
Lokohelp康复机器人对脑卒中患者的康复作用
2012-09-30 06:39:54王彦超李月春
中国实用神经疾病杂志 2012年8期
王彦超 李月春
1)内蒙古医学院研究生院(赤峰学院附属医院)呼和浩特 010059 2)内蒙古包头市中心医院神经内科 包头 014040
目前脑卒中是常见病,已经成为第3位的死亡原因,同时也是最主要的致残率,我国每年新发脑卒中约150万,其中75%的存活者有不同程度的残疾和劳动能力的丧失,这严重影响了他们的生存质量,同时给家庭及社会带来了巨大的负担。并且脑卒中发病的年龄趋向年轻化,因此卒中患者康复问题日显突出。
在很长的一段时间内,由于片面地认为脑细胞不能再生,人们在神经疾病的治疗上采取悲观态度。随着逐渐对脑重新认识发现脑功能事实上是可塑的,即卒中后患者通过合理的学习和训练后脑功能可以得到一定的恢复,这就给医学带来了新的希望。动物实验研究发现,康复训练可诱导新生毛细血管增生,改善缺血半暗带处的血液供应,突触数目增多,轴突发芽等结构改变。同时还导致突触联系的增强、潜伏通路的开放,多种与大脑可塑性相关蛋白上调及神经干细胞激活数目增多等功能性的改变[1-2]。
传统的康复手段主要是康复师与病人之间一对一徒手式,难以实现高强度及重复性的训练要求。康复机器人的出现从某种程度上解决了这一问题,并勉励患者动机不足和情绪化对训练的影响及无法纠正的异常运动模式,同时弥补了训练方法不科学及专业康复人员疏忽而造成对病人损伤等问题。康复机器人是康复医学与机器人技术的完美结合,它是主要分为康复训练机器人和辅助型康复机器人,康复训练机器人的主要功能是帮助患者完成各种运动功能的恢复训练,辅助型康复机器人主要用来帮助肢体运动有困难的患者完成各种动作,如机器人轮椅、导盲手杖、机器人假肢、机器人护士等。下肢康复训练机器人是康复训练机器人中的一种,它可以模拟正常人的行走姿态,并且可以承担一部分人体的重量,对下肢有运动障碍的病人进行有效的下肢康复训练[3]。从第一台康复机器人Handy到2000年美国国家航空航天局(NASA)研制的一种用于脊椎神经受损病患者下肢康复的机器人设备中,目前下肢康复机器人多以被动运动模式为主。包头市中心医院神经内科康复中心引进了德国Lokohelp Group所研发的Lokohelp康复训练机器人,以下将对该机器人简单作如下综述。
1 机械原理
重复性功能运动可以改善神经损伤患者的肌肉力量和运动协调性,人类步态就是一种典型的重复性功能运动[4-5]。康复机器人Lokohelp的原理是:根据康复医学理论和人机合作的机器人原理。在一套由计算机控制的步态模拟控制系统的控制下,帮助患者模拟正常人的步行规律进行康复训练,锻炼下肢肌肉,恢复神经系统对行走功能的控制能力,达到恢复下肢运动功能的目的[6]。Lokohelp主要装置由减重装置,电动跑台及学步机(Pedago)三部分组成。跑台表面的无数个减震缝可以减少对关节、肌肉和结缔组织的有害冲击。软橡胶T型金属板能吸收对关节、肌肉、软组织90%的撞击力。学步机(Pedago)的下肢矫形器固定在矫形支架上,使双腿能进行生理学上的自主运动。它固定了步幅,地面廓清(离地距离),步速,划圈半径及左右对称性,形成模式化的感觉输入,刺激股四头肌及两端的本体感受器。可多次重复刺激,在大脑皮质下重建步行功能区,使得步行功能再获得。关键点在于,步行功能失去的患者,减重时减健侧是为了最大程度地刺激患侧。学步机的重心可以前倾,可以使髋膝关节完全打开。
2 适用范围
