
一种无线传感器信号衰减自适应测距模型
2012-09-24 13:44孙凤池宋萌刘光
智能系统学报 2012年3期
孙凤池,宋萌,刘光
(南开大学 软件学院,天津300071)
移动机器人具有可移动性,能够代替人到各种复杂或危险的环境中执行侦查、勘探、救援、搜索等任务,从而在星球探测、海洋开发、军事反恐、灾难救助、危险品处理等领域逐渐显示出重要作用.为了完成各种作业任务,机器人必须能够在所处环境中自主导航,而可靠的定位是移动机器人导航的基础[1].机器人依靠各种传感器从环境中提取路标特征实现定位和导航,超声、激光、红外等测距传感器以及视觉传感器被普遍应用于移动机器人定位和导航[2-5].
近年来,射频识别(radio frequency identification,RFID)技术被引入到机器人定位研究中,如文献[6]使用装备了RFID天线阅读器的移动机器人,建立了描述RFID信号强度特性的概率模型,从而可以确定环境中某些物体上的标签的位置,然后通过融合RFID信息和激光信息实现全局定位.文献[7]综合射频通信和超声波测距技术实现了一个用于室内环境的移动机器人定位系统,通过事先在地面或者天花板上安放多个测距节点,实现对机器人的跟踪.文献[8]针对在某些未知环境中难以可靠提取自然路标的情况,基于RFID通信和超声测距提出了一种可以根据定位需要进行动态配置的路标系统.
室内环境中机器人的精确定位是以精确的测距为基础的,对于RFID定位传感器,可以采用基于信号接收强度(received signal strength,RSS)的测距,也就是通过测量信号在传播过程中的衰减实现距离的测定.与基于信号到达时间和信号到达角度的测距相比,该方法不需要额外的硬件设备来进行精确的时间同步和角度测量,成本较低,且可以兼用于室外和室内.这方面已有的方法主要是依据射频信号能量衰减的物理原理,在大量人工测量数据的基础上,采用最小二乘法之类的方法拟合物理衰减模型的参数.但这种建模方法没有考虑RFID传感器的个体差异,而且所建立的模型不能适应环境变化,因此一旦定位装置进入新环境,就必须重新测量采集数据并拟合模型以适应环境变化对射频传播造成的影响.为了克服上述缺点,本文提出了基于在线自学习方式,获得对应无线传感器射频信号能量衰减的自适应测距模型,这种模型可以自动适应外部环境的变化,兼顾无线传感器个体之间的差异,并可以在线自我调整,以适用于规模较大、组成介质多变的环境.
1 问题描述
1.1 RFID定位路标传感器
图1是采用的RFID无线传感器的电路结构与原理框图,在设计上集成了射频通信和超声测距的功能,原理类似于文献[9]中的系统;但是在串口通信、超声发射与接收等方面因应用模式的差异而有较大的区别,并且射频的发射和接收是可以控制切换的[8].
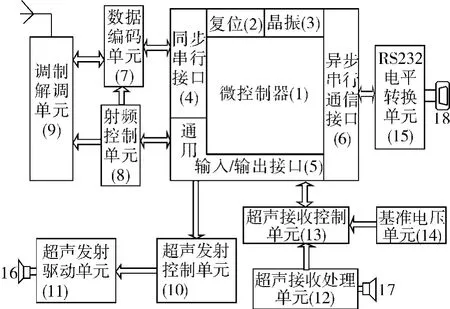
图1 无线传感器路标电路结构与原理Fig.1 The circuit schematic diagram of wireless sensors
RFID定位路标被安放好以后,以射频信号的形式周期性地发射自己的身份信息,同时发送超声波脉冲.机器人车载路标观测节点能够接听路标发出的组合信息,并利用射频信号和超声波信号的到达时间差测量出自己和路标之间的距离,然后根据这些测距数据及多个节点之间的相对位置实现机器人定位[8],但这种基于超声波到达时间差的测距方法的适用范围和角度受限于超声波器件的物理特性.因此在本文中,超声测距仅用来为在线学习射频衰减测距模型自适应参数修正,在机器人进行正常定位时,依据的是射频衰减测距模型输出的测距结果.在设计过程中,路标微控制器内部的Flash存储器内存放了表示路标身份的编号信息.
1.2 射频传播能量衰减模型
无线电波传播有许多不同的机理,传播方式主要有视距传播和非视距传播.视距传播就是自由空间传播,而非视距传播主要包括反射传播、绕射传播和散射传播等方式.在环境中还存在障碍物及电磁波传播多径效应的影响,在大多数情况下,电磁波的能量衰减和距离的n次方幂成反比,假设发射功率为Pt,对于传播距离为d处的功率为Pr,则有如式(1)所示的经验模型关系式:

