
单喷泵无人滑行艇航向的反步自适应滑模控制
2012-09-24 13:44廖煜雷庄佳园庞永杰杜鑫
智能系统学报 2012年3期
廖煜雷,庄佳园,庞永杰,杜鑫
(1.哈尔滨工程大学水下智能机器人技术国防科技重点实验室,黑龙江哈尔滨 150001;2.总参陆航研究所,北京 100020)
无人水面艇(unmanned surface vehicle,USV),是一种自主式的无人水面小型船舶.文中USV是装备单泵喷水推进器的刚性充气滑行艇.在不同航速下,艇体的浸湿面积和吃水等会发生很大变化,其艇体各种水动力系数也将随航速的变化而改变,故该USV具有强非线性、不确定性和时变性的特点,同时受风浪流等海洋环境干扰力的影响较大,要建立其精确的USV动力学模型非常困难,因此,控制算法必须能够适应被控制系统模型参数的变化.作为自主航行的水面智能体,航向控制问题尤为突出,设计具有自适应性的自动驾驶操舵系统显得非常重要.
当前船舶航向的非线性控制方法主要有自适应控制[1]、现代鲁棒控制[2]、滑模变结构控制[3]、Backstepping 法[4]、基于人工智能[5]和以上方法的混合控制策略等[6-7].在USV控制方面,YU等将鲁棒控制方法应用到 USV的艏向控制中[8-9],文献[10]基于Lyapunov直接法设计了三体型USV的速度控制器,Bao等针对USV的艏向和横向控制问题,基于滑模观测器和滑模控制器设计了艏向和横向联合控制器[11],文献[12]利用 Lyapunov直接法和Backstepping方法设计了USV的速度和艏向联合控制器.
本文讨论了USV在未知不确定性影响下的航向跟踪控制问题.首先分析了USV的自动稳定性,然后基于Backstepping法和滑模控制理论,提出了一种自适应滑模反馈控制律,该控制律能保证航向跟踪系统的全局渐近稳定性,其优点在于具有较短的收敛时间、良好的动态性能和自适应能力.理论分析和仿真对比试验皆表明了文中控制律的正确性和有效性.
1 系统描述和运动稳定性分析
1.1 滑行艇操纵运动数学模型
考虑到在大舵角下运动和不稳定船舶的操纵特性,Bech等在二阶线性K-T方程的基础上,进一步发展了非线性响应方程,形成二阶非线性艏摇响应方程[13]:

式中:r是艏摇角速度(顺时针为正),δ为控制舵角(左舵为正),T1、T2、T3为时间常数,K为回转性指数,α为模型非线性项系数(Norbbin系数).
在操舵不是很频繁的情况下,考虑建模误差和外界干扰力等非匹配不确定性的影响,船舶航向非线性操纵系统可以采用以下的一阶非线性艏摇响应方程(2):

式中:T为时间常数;F为建模误差Δ和未知外界干扰力ω的不确定性总和,即F=Δ(ψ,)+ω,假设不确定性的上界为|F|≤,且为慢变过程=0.
USV艏向角ψ与艏摇角速度r的关系为

1.2 航向稳定性分析
2010年5 月,该USV在山东省蓬莱海域进行了大量的直航、回转和Z型机动等操纵性试验,如图1所示.对试验数据进行系统辨识得到了艇体的水动力系数,文中的 USV操纵性参数分别为K=-2.364、T=5.489、T1=6.255、T2=0.331.
船舶在水平面内的航向稳定性包括自动稳定性和控制稳定性[13].
首先研究自动稳定性,忽略式(1)的非线性项,其特征方程式为
式(4)的2个特征根λ1、λ2可按韦达定理求得
为了判断水平面的自动稳定性,只需判断特征方程(4)的根的符号,而并不需要解方程式的根.采用古尔维茨判别法,式(4)的两根都具有负实部的充要条件是方程式的系数全部大于零,即
也即要求 T1>0,T2>0.因为 T1=6.255>0,T2=0.331>0,由古尔维茨判别法可知,该USV具有水平面内的直线自动稳定性,习惯上也常称为航向稳定性.
与常规水面船舶相比,如“育龙”号实习船[7]中,K=-0.48、T=216.8,文中 USV 的 T 值较小,因此具有较好的稳定性;而K较大,因此回转性能也更好.可见该艇具有良好的机动性能,这是由艇型和操舵方式决定的,即USV动力装置为喷水推进器,它通过改变喷嘴转角来进行艏向控制(对喷嘴转角的操纵,按习惯称为舵角操纵).
显然,USV航向跟踪控制系统(2)、(3)是单输入单输出的不确定性非线性系统,控制问题可描述为设计反馈控制律,保证USV的艏向跟踪误差有界且收敛到零.

