MATLAB仿真计算可得图3之结果。
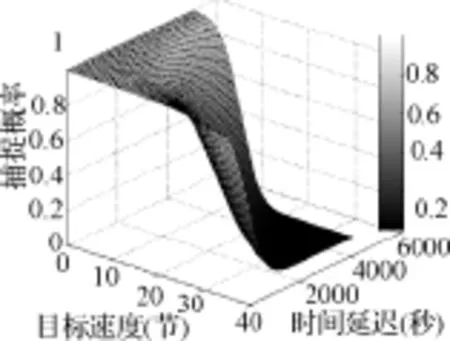
图3 目标速度、延迟时间与捕捉概率关系图
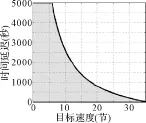
图4 捕捉概率为0.9时目标运动速度与延迟时间示意图
在实际运用中,通常对导弹的捕捉概率提出一定的要求。当要求捕捉概率不低于0.9时,可对图3进行投影截图而得到捕捉概率为0.9时延迟时间和目标运动速度的关系,如图4所示。
3.3 分析与结论
对图3和图4进行分析可得到:
1)由图3可见,当捕捉概率最高时,其延迟时间最小、目标运动速度最低。同时,当目标运动速度较小时,对于时间延迟的要求并不高,而当目标运动速度较高时,对时间延迟的要求则非常高。这就要求指挥员必须密切关注指令打击战法中时间延迟对捕捉概率的影响,以确保击中目标。
由图4可见,当要求导弹的捕捉概率为大于等于0.9时,应确保目标运动速度和信息延迟时间处于灰色区域;若在该区域之外,其捕捉概率将小于0.9。据此,指挥员可对是否攻击作出判断。
2)时间延迟的主要构成部分是系统反应时间和人为反应时间。系统反应所需的时间包括Tcs1、Tcs2,人为反应时间包括Tjx、Tsf、Tpq、Tzb。系统反应时间在一定条件下难以减少,人为反应时间则可通过相应的训练、提高操作人员的熟练程度而得以减少。
综上所述可以认为:在潜艇出航之前,应进行方案预案的制定,通过相关的方案约束岸基指挥机关和潜艇指挥员的人为反应时间;潜艇在预定的隐蔽待击区域时,选择既有利于隐蔽又有利于减少反应时间的深度(指对潜指挥所呼唤潜艇上浮所需的时间),减少潜艇上浮所需要的时间;设置反舰导弹“值班”制度,减少潜艇武器系统准备的时间。
4 结语
本文仅探讨了对远程导弹打击的组织实施问题,而在实战情况下,目标可能会采取各种机动以规避反舰导弹,也可能采取软硬措施对抗反舰导弹;目标也可能尚未处于反舰导弹的射程之内,潜艇需要进行机动才能实施打击;另外,风力也会对导弹散布产生影响,不良天气又会影响导弹自导雷达的作用距离。总之,上述因素都会影响导弹的捕捉概率,必须予以深入研究。
[1]沈辉.反舰导弹远程攻击捕捉概率模型研究[J].舰船电子工程,2008,28(1):56.
[2]关成启.反舰导弹捕捉目标概率算法模型[J].系统工程与电子技术,2002(7).
[3]王新宁.远程反舰导弹捕捉概率影响因素[J].四川兵工学报,2009,30(8):28.
[4]汪新刚.反舰导弹目标捕捉概率模型分析[J].战术导弹控制技术,2006(3):104.
[5]王林,李守秀.反舰导弹末制导雷达捕捉概率的分析计算方法研究[J].战术导弹技术,2007(5):12.
[6]汪新刚.反舰导弹现在点射击捕捉概率的计算方法[J].兵工自动化,2010(11):23.
[7]赵建军,王光辉.反舰导弹自控终点及其误差散布[J].火力指挥与控制,2003(10):15-18.
[8]孙建华.距离选择波门对导弹捕捉概率的影响分析[J].火力指挥与控制,2005(增刊):170.
猜你喜欢
煤气与热力(2021年3期)2021-06-09
沈阳航空航天大学学报(2021年1期)2021-03-18
沈阳航空航天大学学报(2020年6期)2021-01-27
数字海洋与水下攻防(2020年5期)2021-01-04
现代电子技术(2019年1期)2019-01-10
兵器知识(2017年10期)2017-10-19
大陆桥视野·下(2017年5期)2017-06-19
兵工学报(2017年3期)2017-04-11
海军航空大学学报(2015年1期)2015-11-11
上海航天(2014年6期)2014-01-09
