
基于物联网井下跟踪定位系统
2012-10-10 03:25:32刘向举刘丽娜
长春工业大学学报 2012年1期
刘向举, 刘丽娜
(1.安徽理工大学 计算机科学与工程学院,安徽 淮南 232001;2.安徽理工大学 测绘学院,安徽 淮南 232001)
0 引 言
煤矿安全一直都是一个十分关注的问题,煤矿井下煤尘、瓦斯、潮湿等恶劣环境时刻都在威胁井下工作人员的生命安全,尤其是在井下发生事故时,由于无法获得井下人员的具体位置,而不能拿出切实有效的救援方案,经常造成人员的伤亡。所以,建立实用可靠的煤矿井下人员跟踪定位系统对煤矿的安全生产管理有着重要的现实意义。
在国外,煤矿井下人员的跟踪定位通常是通过红外等无线方式经过泄漏电缆传送数据到井上,井上的计算机通过对收到的数据进行处理,从而判断井下人员所处的位置。美国、日本等国家的一些煤矿已经实现了全矿井下人员的跟踪定位,但这些方式造价通常都很高[1]。目前,在国内所使用的井下人员定位技术多数实际上仅仅是一种考勤系统,并非真正的人员定位跟踪系统。
针对传统方法的不足,文中设计的基于物联网技术的井下人员跟踪定位系统,该系统具有抗干扰能力强、可靠性高、成本低、人员定位准等特点,能够及时、准确地将井下各个区域人员的动态情况反映到地面计算机系统,使管理人员能够随时掌握井下人员的分布状况和每个下井人员的入井、升井时间及运动轨迹,以便于进行更加合理的管理。对煤矿安全管理具有显著的社会效益和经济效益。
1 物联网概述
物联网概念是在互联网概念的基础上,将其用户端延伸和扩展到任何物品与物品之间,进行信息交换和通信的一种网络概念,是MIT Auto-ID中心Ashton[2]教授1999年在研究RFID时最早提出来的。
2 系统设计
2.1 系统硬件结构
本系统具有自动识别、智能定位等功能。该系统的主要硬件包括Sink节点、读卡器、电子标签、主控网络和物联网控制平台5部分。系统结构如图1所示。
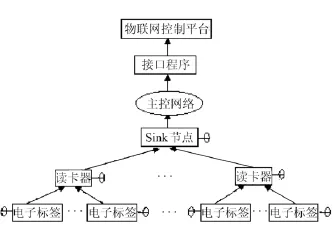
图1 系统结构
具体工作过程为:当井下人员进入到无线网络范围时,读卡器读取井下人员随身携带的电子标签中的信息,对信息进行分析处理后,将人员的身份、所处位置等信息以无线的方式传送给Sink节点。Sink节点经过主控网络以有线的方式传送到上位机,上位机对信息进行处理,通过可视化的界面在屏幕上显示井下人员的位置。
2.2 系统Sink节点设计
Sink节点作为网络的一个节点发起一个网络,之后的节点用自组织的方式来加入,网络中的所有节点都是全功能设备。Sink节点的硬件模型如图2所示。

图2 Sink节点结构图
它是由CC2430、CAN控制器 MCP2515、CAN总线收发器TJA1050、光耦和无线耦合、匹配模块组成。
CC2430是一个真正的系统芯片(SoC)CMOS解决方案。这种解决方案能够提高性能并满足2.4GHz ISM波段应用,以及对低成本、低功耗的要求。在发射和接收模式下,电流损耗分别低于25mA和27mA,在2.4GHz频段,其灵敏度达-91dBm,最大传送速率为250kB/s,最大 输 出 为 +0.6dBm[4-5]。MCP2515 是 具 有SPI接口的独立CAN控制器,它完全支持CAN V2.0B技术规范,通讯速率最高可达1Mb/s;低功耗的CMOS技术,工作电压在2.7~5.5V,典型工作电流为5mA,典型待机电流为1μA[6];它的SPI接口时钟频率最高可达10MHz,可满足一个SPI主机接口扩展多路CAN总线接口的需要。为了增强CAN总线节点的抗干扰能力,MCP2515与CAN总线收发器(TJA1 050)之间采用高速光耦(6N137)进行完全的电器隔离,而且光耦电路所采用的两个电源VCC和VDD也必须完全隔离。
2.3 读卡器设计
读卡器的硬件结构如图3所示。
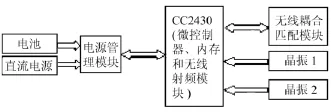
图3 读卡器结构图
它也是由CC2430、无线耦合、匹配模块、电源管理模块和晶振组成。电源管理模块负责给监测节点的各个模块供电。终端节点一般采用电池供电,在休眠模式时仅0.9μA的流耗,可用外部中断或定时中断RTC唤醒系统;待机模式时的电流消耗少于0.6μA,也可以用外部中断唤醒系统,可以保证电池工作很长时间。