图1 试验中的USV Fig.1 Unmanned surface vessel operating in the sea
2 反步自适应滑模控制器
2.1 反步自适应滑模控制器设计
首先,定义如下状态变换:
式中:ψd为期望艏向角,满足二阶可导的光滑函数;χ为稳定项辅助方程;c1为正常数.
定义Lyapunov预选函数为

对V1求导,则

定义Lyapunov预选函数为
式中:σ为滑模切换函数.定义切换函数为

式中:k1为正常数.对V2求导,则

式中:f=-r/T-αr3/T,b=K/T.
取反馈控制律为


式中:h、β皆为正常数.将式(6)代入式(5)可得
取矩阵

由于

式中:Z=[z1z2]T.则当|Q|=h(c1+k1)-1/4 >0时,式(7)有

那么只要选取适当的 h、c1、k1使得|Q|>0,从而保证Q为正定矩阵,则必有2≤0成立.也就保证了USV航向跟踪系统是Lyapunov意义下全局渐近稳定的.
在实际控制中,USV航态复杂多变,因此具有强非线性,这导致航向非线性系统的模型参数很难精确获得且具有较大不确定性;同时,USV航行于复杂海洋环境中,经常受到未知外加干扰力的影响.因此,总不确定性F的上界很难确定.为了避免F上界带来的抖振等问题,采用自适应算法对F进行估计[14].

式中:γ为正常数.对式(9)求导可得
设计自适应反馈控制律为

定义不确定性F的自适应律为
将式(11)和(12)代入式(10),且由式(8)可得

2.2 Backstepping控制器设计
为了与文中自适应反步(Backstepping)滑模控制器的控制效果进行对比,下面利用Backstepping法设计USV航向跟踪控制器,其中假设不确定性F=0.
引入如下2个误差变量:

式中:η=-n1x1为虚拟控制输入,n1为正常数.
定义Lyapunov预选函数为


对式(16)求导可得


式中:n2为正常数,将控制律(14)代入式(13)可得

由设计过程可知,系统满足Lyapunov稳定性理论条件,因此误差变量x1、x2是渐近稳定的,这保证了USV航向跟踪系统是全局渐近稳定的.
2.3 稳定性分析
由上面的设计过程可知,Backstepping法是一种由前向后递推的设计方法,通过逐步迭代设计Lyapunov函数使系统的误差渐近稳定,最终实现对原系统的全局渐近镇定.
定理1 考虑存在不确定性影响的航向非线性系统(2)、(3),在自适应反馈控制律(11)和不确定性自适应控制律(12)的作用下,误差变量z1、z2、σ是全局渐近稳定的,保证了USV航向跟踪系统的全局渐近稳定性,实现了航向的自适应控制.
证明 由2.1节的设计过程得证.

