
基于高斯函数及分批估计融合理论的无线网络定位算法
2012-10-10 03:25:32马春龙张启英
长春工业大学学报 2012年1期
马春龙, 张启英
(长春大学光华学院 信息工程学院,吉林 长春 130031)
0 引 言
近几年,国内外无线传感器网络技术得到了飞速的发展,特别是在国内,由于无限传感器网络技术是中国政府支持发展的主要方向,因此,无线传感器网络技术也被应用在各个领域,其中,无线传感器网络定位技术被应用于人员、物品的定位及管理。而在国外,采用无线传感器网络实时定位系统的企业越来越多,仅2010年一年的时间,在企业数量上就比往年增长了3倍之多。与此同时,关于无线传感器网络定位算法的研究也得到了很大的发展,特别是近几年提出了许多新颖的解决方案和思想,根据具体的定位机制,可以将现有的无线传感器网络人员定位算法分为两类:一是基于测距的(Range based)定位算法;二是无需测距的(Range free)定位算法。Range based定位算法需要测量盲节点与参考节点之间的距离或角度信息,然后使用三边测量、三角测量等方法计算盲节点的位置。文中采用基于测距的定位算法,距离的测量是通过测量目标节点和参考节点之间传输信号的RSSI值来实现的,而传输信号的RSSI值容易受到外界随机干扰的影响,导致测量的距离值不准确而产生定位误差。因此,剔除采集到信号中的RSSI值的干扰量对提高定位精度具有重要意义[1]。
1 系统的总体设计
1.1 定位系统结构
基于无线传感器网络的定位系统主要由无线传感器网络目标节点、参考节点、汇聚节点及控制中心计算机组成,系统结构如图1所示。
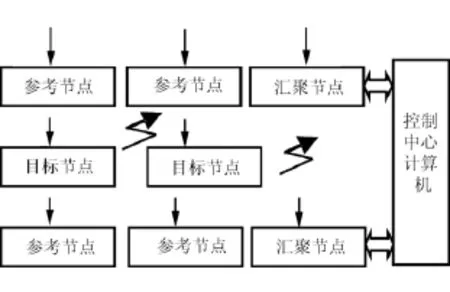
图1 定位系统结构
1.2 各节点硬件电路
各节点硬件电路的控制芯片选用CC2430/1,CC2430芯片为Chipcon公司生产的2.4GHz射频系统芯片。该单芯片上整合了ZigBee RF前端、内存、微控制器。
其主要特点如下:高性能和低功耗的8051微控制器核;集成符合IEEE 802.15.4标准的2.4GHz的RF无线电收发机;在休眠模式时仅0.9μA的流耗,外部的中断或RTC(实时时钟)唤醒系统,在待机模式时少于0.6μA的流耗,外部的中断能唤醒系统,满足无线网络传感器节点低功耗的要求。较宽的电压范围(2.0~3.6V);具有电池监测和温度感测功能;集成了14位ADC;带有2个 USART 等[2-3]。
1.3 基本工作情况
该系统以3~12(最多16个)个参考节点(Reference Node)构成一个最大区域为60m×60m的无线定位网络。参考节点之间通过802.15.4/ZigBee无线通讯标准保持无线联系,通过上位机软件可以实现对全部参考节点的无线参数配置。
对于一个定位应用来说,参考节点的位置是已知的,并且它是静止的,可以在被请求时告诉其它节点它的坐标。目标节点(以CC2431芯片为核心)是移动的节点,它安装在定位目标上,由电池供电。当目标节点进入由参考节点、汇聚节点等组成的监控网络时,就会向参考节点发出RSSI请求,并将接收到的RSSI根据高斯分布函数及分批估计融合理论的定位算法计算处理,然后,将其送入CC2431硬件引擎自动计算自己的位置坐标,准确定位,并将定位信息和目标节点ID等信息实时无线发送给上位机。
1.4 上位机定位软件
基于VB环境,编写了上位机定位软件。
2 传统定位算法
2.1 RSSI测距法
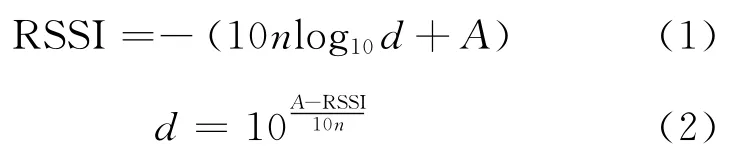
式中:n——信号传播常数;
d——与参考节点的距离;
A——距离参考节点1m的接收信号强度。
RSSI测距法比较简单,但是,由于实际环境中温度、多径效应等条件容易发生变化,使得计算出的距离有很大误差。
2.2 三角形质心定位法
三角形质心定位算法是:参考节点p1,p2,p3在目标节点的请求下,分别周期性地发出自身的位置信息,目标节点接收参考节点携带了位置信息的RSSI。并根据式(2)分别计算出3个参考节点到目标节点的距离d1,d2,d3,再分别以3个参考节点为圆心,d1,d2,d3为半径画圆,通过计算相交圆的交点及由交点组成的三角形的质心来估算目标节点的坐标,使目标节点的坐标值更准确[4]。
2.3 传统模型分析RSSI
随机数模型是指当目标节点采集到一个RSSI值,则马上进行定位计算,该模型优点在于定位实时、运算量小,适用于处理速率较低的硬件平台,但在实际定位环境中,RSSI值极易受到外界干扰,该模型也容易受到外界干扰。
统计均值模型是目标节点采集一组n个RSSI值,然后求这些数据的均值,该模型可以通过调节n来平衡实时性与精确性,当n很大时,可以有效解决定位数据随机性误差问题,计算量会相应增加,但外部扰动较大时,该模型的定位精度也不高[4]。
3 基于高斯分布函数及分批估计融合理论的定位算法
3.1 基于高斯分布函数的RSSI数据处理
3.1.1 关于高斯分布函数
高斯分布即正态分布(normal distribution),是一种概率分布。第一参数μ是服从正态分布的随机变量的均值,第二个参数σ2是此随机变量的方差,所以正态分布记作N(μ,σ2)。服从正态分布的随机变量的概率规律为取μ邻近值的概率大,而取远离μ值的概率小;σ越小,分布越集中在μ附近,σ越大,分布越分散。正态分布的密度函数的特点是:关于μ对称,在μ处达到最大值,在正(负)无穷远处取值为0,在μ±σ处有拐点。它的形状是中间高两边低,图像是一条位于x轴上方的钟形曲线,正态分布的密度函数表达式如下:

3.1.2 高斯模型处理RSSI的可行性
当目标节点在同一位置接收n次参考节点发来的RSSI值时,必然存在一些由于干扰而带来的RSSI值的突变,但这是一个小概率事件,大部分采集来的RSSI值还是应该在平均值附近,因此,参考节点发来的RSSI值(随机变量X)的概率服从高斯分布,即X~N(μ,σ2),因此,RSSI数据可以用高斯模型处理,其密度函数为式(3)。
在式(3)中:
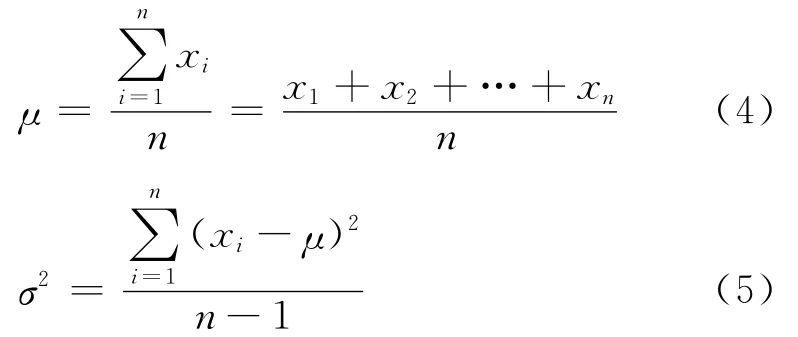
式中:xi——第i个信号强度值;
n——接收到的RSSI值个数。
3.1.3 用高斯模型处理数据方法
一个目标节点在同一位置收到的n个RSSI,其中,由于外部干扰的存在,必然存在着小概率事件,通过高斯模型选取高概率发生区的RSSI值,这种做法减少了一些小概率、大干扰事件对整体测量的影响,增强了定位信息的准确性。
高斯模型解决了RSSI在实际测试中易受干扰、稳定性差等问题,提高了定位精度,但是高斯模型只能消除小概率短暂的扰动,下面在用高斯模型处理RSSI数据的基础上,再利用单传感器分批估计融合理论对数据进行融合以期获得RSSI最优值[4]。
3.2 单传感器分批估计融合理论
3.2.1 算法的基本思想
提高单传感器测量精度对整个检测系统来说是至关重要的,因此,必须对单传感器所测量的数据进行处理。一个参数有多个样本观测值是数据处理中常见情况,在工业测量过程中,传感器参量相对于系统采样频率而言,一般是缓慢且具有正态分布的。将等精度测量数据分成两组 (按照先后或者奇偶分组),根据分批估计理论可以得到测量数据的融合值[5-6]。
3.2.2 单个传感器融合值的确定
将单只传感器的n个观测值x划分成x11,x12,…,x1k和x21,x22,…,x2m,其中,k+m=n,(k,m≥2)。两组样本所对应的平均值分别为:
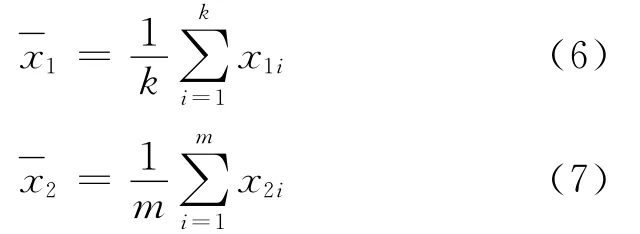
样品方差分别为:


x的融合值和方差是:
3.3 定位算法
定位算法过程如下:
1)初始化各节点。
2)参考节点根据目标节点的请求向目标节点发送带有位置坐标的信息,目标节点在收到RSSI值信息后,将其值记录到对应的RSSI数组Beacon-val[n0]中,n0为选取记录的数据个数。
3)目标节点运用高斯分布函数处理RSSI值,根据文中所研究的人员、物品定位系统的应用环境的总体情况,选择0.5为临界点,也就是说,当高斯分布函数值大于0.5时,认为对应的RSSI值为高概率发生值,小于或等于0.5所对应的RSSI值时,认为是小概率随机事件,通过式(4)与式(5)可以求出μ与σ[2]。

由式(12)可以确定RSSI的选值范围,按照此范围目标节点从收到的n0个RSSI数据中选值,并存放到数组 Beacon-val-gaosi[n],n<n0中。
4)应用单传感器分批估计融合理论,对经过高斯函数选取过的数组gaosi[n]中的RSSI值进行融合处理,数组 Beacon-val-gaosi[n]中n为高斯筛选后入选RSSI的个数。根据式(6)~式(11)得出的RSSI优化值为:

5)目标节点判断收到的参考节点的个数是否超过3个,如果超过,则不再接收参考节点的信息,否则继续接收。
6)用式(13)算出的RSSI值,根据式(2)算出目标节点到3个参考节点间的距离,再根据三角形质心定位法算出目标节点的坐标。
7)将算出的目标节点坐标经汇聚节点实时上传到控制中心计算机[7-8]。
4 实 验
4.1 测试模型建立
该系统以3个参考节点(Reference Node)构成边长为60m的无线定位网络。节点之间通过802.15.4/ZigBee无线通讯标准保持无线联系,通过上位机软件可以实现对全部参考节点的无线参数配置(例如,对参考节点的坐标配置)。
4.2 测试数据记录及结果
测试数据记录见表1。
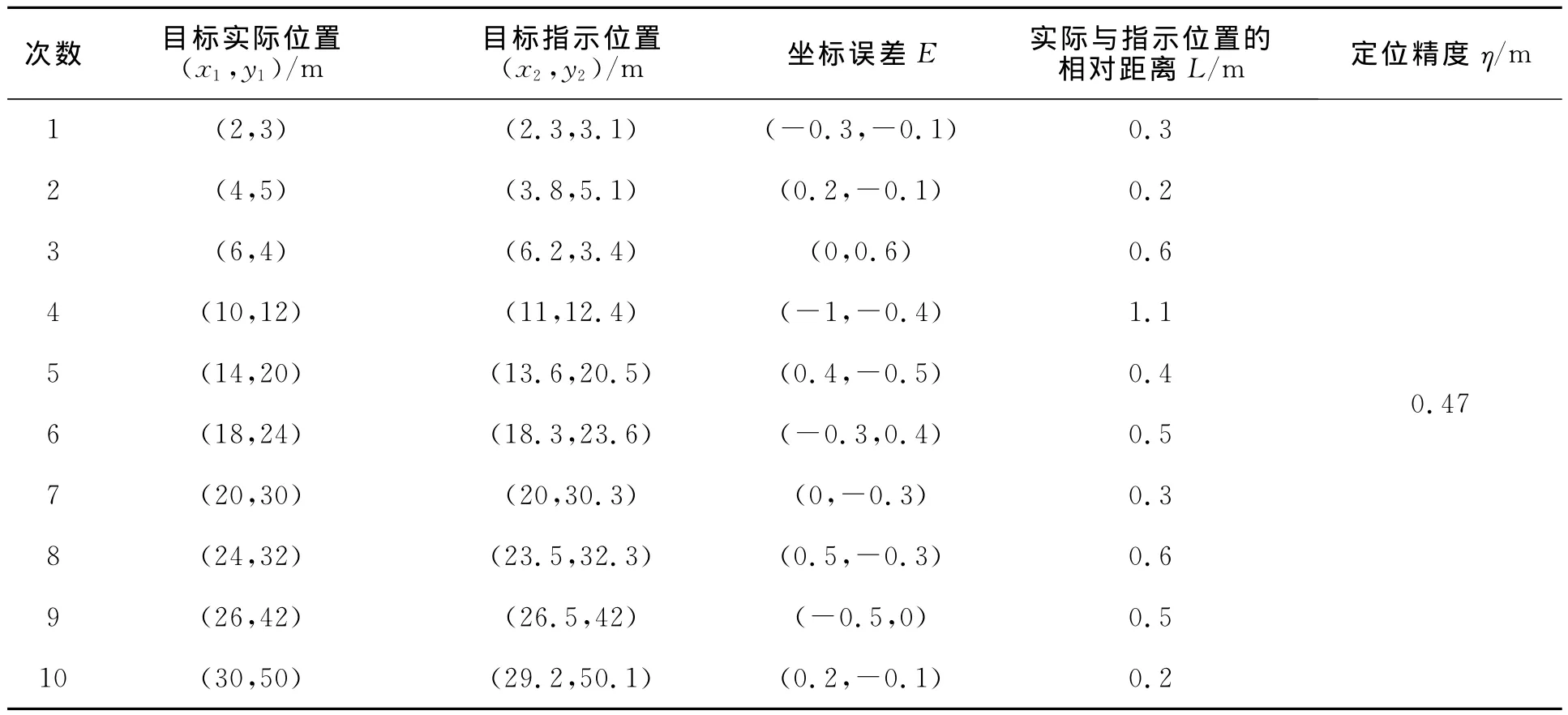
表1 测试数据记录
表中实际位置与指示位置的坐标误差为