1984年,我把几经省内外好几家刊物退稿终于下决心重写的《惊涛》交付《人民文学》,发表时他们加了整页面篇幅的《编者按》,文字滚烫,激情洋溢。而溢于言表的,是扶持作者的拳拳之心、款款深情。我至今不知道这些文字出于谁人之手,我能感到的是那双手的有力一握。即便是像《庐山瀑布云》这样发在地方刊物的小短篇,已经退休的老主编崔道怡也赶紧推荐给了《新华文摘》。涂光群在将近三十年后还把我自己几乎忘记的《唱歌吧桦树林》收进他主编的小说集。
读卡器实现对电子标签上数据的采集,并通过无线方式将信息发送给Sink节点,同时,也可承载其它读卡器数据信息的中继转发功能。读卡器的安装位置主要选择在人员出入的井口和井下主要巷道的分岔口等关键部位,其数量和密度的大小取决于对定位精度的要求,特别是在环境较为复杂的区域,可通过增加节点的密度来提高定位精度。通常情况下,根据现场实际情况的需要,读卡器的间距在200m左右,工作面距离则可降低为50m,在坑道适当位置[1]。另外,对于读卡器防爆、防湿、防尘等保护工作要做好。
2.4 主控网络
主控网络采用CAN总线传输协议。现在大多数矿井采用成本比较低的RS-485总线,但在通信可靠性和速率上,485总线难以适应井下用电设备频繁启动和复杂的电气干扰环境。在通信方式上,485为主从方式,不利于系统设备的扩充,因此,本系统采用CAN总线方式进行数据传输。CAN总线是一种多主总线,即每个节点机均可成为主机,且节点机之间也可进行通信。CAN协议采用CRC检验并可提供相应的错误处理功能,保证了数据通信的可靠性[7];CAN总线的数据长度最多为8个字节,8个字节不会占用总线时间过长,从而保证了通信的实时性;当信号传输距离达到10km时,CAN总线仍可提供高达5kbit/s的数据传输速率;因而非常适合于构建复杂现场的实时测控网络。由于主控计算机上一般不提供CAN总线通信接口而通常提供RS-232通信接口,所以,必须通过RS-232/CAN总线转换器进行RS-232与CAN总线之间的信号转换。
主控网络布线结构如图4所示。
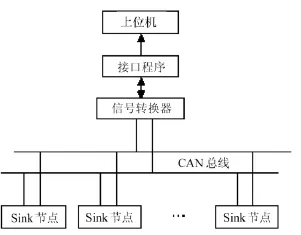
图4 主控网络布线结构
图4由上位机、信号转换器和Sink节点3部分组成。读卡器采集到的数据传给Sink节点,Sink节点又把数据通过主控网络传给信号转换器,最后通过接口程序传给上位机。
3 系统软件设计
3.1 Sink节点软件设计
Sink节点程序主要包括主程序模块、数据采集模块、看门狗模块、中断模块、数据发送模块、CAN控制模块等。Sink节点的程序流程如图5所示。
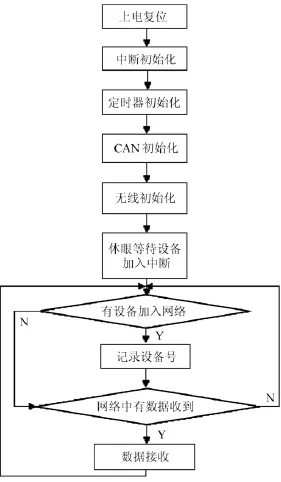
图5 Sink节点软件流程图
上电复位后,首先执行中断初始化、无线初始化、CAN初始化、定时器初始化,然后进入休眠状态,等待加入网络中断的产生。一旦有设备加入网络,Sink节点开始进入工作状态,记录加入设备的编号,然后开始接收数据。
3.2 读卡器软件设计
读卡器程序主要包括数据采集模块、看门狗模块、中断模块、数据发送模块等。读卡器节点的程序流程如图6所示。

图6 读卡器流程
上电复位后,首先执行中断初始化、无线初始化,然后进入休眠状态,等待中断的产生。当接收到电子标签中断信号后,读卡器被唤醒进入工作状态,开始接收电子标签中的数据并计算出电子标签的位置,将计算结果存储起来,然后向Sink节点发送加入网络中断信号,请求Sink节点接收数据。内部定时器完成喂狗信号和时间调度。
4 井下人员定位方法
接收信号强度指示定位方法(RSSI)就是在已知发射节点的发射信号强度的前提下,根据接收到的信号强弱计算出信号的传播损耗,再利用理论和经验模型计算出信号发射点与接收点的距离。
在无线通信技术中,根据节点是否已知自身的位置,把传感器网络节点分为锚节点和盲节点,如图7所示。
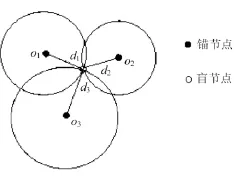
图7 三边测距法确定未知节点的位置