式中:P0表示在参考距离处接收到的功率,与Pt的关系恒定;n为无线信号传播的衰减因子,取值通常为[0,6],其中在自由空间中n的取值为2,在室内环境中距离和功率的关系取决于建筑物的材料、密度和高度,在走廊或室内开阔空间的n值小于2,而在金属建筑物中n值可以达到6[10].
对式(1)2边同时做10log分贝运算,可得

式(2)只有2个参数P0和n,在测定一些数据之后,P0和n的取值可以通过最大似然估计等方法拟合曲线来确定.这种基于测量数据拟合无线信号衰减模型参数的方法,具有简单、方便的优点;但是在实际应用中与激光、超声及红外相比,它的测距误差大,易受环境、自身工作条件干扰.基于以上模型存在的问题,本文通过在线学习获得自适应射频衰减测距模型,在线学习的结果是一个从接收到的能量值和无线传感器的身份编号映射到接收距离的神经网络模型,这种模型具有以下优点.
1)具有在线学习能力,即可根据实际应用的需要在线完成模型的学习,而以往的模型无论是经验模型、多项式拟合模型还是概率模型,基本上都是离线模型[11],即模型的参数确定都是离线完成的,然后才将此模型付诸于应用.
2)具有自适应的能力,在实际应用过程中,此模型可以根据无线信号传播环境的变化,进行参数调整,本文称这种能力为自适应能力;以往的模型一旦模型学习结束,在整个定位应用过程中,模型的参数都不会发生变化.
3)能够消除无线传感器个体差异引起的误差,已有的方法在建模过程中,很少考虑无线传感器之间的差异,本文在建立模型的过程中,将无线传感器的差异作为模型的一个输入参数进行学习,这样可以从根本上消除无线传感器个体差异对建模的影响.
信号衰减自适应测距模型在线学习流程如图2所示,其中能量和距离数据的读入阶段主要负责无线传感信号功率数据和超声测距数据的读入;能量和距离数据的处理阶段,主要负责将读入的功率数据和距离数据根据实际物理原理进行相应的筛选操作;模型在线学习阶段通过前馈神经网路进行模型学习;判断模型是否要自适应调整时,在实际应用过程中模型参数可以随着无线信号传播环境的变化而更新.
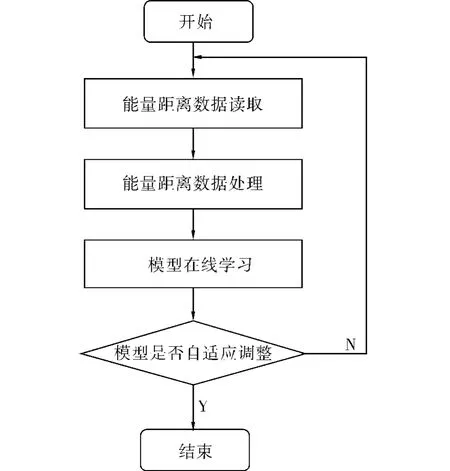
图2 自适应测距模型学习流程Fig.2 The learning process of the adaptive range model
2 射频衰减自适应测距模型的学习
2.1 能量和距离数据读取
无线电信号在传播的过程中,有2种调制方式,一种是频率调制(FM),另一种是幅值调制(AM).在频率调制的整个过程中,待调制信号的能量与传播的二进制数据无关,其特点是抗干扰能力比较强;而在幅值调制的整个过程中,带调制信号的能量与传播的二进制数据有关,其特点是可以传播很远的距离.本文的无线电数据采用AM调制,为了实现对能量数据的精确读取,首先对传输数据进行归一化处理(即增加冗余数据保证每次传输数据0和1的比例相同),然后进行序列均值平滑处理.图3为采用上述方法读取的能量直方图,这2个图都是在某一距离下读取一定数量的能量数据,通过统计得到的能量直方图.
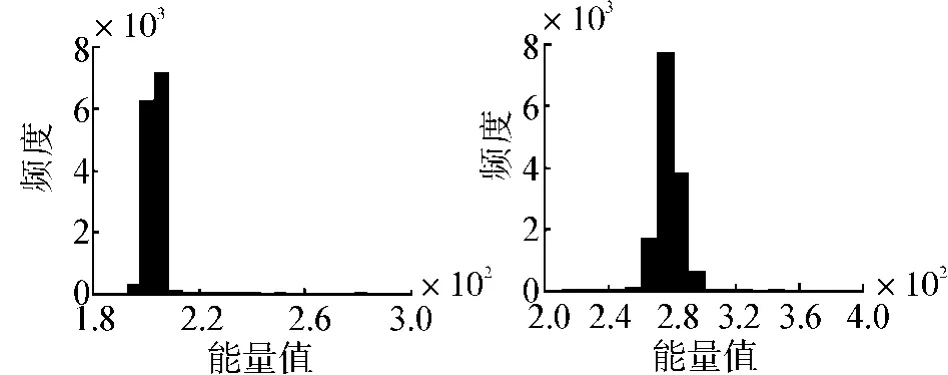
图3 接收能量数据直方图Fig.3 The histogram of energy receiving
2.2 能量和距离数据处理
从图3可以看出,当距离一定时接收信号的能量基本上满足正态分布.因此可以引入如下数据处理方法,当能量测取无线传感器在某一固定位置时,读取某一未知发射无线传感器的所有RSS数据,并将其存储到数组A中,根据高斯分布特点,在A中肯定有些统计数据的概率特别低,为使模型学习更精确,通过高斯模型将这些小概率点消除.由于读取的能量服从高斯分布,可以建立高斯分布函数如式(3):
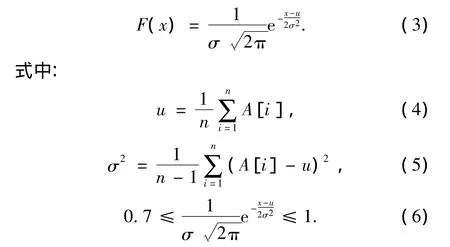
根据实际经验,选0.7为数据筛选的关键点,当高斯分布函数值F(x)≥0.7时,判定对应的RSS值为大概率事件;当F(x)<0.7时,判定对应的RSS值为小概率事件.具体处理过程如下:
1)通过式(4)、(5),计算出均值u和方差σ2;
2)通过式(6),计算出RSS值大概率事件的取值范围;
3)根据第2)步计算出的大概率事件的取值范围,可以从A中选择大概率事件的RSS值,并保存到AG中,从而将小概率事件从A中去掉.
2.3 模型在线学习
能量和距离的关系模型可看作是一个简单的非线性函数,已有研究表明,只要网络的结构充分大,通过选择网络的参数,3层神经网络能以任意精度逼近任何连续的函数,因此能量和距离的关系模型可以用3层前馈神经网络来逼近.本文称要建立的3层神经网络为能量距离神经网络,此神经网络结构为3层的前馈神经网络,包括输入层、隐含层和输出层.
2.3.1 能量距离神经网络的建立
在能量距离神经网络中,输入层用于输入测量到的数据,包括能量值P和传感器编号I,输出层输出距离映射值D,与输入数据相对应,中间的隐含层接收所有输入单元传来的信号,并把处理后的结果传给每个输出单元.神经网络的输入层和输出层的神经元个数由数据的表达方式和需要逼近的问题共同确定.本文所建立的神经网络,输入层神经元个数为2个,输出层神经元个数为1个,综合考虑拟合精度和学习收敛速度的需要,设计隐含层神经元个数为8.

