基于工业以太网的船舶综合平台管理系统
2012-10-08 08:52:32林建辉陈松涛
江苏船舶 2012年2期
林建辉,陈松涛
(1.中海油能源发展股份有限公司,天津558151;2.镇江市赛尔尼柯自动化有限公司,江苏 镇江212009)
1 平台系统的任务
船舶作为一个水面或水中的功能搭载平台,在功能上主要分为2大系统,即“功能系统”和“平台系统”。
由于船舶自动化的发展和船舶操纵能力、生存能力,可靠性、可维护性、经济性的需要,传统做法将各自独立的船、机、电和与船舶相关的系统,从功能上综合为一个系统,成为平台系统。平台系统主要包括:推进系统、电站系统、功率管理系统、辅机系统、阀门液位遥测系统、机舱综合监测与报警系统、桥楼系统、通导系统。
平台系统的任务是:
(1)支持并保障功能船舶系统完成其功能,保证功能系统的有效性。
(2)控制船舶平台在海上作规定的运动,并保持其生存能力。
(3)为舰员提供适宜的工作、生活条件和安全保障,以保持船员的体力。
(4)为船舶设计、建造提供经济、弹性的电气控制方案。
(5)为船舶的全寿命周期的平台功能提升,提供技术基础保障。
2 船舶综合平台管理系统的组成
随着网络化、信息化概念向自动化领域的不断渗透,船舶自动化控制理念和技术也在不断发展。上世纪末现场总线控制系统替代了传统的集中式控制系统,上位机+PLC或专用采集控制器+现场总线构成的集散监控系统成为船舶自动化系统的主流。但由于制造商的不同应用而派生出的各种不同的现场总线标准之间互不兼容,严重束缚了不同设备之间的通信,使得船舶设备间的信息共享受到了限制,将各个子系统综合成一个系统障碍重重。目前以太网技术得到了迅速,它不仅在办公自动化领域并且在工业自动化、船舶领域得到了广泛应用,许多控制器、PLC、智能仪表和执行器已经带有以太网接口。这些都标志着工业以太网已经成为真正开放互连的工业网络的发展方向,它将对船舶自动化技术产生很大的影响。
本文介绍的新型船舶综合平台管理系统是一基于工业以太网及ModBus TCP/IP的模块化设计的系统。针对各种不同船型,适合船舶检验技术要求,模块化的设计可以灵活方便的配置最优方案。为了获得更高的可靠性及网络性能,网络结构采用带冗余功能网络。
硬件系统采用国际著名制造商定制的海事标准模块,既满足通用化、标准化的要求,又符合IEC标准及各船级社要求。
在国外公布的新型控制系统及本文介绍的新型船舶综合平台管理系统,成功地应用了上位机+PLC+工业以太网构成的分布式监控系统。实践证明,这样的控制系统对船舶控制来说是先进、安全、可靠和经济适用的,为船舶自动化控制技术实施提供一种可行的方案。
3 基于工业以太网的Modbus TCP/IP网
3.1 工业以太网的优点
工业以太网是基于IEEE 802.3的区域和单元网络,从逻辑上可把商用网和工业网看成是同一个以太网,用户可根据现场情况,灵活配置自己的网络部件。但从船舶环境的恶劣和抗干扰的要求方面来说,技术人员希望采用通用的以太网芯片和媒介,兼顾考虑船舶的特殊要求,如:高温、潮湿、振动、抗电磁干扰和抗辐射,能满足EN50081-2、EN50082-2标准,而办公室级别的产品未经这些工业标准测试,表1列出了一些常用工业标准。为改善抗干扰性和降低辐射,工业以太网产品多使用多层线路板或双面电路板,且外壳采用金属屏蔽干扰。对于电源,因集线器、交换机、收发器多为有源部件,而现场电源的品质无法满足要求,故常采用双路直流电为其供电。另外考虑方便安装,工业以太网产品多数使用DIN导轨或面板安装。通信介质选择,在办公室环境下多数配线使用UTP(五类网线),而在船舶环境下则使用(STP(带屏蔽双绞线)和光纤。