证明 由2.2节的设计过程得证.
3 仿真结果与分析
根据海试操纵性试验结果,文中USV操舵系统的参数为 K=-2.364、T=5.489、α =0.000 094.为了方便阐述,反步自适应滑模控制器称为控制律1,Backstepping控制器称为控制律2.控制律1的设计参数为c1=0.9、k1=0.15、h=0.26、β =0.002、γ =0.000 1.控制律 2的设计参数为 n1=0.03、n2=7.
在下面的仿真对比试验中,初始值均取为:ψ0=30°,r0=0,同时文中考虑舵角饱和限制条件为-30°≤δ≤30°,不确定性设为建模误差 Δ=sin 2πt(°·s-2)和干扰力 ω = ±1(°·s-2)的正态白噪声.设置期望航向为谐波航向ψd=sin(t/40)和直航ψd=0 2种情形,使用Matlab Simulink软件进行数值仿真,仿真试验结果如图2~9所示.
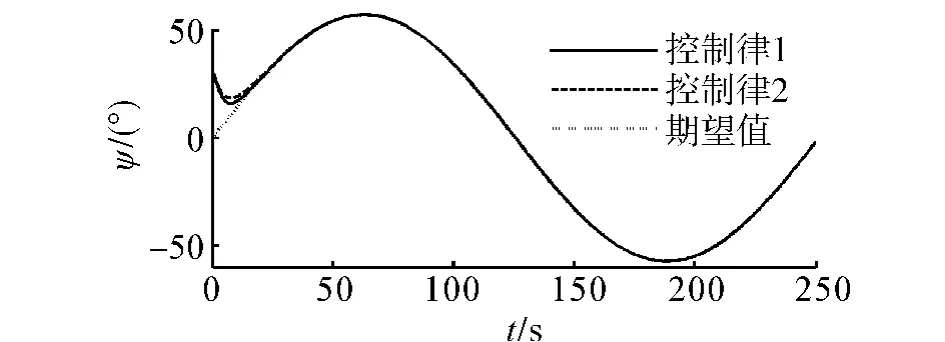
图2 艏向角ψ响应曲线(直航)Fig.2 The response graph of yaw ψ(straight)
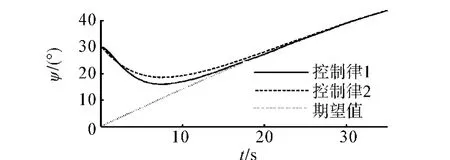
图3 艏向角ψ响应曲线(起始到35 s)Fig.3 The response graph of yaw ψ (start to 35 s)
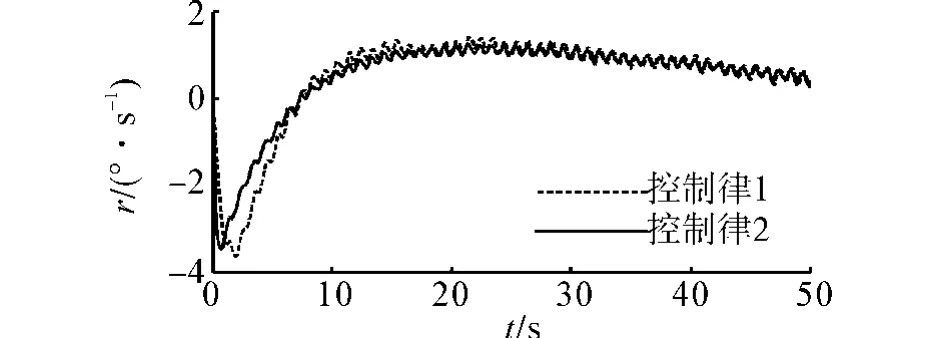
图4 角速度r响应曲线(直航)Fig.4 The response graph of angular velocity r(straight)
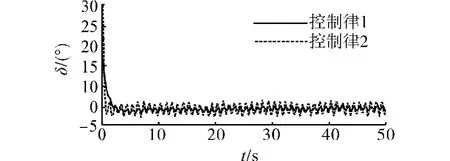
图5 控制舵角δ响应曲线(直航)Fig.5 The response graph of control rudder δ (straight)
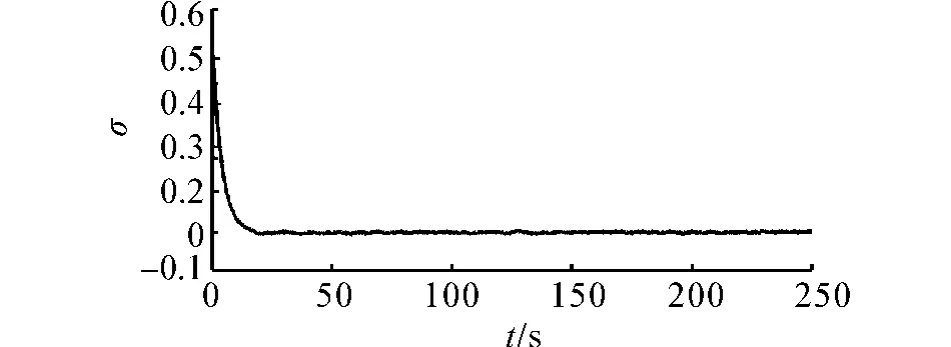
图6 滑模面σ响应曲线Fig.6 The response graph of sliding mode surface σ
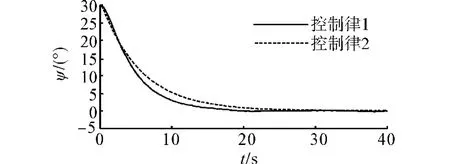
图7 艏向角ψ响应曲线(谐波)Fig.7 The response graph of yaw ψ(harmonic)
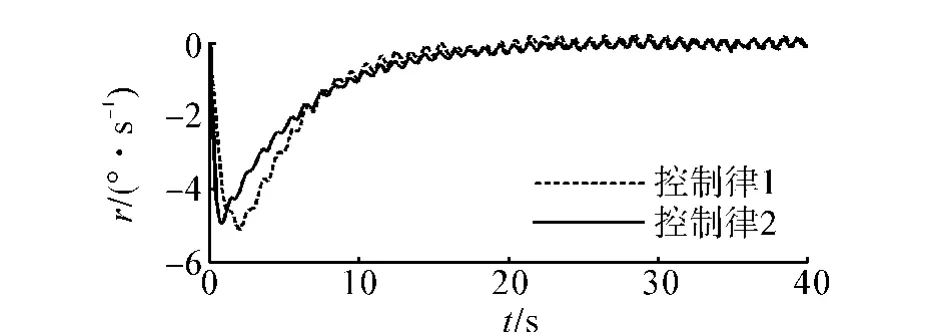
图8 角速度r响应曲线(谐波)Fig.8The response graph of angular velocity r(harmonic)
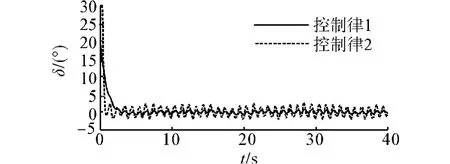
图9 控制舵角δ响应曲线(谐波)Fig.9 The response graph of control rudder δ (harmonic)
谐波航向跟踪的试验结果如图2~6所示.由图3、5可知,对比控制律2,控制律1有更短的收敛时间和更小的控制舵角(意味着更小的能量消耗);同时,在不确定性的影响下,舵角振荡较小、输出平缓,这意味着控制律1有较好的动态性能和自适应能力.直航控制的试验结果如图7~9所示,与控制律2相比,控制律1有较好的控制性能和自适应能力.从图2、7可看出,2种控制律皆能完成航向跟踪,这验证了定理1和定理2.图6也说明了跟踪系统的滑模切换面σ是渐近稳定的.
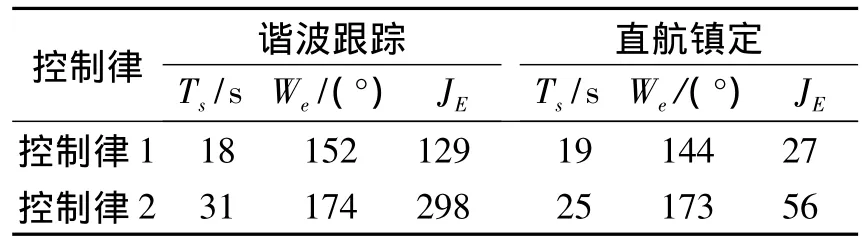
表1 控制效果对比Table 1 Comparison of control results