实际位置与指示位置的相对距离误差为

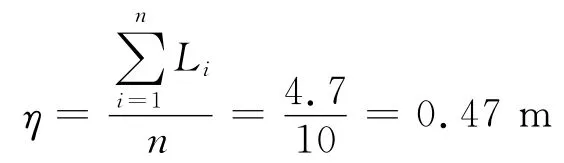
η为定位精度,定位精度测算公式如下:

式中:n——测量次数;
Li——第i次实际位置与指示位置的相对距离误差。
综上所述,定位精度为:
5 结 语
在基于测距的定位算法中,为解决传输信号的RSSI值容易受到外界随机干扰的影响,导致测量的距离值不准确而产生定位误差的问题,文中提出了一种基于高斯分布函数及分批估计融合理论的无线传感器网络定位算法。该算法首先采用高斯模型分析RSSI,通过高斯模型剔除小概率事件RSSI的值,消除随机干扰;然后再运用单传感器分批估计融合理论计算高概率事件RSSI的值作为最终定位运算用的RSSI值,并将其送入目标节点CC2431的硬件引擎,确定目标节点的坐标。实验证明,采用该种算法,系统定位精度能够提高到0.5m以内,满足物品定位精度的要求。
[1]张清国,黄竟伟,王敬华,等.一个新的无线传感器网络节点定位算法[J].小型微型计算机系统,2009(3):461-462.
[2]Ma Chunlong,Li Xiaoguang,Li Zhaoxi.Design of gas information collection and control system based on GPRS[C]// MEC,2011:1222-1224.
[3]何大宇,韦铱,徐英鹏.ZigBee无线传感网络的医疗应用研究[J].长春工业大学学报:自然科学版,2010,31(3):355-359.
[4]朱剑,赵海,孙佩钢,等.基于RSSI均值的等边三角形定位算法[J].东北大学学报:自然科学版,2007,28(8):1095-1096.
[5]Chunlong Ma,Jianguo Li,Shuhan Yu.Method of soil electrical conductivity measurement based on multi-sensor data fusion[C]// MEC,2011:1219-1221.
[6]Chunlong Ma,Shuyan Zhang,Jinli Wang.Electronics engineer combat training[M].Changchun:Jilin Publishing Group Press.,2010:253-260.
[7]付华,胡雅馨.无线传感器网络中基于RSSI的质心定位算法[J].微计算机信息,2010,26(8/1):19-20.
[8]王建宏,杜世顺.基于无线传感网络的井下区域定位算法[J].煤矿机械,2010,31(12):189-190.
猜你喜欢
数学小灵通(1-2年级)(2024年4期)2024-05-14 09:30:52
无线互联科技(2021年4期)2021-04-21 10:12:36
数字通信世界(2021年3期)2021-04-09 02:05:00
湖北理工学院学报(2020年4期)2020-08-22 06:43:26
小学生学习指导(低年级)(2019年6期)2019-07-22 03:33:10
小猕猴智力画刊(2019年3期)2019-04-19 00:01:52
电子制作(2018年23期)2018-12-26 01:01:08
计算机应用与软件(2017年4期)2017-04-24 10:39:07
电子制作(2016年15期)2017-01-15 13:39:03
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:36