4.3.3 切口局部浸润麻醉:切口局部浸润麻醉也常作为剖宫产术后伤口疼痛的有效镇痛措施之一, 因其实施简便,效果确切,对设备依赖性较低,经常为临床麻醉医生所采用,可减少静脉镇痛药用量,降低镇痛相关不良反应的发生,增加患者镇痛满意度。但对于已使用椎管内阿片药物镇痛复合非甾体药物或对乙酰氨基酚镇痛时,伤口浸润效果甚微。术前、术后均使用伤口浸润阻滞,比单个使用可提供更好镇痛效果。置管后持续伤口浸润可提供更好的镇痛效果,可减少患者术后疼痛评分,减少阿片类药物使用,降低恶心呕吐发生率。临床经验表明,若持续泵入局麻药,筋膜下置管效果比筋膜上或皮下置管效果好[21]。
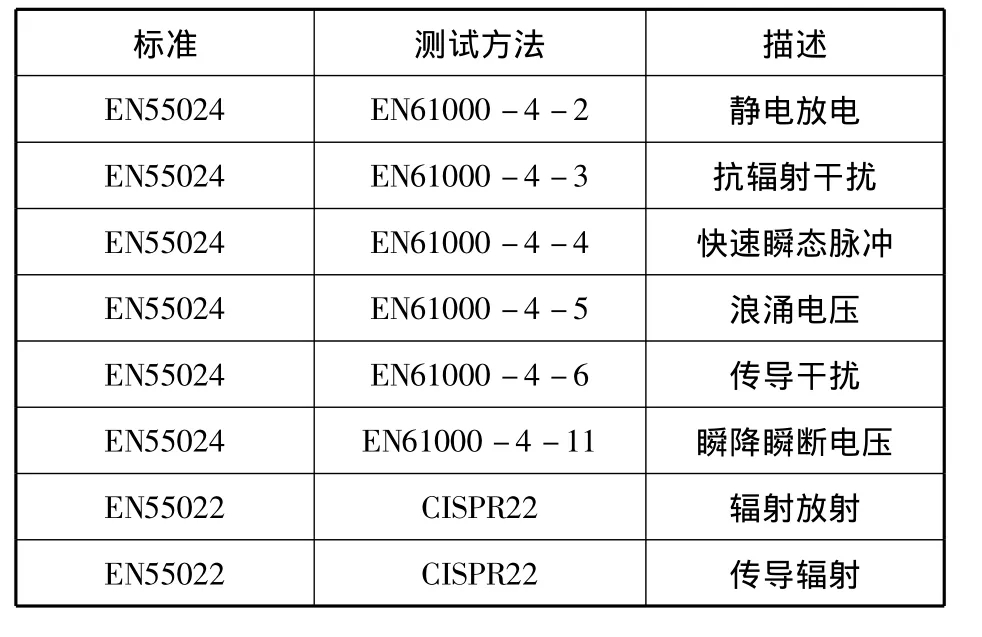
表1 常用工业标准
工业以太网具有以下优点:
(1)应用广泛。以太网是应用最广泛的计算机网络技术,几乎所有的编程语言如Visual C++、Java、VisualBasic等都支持以太网的应用开发。
(2)通信速率高。10、100 Mb/s的快速以太网已开始广泛应用,1 Gb/s以太网技术也逐渐成熟,而传统的现场总线理论最高速率只有12Mb/s。显然,以太网的速率要比传统现场总线要快的多,完全可以满足工业控制网络不断增长的带宽要求。
(3)资源共享能力强。随着Internet/Intranet的发展,以太网已渗透到各个角落。网络上的用户已解除了资源地理位置上的束缚,联入互联网的任何一台计算机都能浏览工业控制现场的数据,实现“控管一体化”,这是其他任何一种现场总线都无法比拟的。
(4)可持续发展潜力大。以太网的引入将为控制系统的后续发展提供可能性,用户在技术升级方面无需独自的研究投入。对于这一点,任何现有的现场总线技术都是实现的。同时,智能技术的发展都要求通信网络具有更高的带宽和性能,通信协议有更高的灵活性,这些要求以太网都能很好地满足。
3.2基于以太网的TCP/IP网
IP-Internet Protocol(网络之间互连的协议)是Internet最基本的协议。IP层的主要目的是找到IP报文的“下一个连接点”,它可以是路由器、计算机、控制器,甚至是I/O,关键是这个设备必须有自己的IP地址。
TCP是使用端口(Socket)号把信息传到上层软件,为用户提供不同的服务,端口号用来跟踪同一时间内通过网络的不同会话。常用的端口见表2。

表2 常用端口号
把以太网物理层和数据链路层加到OSI(Open System Interconnect,开放式系统互联)的模型之中,就构成了基于以太网的TCP/IP网,如图1所示。
3.3 标准和开放的Modbus TCP/IP
由于Modbus主/从通信机理能很好地满足确定性的要求,非常适合以太网中的客户机/服务器的通信机理。1996年施耐德公司推出了基于以太网TCP/IP的Modbus协议,即Modbus TCP/IP协议,它能在收到经网络传来的错误数据的情况下,通过应答与重传机制来保证传输过程中的可靠性。在工业自动化领域中,此协议具有很高的性能价格比,是一种真正开放的解决方案,目前已经是世界上最主要的工业以太网协议。

图1 基于以太网的TCP/IP网
Modbus是开放的协议,IANA(Internet Assigned Numbers Authority,互联网编号分配管理机构)给Modbus协议赋予TCP编口号为502,这是目前在仪表与自动化行业中惟一分配到的端口号。
Modbus TCP/IP使用以太网 OSI模型中的5层,见表3。

表3 Modbus TCP/IP OSI模型
第1层:物理层。提供设备的物理接口,与市售的介质/网络适配器相兼容。
第2层:数据链路层。格式化信号到包含源/目的硬件地址的数据帧。
第3层:网络层。实现带有32位IP地址的IP报文包。