4 结束语
文中讨论了在模型不确定性和外界干扰下,USV航向非线性系统的控制问题.对试验数据的分析表明,该USV在水平面内运动是静不稳定的,但具有运动稳定性,基于滑模控制理论和Backstepping法,提出了一种反步自适应滑模控制器.通过理论证明,在该控制律作用下USV的航向跟踪控制系统是全局渐近稳定的.数值仿真对比试验表明所提控制律具有良好的自适应性和跟踪性能,该方法也可推广到其他海洋运载系统.探讨更复杂环境下的航向控制问题,将是未来的研究重点.
[1]SKJETNEA R,FOSSEN T I,KOKOTOVIC P V.Adaptive maneuvering,with experiments,for a model ship in a marine control laboratory[J].Automatica,2005,41(2):289-298.
[2]HU S S,YANG P H,JUANG J Y,et al.Robust nonlinear ship course keeping control by H∞I/O linearization and μsynthesis[J].International Journal of Robust and Nonlinear Control,2002,13(1):55-70.
[3]刘雨,郭晨,吕进.基于backstepping的船舶航向滑模控制[J].中南大学学报:自然科学版,2007,38(增刊1):278-279.
LIU Yu,GUO Chen,LÜ Jin.Sliding-mode control of ship course tracking based on backstepping[J].Journal of Central South University:Science and Technology,2007,38(suppl.1):278-279.
[4]朱齐丹,周芳,赵国良,等.基于反步法和滑模观测器的船舶航向控制[J].华中科技大学学报:自然科学版,2009,37(4):122-125.
ZHU Qidan,ZHOU Fang,ZHAO Guoliang,et al.Control of ship courses using backstepping and sliding mode observer[J].Journal of Huazhong University of Science and Technology:Natural Science Edition,2009,37(4):122-125.
[5]汪洋,郭晨,孙富春,等.基于动态神经模糊算法的船舶航向自适应控制[J].哈尔滨工程大学学报,2009,30(10):1159-1164.
WANG Yang,GUO Chen,SUN Fuchun,et al.Adaptive control of ship course using a dynamic neural fuzzy algorithm[J].Journal of Harbin Engineering University,2009,30(10):1159-1164.
[6]罗伟林,邹早建,李铁山.船舶航向非线性系统鲁棒跟踪控制[J].控制理论与应用,2009,26(8):893-895.
LUO Weilin,ZOU Zaojian,LI Tieshan.Robust tracking control of nonlinear ship steering[J].Control Theory & Applications,2009,26(8):893-895.
