
基于BP神经PID的干粉砂浆搅拌储罐控制系统
2012-10-12 13:28蔡锦达李祥伟
制造业自动化 2012年5期
蔡锦达,李祥伟
CAI Jin-da, LI Xiang-wei
(上海理工大学,上海 200093)
0 引言
由于干粉砂浆搅拌储罐自动控制系统的时滞性、复杂的非线性特性、难以建立精确的数学模型,且由于对象和环境的不确定性,常规PID控制方法很难对其进行有效控制的问题,并且在实际应用中其参数整定问题一直是尚未很好解决的难点。
因此,为了获得理想的控制效果,本文提出将BP神经网络技术应用到干粉砂浆搅拌储罐湿度自动控制系统的系统在线辨识器(NNI)和自适应PID控制器(NNC)中,以解决复杂动态不确定系统的控制问题。采用BP神经网络对被控对象进行在线辨识,获得有效的系统模型,在此基础上,建立三层神经网络模型,在控制过程中按照梯度下降法修正神经网络的权系数,实现PID神经网络的自学习和逼近任意函数的功能,在控制过程中根据变化实时调整PID的三个控制参数,从而进行PID控制参数的在线整定,而不像传统PID控制需要人工调整。因此比传统的PID控制算法更具有良好的灵活性和适应性。
1 干粉砂浆搅拌储罐湿度控制系统的神经PID控制框图
为了达到要求的性能指标,对于处在不确定、不确知环境中的复杂的非线性不确定、不确知系统的设计问题,是控制领域研究的核心问题。神经PID控制是解决此类问题的一条有效途径。
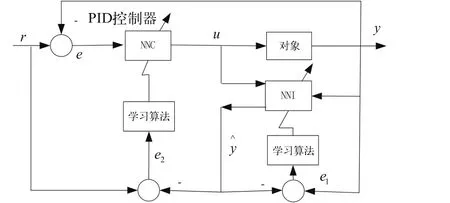
图1 神经PID控制框图
神经PID控制结构如图1所示,其中有两个神经网络:NNI—系统在线辨识器;NNC—自适应PID控制器。系统的工作原理:由NNI对被控对象进行在线辨识的基础上,通过对NNC的权系进行实时调整,使系统具有自适应性,从而达到有效控制的目的。
2 神经网络辨识器(NNI)
设被控对象为

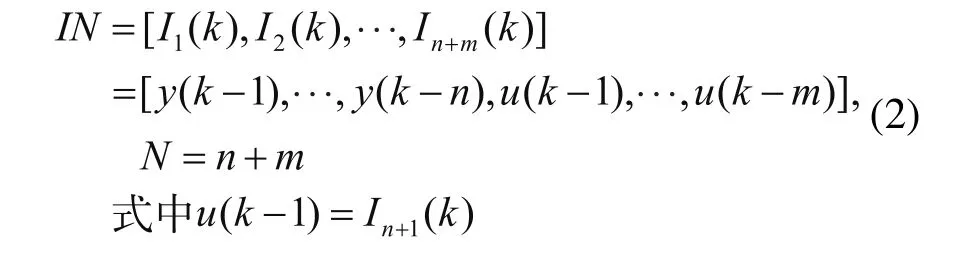
BP网络的输入为
隐层第i节点的输出为

隐层非线性作用函数为双曲正切S形函数

网络的输出(输出节点为线性)为

设目标函数为

网络权值的调整算法为

3 神经PID控制器(NNC)
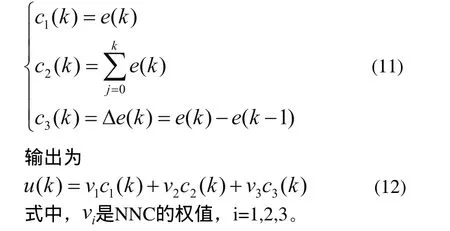
PID控制算法为

对于不确定、未知的对象与扰动,为达到系统的有效控制,在对被控对象进行在线辨识的基础上,设计参数可调整PID控制器。此时设计的是神经PID控制器,网络的权系值即表征PID控制器的三个系数,应用神经网络所具有的学习能力,当对象与扰动有变化时,辨识的对象随着变化,神经PID控制器的权系值不断的调整,从而使控制系统能适应未知环境的变化,实现有效控制。
由上所述,神经PID控制器NNC需由动态神经网络组成,其包括:数值积分器、一步滞后环节和自适应线性神经元。
由式(9)知,自适应线性神经元的输入为
设目标函数为