其中锚节点是一个静止的知道自己位置的节点,可通过GPS定位设备精确测定。锚节点必须正确配置,它的任务是提供一个包含自己位置x,y坐标和RSSI值的信息包传送给盲节点。盲节点根据接收到信号的强度RSSI,利用信号传播理论和信道经验模型计算出相对于该参考节点的距离,接收信号强度和发射器与接收器之间距离的函数可表示为[9]:

式中:PR——无线信号的接收功率;
A——距离为1m时的接收信号强度;
d——收发单元之间的距离;
λ——传播因子,λ的数值大小取决于无线信号传播的环境;
10lgPR——接收信号功率转换为dBm的表达式。
得到锚节点与盲节点之间的大概距离后,采用三边测距法[7]计算出盲节点的位置。三边计算的理论依据是在三维空间中,通过知道一个电子标签设备到3个读卡器的距离来确定该点的坐标。在二维平面上用几何图形表示出来的三边测距法的意义是:当得到未知节点到一个锚节点的距离时,就可以确定此未知节点在以此锚节点为圆心、以距离为半径的圆上;得到未知节点到3个锚节点的距离时,3个圆的交点就是未知节点的位置(其理论模型见图7)。
5 结 语
井下人员定位是煤矿安全生产的重要保证。为此,提出了基于物联网技术,采用有线和无线相结合的方式来实现井下人员定位系统,这样不仅节约了成本,而且适合井下的特殊环境。整个通信系统各功能模块实现独立,便于实际应用与功能扩展。与传统的定位系统相比,具有稳定性强、覆盖范围大等特点。系统经过仿真和现场调试证明,该系统达到了预期的目标,具有较高的经济价值和广阔的应用前景。
[1]谢晓佳,程丽君,王勇.基于ZigBee网络平台的井下人员跟踪定位系统[J].煤炭学报,2007,32(8):884-888.
[2]刘强,崔莉,陈海明.物联网关键技术与应用[J].计算机科学,2010,37(6):1-5.
[3]孙其博,刘杰,黎葬,等.物联网:概念、架构与关键技术研究综述[J].北京邮电大学学报,2010,33(3):1-9.
[4]Texas Instrument.CC2420,2.4GHz IEEE 802.15.4/ZigBee-ready RF Transceiver [EB/OL].(2011-06-08)[2011-03-10].http://www.eetasia.com/DATASHEET/DETAIL/CC2430-1000044197.HTM.
[5]Texas Instrument.CC2430,A true system on chip solution for 2.4GHz IEEE 802.1 5.4/ZigBeeTM[EB/OL].(2011-06-08)[2011-03-10].http://www.eetasia.com/DATASHEET/DETAIL/CC2430-1000044197.HTM.
[6]Microchip Technology Inc.,MCP2515data sheet[EB/OL].(2011-06-08)[2010-11-16].http://www.microchip.com.
[7]王磊,闫厉,田丽媛.CAN总线技术在汽车网络中的研究与实现[J].长春工业大学学报:自然科学版,2007,28(4):402-406.
[8]朱斌,谭勇,黄江波.基于ZigBee无线定位技术的安全监测系统设计[J].测量与控制,2010,18(6):1247-1252.
[9]方震,赵湛,郭鹏,等.基于 RSSI测距分析[J].技术学报,2007,20(11):2526-2530.
猜你喜欢
电脑爱好者(2020年17期)2020-09-14 12:12:41
测控技术(2018年6期)2018-11-25 09:50:12
测控技术(2018年8期)2018-11-25 07:42:08
时代英语·高二(2017年4期)2017-08-11 11:54:16
解放军健康(2017年5期)2017-08-01 06:27:44
电子技术与软件工程(2016年24期)2017-02-23 13:35:11
中国公共安全(2017年11期)2017-02-06 05:28:03
武夷学院学报(2015年3期)2015-07-18 11:03:48
电子设计工程(2015年8期)2015-02-27 12:05:26
河南科技(2014年16期)2014-02-27 14:13:22