第4层:传输层。实现可靠性连接,传输,查错,重发,端口服务,传输调度等。
第5层:应用层。Modbus协议报文。
实际应用中,在设备层、控制层和信息层中都可以采用Modbus TCP/IP技术,能在监控室或远程浏览连接到网络的所有设备和智能传感器。由于以太网已得到广泛地应用,技术成熟,设备成本低,使系统具有可延伸性、灵活性和高性能价格比等特点。
4 系统网络结构
船舶的特殊性,一般设有2个或多个监控中心,如:桥楼驾驶室、机舱集控室、货控室等,数据采集主要分布于船舶主甲板及以下区域。虽然最远的2个站之间的距离不超过500 m,但船舶设备密度大,电磁兼容及环境条件恶劣。考虑到现场总线通信的局限性和工业网络的发展趋势以及系统的可升级性,整个系统采用带冗余功能的光纤工业以太网作为主要的介质。
本文介绍的船舶综合平台管理系统,以海洋平台工作船为对象,全系统包含以下分系统:AMS机舱综合检测与报警系统、液位遥测及阀门遥控系统、PMS电站功率管理系统、CCTV视频监视系统、VMS船舶管理系统等。其中,AMS系统包含了主推进系统、副机系统、辅机等的信号采集及监测。系统通过带冗余的光纤环网,对各个子系统进行联结,实现信息交换。全船网络在舵机舱、机舱、机舱集控室、桥楼驾驶室等处设置主干网络节点,通过各个主干网络节点连接各分支及子系统,这样就构成了一个可以覆盖全船的以太网。系统网络结构如图2所示。
系统主干网络采用通过船检型式认可试验的工业以太网交换机,构成1 000 Mbps以太网光纤环(大环)。根据船级社规范要求,相关联的各个分系统必须独立自成系统,因此各个分系统网络结构完全依据其型式认可试验时的网络结构,通过环形工业以太网联结进行数据交换,从而构成一个既能满足船舶海事规范要求,又能满足功能性能及功能要求的全船信息网络。
考虑船舶电磁环境恶劣,传输距离长,环形主干线路均采用单模光纤,网络交换机分别带有2个内置的1 000 Mbps单模光纤口,传输所用的光波波长为1.31 μm。在各网络节点,采用星形拓扑结构将本地设备及子系统,如:计算机、PLC、视频服务器、通导设备等连接到本地的以太网交换机。整个网络方案具有如下特点:
(1)环形冗余方案,保证了系统的可靠性。过去由于没有其他可供选择的方案,冗余网络大都采用双总线方式实现。随着以太网和交换技术的发展,使得建立冗余环网成为可能。在同样冗余度的情况下,冗余环比双总线方式减小了风险的集中和降低了实现成本。如果系统的光纤发生故障,环形结构将在小于30 ms时间内切换成具有全部传输能力的总线结构。
(2)各个子系统完全独立工作,满足船检规范,即便单个系统丧失功能或网络接口故障,也不会导致全系统崩溃。而环网的故障,也不会影响单个子系统的工作。
(3)采用基于MODBUS/TCP的应用层协议的透明网络系统。MODBUS/TCP在传输层选用标准的传输控制协议TCP,它能在收到经网络传来的错误数据的情况下,通过应答与重传机制来保证可靠传输,从而保证了传输过程中的可靠性。MODBUS本身就是一个开放的协议,为众多的供应商所支持。目前MODBUS已经成为一个事实上的标准,为其他船用设备提供了通用的接口。网络层采用IP协议,用户只需了解控制设备的IP地址即可实现设备之间通信,而与低层网络地址和硬件无关;对用户来说具体的某个网络单元(硬件和软件)的存在仿佛不存在一样,整个网络可以看成一个透明网络。

图2 船舶综合平台管理系统网络结构图
5 控制系统的具体实现