主要是行走能力障碍的病人包括卒中后偏瘫或脑外伤、脑肿瘤、脑炎引起的肢体活动障碍或瘫痪及脊髓损伤患者,脑瘫患者的康复。还适用于帕金森患者及多发性硬化患者步态及平衡康复。一些年老虚弱的病人,增强肌肉力量和灵活性的训练。骨关节手术后康复的患者及假肢、矫形器穿戴前后的下肢步态训练。康复训练对脑卒中患者预后有着很重要的作用。费国强等[7]对8例急性单侧脑梗死患者在早期神经康复持续治疗前后行SPECT局部脑血流量测定并将结果与对照组进行对比,发现患侧额区、上颌区以及健侧额区局部脑血流明显增加。提示该部位的脑功能有所改善。因此Lokohelp康复机器人可以使卒中患者的行走能力增强,重塑了患者运动神经和增强患者肌力与步行能力,减少痉挛。同时也增强了患者的血液循环和心肺功能,尽快尽早使患者得到康复。
3 Lokohelp的优势
目前国内外有许多康复训练的机器人,德国研发的Lokohelp和瑞士研发的Lokomat是临床康复比较先进且被认可。以下是两者的比较。见表1。
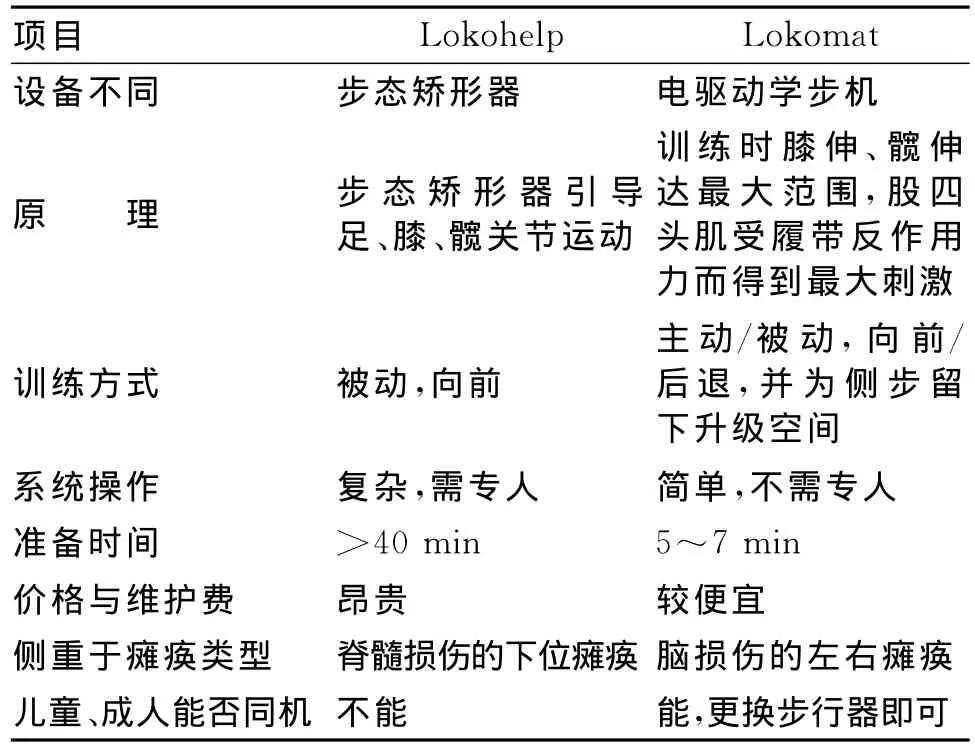
表1 Lokohelp和Lokomat康复机器人比较
4 展望
Lokohelp以其精湛的性能和低廉的价格使康复机器人在诸多医院中普及成为可能,给许多患者重新站起来、继续走起来带来了很大希望。
[1]杨敏,姜伟 .运动训练对大鼠脑可塑性影响的研究进展[J].中国康复医学杂志,2006,21(10):953-956.
[2]Hicks AU,Hewlett K,Windle V,et al.Enriched environment enhances transplanted subventricular zone stem cell migration and functional recovery after store[J].Neuroscience,2007,146(1):1-40.
[3]高峰,杜良杰 .脊髓损伤患者的下肢功能重建:智能化康复手段[J].中国康复理论与实践,2008,14(9):845-846.
[4]Barbeau H,Rossignol S.Enhancement of locomotor recovery following spinal cord injury[J].Curr Opin Neurol,1994,7(6):517-524.
[5]Barbeau H,Ladouceur M,Norman KE,et al.Walking after spinal cord injury:Evaluation,treatment,and functional recovery[J].Arch Phys Med Rehabil,1999,80(2):225-235.
[6]张立勋,颜庆,杨勇,等 .下肢康复训练机器人AVR单片机控制系统[J].机械与电子,2008,14(9):845-846.
[7]费国强,朱文炳,马昱,等 .早期神经康复治疗前后单侧大脑半球脑梗死患者脑SPECT-rCBF对比研究[J].中国临床医学,2002,9(6):649-651.
猜你喜欢
中国民间疗法(2021年16期)2021-11-04 08:13:58
装备制造技术(2020年11期)2021-01-26 00:38:58
中华养生保健(2020年2期)2020-11-16 00:49:06
家庭医学(下半月)(2020年3期)2020-05-30 12:42:04
制造业自动化(2017年2期)2017-03-20 14:26:12
中国医疗美容(2015年1期)2015-07-12 10:06:07
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
少儿科学周刊·儿童版(2015年4期)2015-06-17 03:37:19