则NNC网络权值调整算法为

4 系统仿真分析
设被控对象的仿真模型为

作用于被控对象的扰动为
取神经网络辨识器的模型为

式中取b=1.2。

利用Matlab神经网络工具箱对该控制系统进行仿真,得到曲线图如图2~图4所示。

图2 NNI和NNC误差曲线图
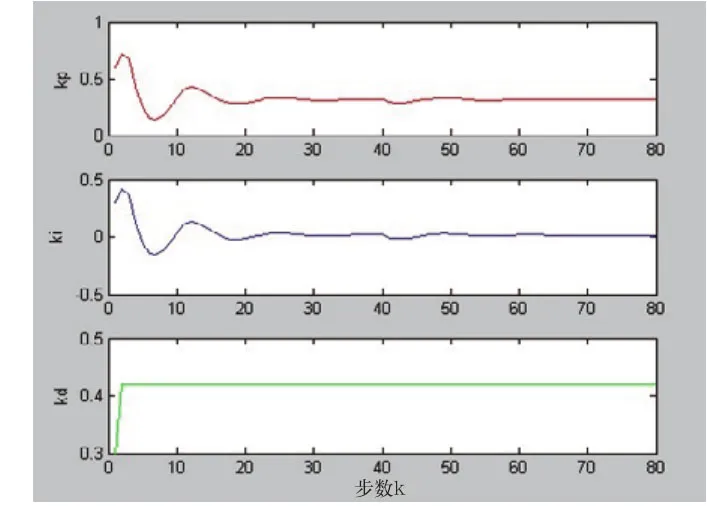
图3 控制参数整定结果曲线图
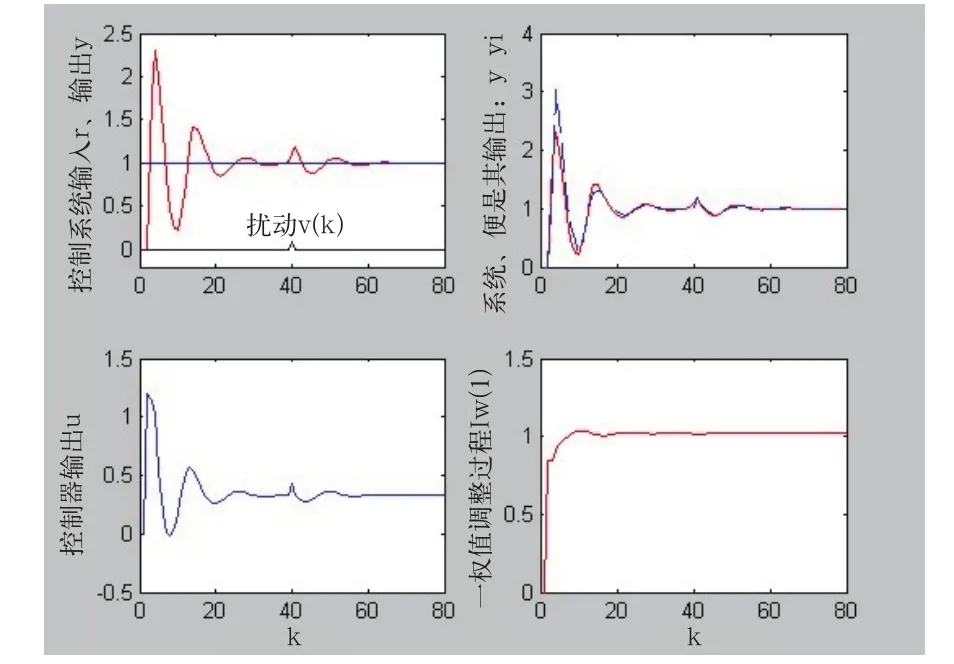
图4 控制系统输入、输出、NNI输出、NNC输出和NNI权值调整曲线图
由图2可知,对象的辨识误差和控制误差在大概30步时趋于零,在第40步有外部扰动v时,辨识误差和控制误差稍有波动,随后又快速的趋于零,鲁棒性较强,说明此时系统已经具有一定的泛化能力,能够准确辨识对象模型,并对系统进行有效控制。
由图3可知,在前30步内,PID的三个控制参数根据所选定的学习速率和加权系数不断学习训练和调整参数值的时间。在取得最优的控制参数后,系统的阶跃响应曲线的振荡幅度迅速减小。而且,当外部有干扰时,控制系统可以通过误差的反馈,经过神经网络对权值的调整,使其快速调整为最优的控制参数。
由图4左上图可知,在大概30步时,控制系统的输出趋于控制系统的输入,在40步出现扰动时控制系统的输出也产生扰动,但是随后很快逼近控制系统的输入。由图4右上图可知,系统在线辨识器(NNI)能够准确对被控对象进行在线辨识。由图4右下图可知,系统在线辨识器(NNI)的权值也随着步数而逐渐调整,外界环境有扰动时,权值并无大的波动,可以反映出系统具有一定的泛化能力,鲁棒性强。
5 结论
通过对干粉砂浆搅拌储罐湿度自动控制系统的研究与设计,将BP神经网络技术应用到干粉砂浆搅拌储罐湿度自动控制系统的系统在线辨识器(NNI)和自适应PID控制器(NNC)中,由NNI对被控对象进行在线辨识的基础上,通过对NNC的权系进行实时调整,实现PID神经网络的自学习和逼近任意函数的功能,从而进行PID控制参数的在线整定。因此,对具有时滞性、复杂的非线性特性、难以建立精确的数学模型的控制系统,神经PID控制方法是一种有效控制决策,并且其可以在实际应用中实现参数自整定,改善系统性能。
[1]孙亮,等.自动控制原理[M].北京:北京工业大学出版社,1999.
[2]薛定宇.基于MATLAB/simulink的系统仿真技术与应用[M].北京:清华大学出版社,2002.
[3]舒怀林.PID神经元网络多变量控制系统分析[J].自动化学报,1999,25(1):105-111.
[4]M.J.Willis,G.A.Montague.Auto-tuning PI(D)Controllers with Artificial Neural Networks.In Proc.12 th WCIFAC,Sydney,Australia:1993,4:61-64.
[5]S.Akhyar,S.Omatu.Self-tuning PID Control by Neural-Networks.IJCNN93-Nagoya.1993,3:1749-1752.
[6]刘金锟.先进PID控制MATLAB仿真(第二版)[M].北京:电子工业出版社,2006.
[7]黄剑平.基于BP神经网络的PID控制研究[J].计算机仿真,2010.
[8]徐丽娜.神经网络控制.[M]北京.电子工业出版社,2009.
猜你喜欢
消防界(2020年19期)2020-12-07
环球时报(2020-08-11)2020-08-11
船海工程(2017年3期)2017-07-05
科学与财富(2017年15期)2017-06-03
科技创新与应用(2017年1期)2017-05-11
科技与创新(2017年3期)2017-03-17
城市建设理论研究(2014年11期)2014-04-21
作文大王·中高年级(2007年10期)2007-11-30