传统的现场总线控制系统(FCS)是建立在各种现场总线基础上的网络集成式全分布控制系统,船舶综合平台管理系统是一个典型的基于工业以太网平台的集成式全分布控制系统。该系统借鉴了现场总线控制系统的特点,按照集中管理分散控制的原则,环网系统及各子系统采用两级控制。在此之上,设置了一层称之为全船管理网,分散于相关舱室,由计算机、显示器、打印机、UPS电源、PLC及模拟屏等组成,目的是对主要设备的控制和管理,可采用第三方管理软件系统,对全船进行深入的管理。二级为位于机舱集控室、驾驶室的现场控制站,通过集成的软件系统,实现全船的跨子系统的综合控制与监视。三级为独立的PLC控制器或专用的控制器,实时采集各种参数,如流量、压力、温度、位移等I/O参数并按照各自系统的控制原则进行独立的工作,从而整个系统形成了结构清晰的三级控制网络。
因为各级网络是同质网络,在实现时将子系统与光纤环网直接互联,而不采用某处上位机作为网关,使子系统的工作站既可以直接采集现场的PLC数据,作为主工作站使用,也可以在应急或需要时,查看相关其他系统的实时控制数据和历史数据,从而使得整个系统具有较大的抗损能力及灵活性。
与现场总线通信相比,工业以太网平台支持SNMP简单网管协议,具有实时的网络状态监视功能。在实现时通过网管软件与上位机软件的数据交换,将实时的网络状态数据和报警集成到上位机监控系统中,从而实现了系统对网络故障的实时报警和诊断功能。
上位机软件与PLC之间的通信及其与网络管理软件之间的通信均采用标准的OPC(Object Linking and Embedding for Process Control,用于过程控制的对象连接与嵌入)通信方式。OPC是现场设备级和过程管理级进行信息交互的开放的接口标准和技术规范,其目的是允许自动化和控制应用程序、控制设备以及商业和办公应用软件之间相互操作。基于这一标准可将来自不同硬件供应商的不同类型数据转化为统一的OPC数据格式,以OPC接口的方式提供给客户应用程序,从而实现系统的集成。
考虑到所选用的PLC本身带有WEB服务器,在系统实现过程中可以通过网页浏览器查看PLC中的实时数据,使系统除具有复杂的SCADA系统功能外还具有简单方便的WEB监控功能。
6 结语
本船舶综合平台管理系统采用的基于工业以太网的集成式全分布控制系统,集中应用了当今计算机、通信、SCADA、控制工业(4C)的最新技术,是现场总线控制系统的最新发展。由于它采用了开放和通用的网络技术和标准的通信接口,不仅实现了船舶的三级网络控制,同时实现了数据、语音、视频的“三网合一”,为船舶平台的综合管理提供了一个技术先进、功能完善、监控可靠的实例。
本系统虽然针对的是PSV平台供应船、AHTSV平台多用途工作船及挖泥船等海洋工程船舶,但随着自动化系统的发展,越来越多的场合要求将自动控制系统、管理系统和视频监控系统相结合,所以本控制方案也对其他船舶应用具有广泛的参考价值。
[1] 阳宪惠.现场总线技术及其应用[M].北京:清华大学出版社,1999.
[2] Ray Horak.通信系统与网络[M].徐勇,等,译.北京:电子工业出版社,2001.
猜你喜欢
承德医学院学报(2022年2期)2022-05-23 13:01:44
装备制造技术(2020年1期)2020-12-25 05:18:20
测控技术(2018年6期)2018-11-25 09:50:12
测控技术(2018年8期)2018-11-25 07:42:08
中国交通信息化(2018年8期)2018-11-09 01:05:50
中国船检(2017年3期)2017-05-18 11:33:08
电子制作(2017年24期)2017-02-02 07:14:44
电源技术(2015年7期)2015-08-22 08:48:48
中国交通信息化(2015年11期)2015-06-06 06:51:33
电子设计工程(2015年8期)2015-02-27 12:05:26