[7]袁雷,吴汉松.船舶航向非线性系统的多滑模自适应模糊控制[J].智能系统学报,2010,5(4):308-312.
YUAN Lei,WU Hansong.Multiple sliding mode adaptive fuzzy controller for nonlinear marine autopilot systems[J].CAAI Transactions on Intelligent Systems,2010,5(4):308-312.
[8]YU Z,BAO X,NONAMI K.Course keeping control of an autonomous boat using low cost sensors[J].Journal of System Design and Dynamics,2008,2(1):389-400.
[9]YU Z,BAO X,NONAMI K.Mixed H2/H∞based course following control for a small low cost autonomous boat[J].ICGST International Journal on Automatic Control and Systems Engineering,2007,7(1):51-59.
[10]KUMARAWADU S,KUMARA K J C.On the speed control for automated surface vehicle operation[C]//The Third International Conference on Information and Automation for Sustainability.Melbourne,Australia,2007:135-140.
[11]BAO X,NONAMI K,YU Z.Combined yaw and roll control of an autonomous boat[C]//2009 IEEE International Conference on Robotics and Automation.Kobe,Japan,2009:188-193.
[12]LIAO Yulei,PANG Yongjie,WAN Lei.Combined speed and yaw control of underactuated unmanned surface vehicles[C]//The 2nd International Asia Conference on Informatics in Control,Automation and Robotics.Wuhan,China,2010:157-161.
[13]范尚雍.船舶操纵性[M].北京:国防工业出版社,2002:30-39.
[14]刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2002:240-247.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
新世纪智能(高一语文)(2021年3期)2021-07-16
舰船电子工程(2020年4期)2020-06-19
民用飞机设计与研究(2019年4期)2019-05-21
中国惯性技术学报(2019年6期)2019-03-04
北京航空航天大学学报(2017年4期)2017-11-23
电子制作(2017年24期)2017-02-02
北京航空航天大学学报(2016年7期)2016-11-16