输入层到隐含层的权重为wij,即表示输入层第j个单元到隐含层第i个单元的权重,隐含层到输出层的权重为wi,即表示隐含层第i个单元到输出层的权重.如果{wij,wi}给定,网络中单元的取值与输入向量X的关系可以描述如下.
对于输出层单元,其输入信号为

网络的最终输出如式(7):

2.3 .2 能量距离神经网络的学习
神经网络的学习过程可以归结为一个最优化问题,就是确定适当的权重{wij,wi},使得网络映射输出和真实值误差最小,即使式(8)的值达到极小,其中N为样本数.
然后,通过LM-BP学习算法实现权重学习,LMBP学习算法的优点是计算量较小,可以保证有较快的收敛速度.
2.3 .3 模型的自适应调整
模型的自适应调整就是根据实际应用的问题或者传播环境的变化,适当调整自身参数以减小测距误差.模型的自适应调整发生在以下几种情况:1)测距模型的测距误差太大,无法应用于实际,可以通过判断学习距离的方差来实现,若学习距离的方差大于某一阈值,则判定模型参数不准确,需要进行参数调整;2)在测距应用过程中,如果发现多个无线传感器的编号未出现在学习数据中,则认为需要进行参数调整;3)当无线传感器的应用环境发生了很大的变化时,则应调整模型参数以适应外部环境.
3 实验结果及分析
为了验证所提出的自适应测距模型,使用前述无线传感器节点进行实验,这种无线传感器含有CC1000通信模块,CC1000内含RSS检测单元,检测信号的强度可以通过电压的形式来指示.在室内随机安装4个无线传感器发射节点和1个无线传感器接收节点,在此分别给出传统经验模型和本文所提模型的实验结果.
3.1 基于传统经验模型的能量测距
传统经验模型的实验结果如图4、5所示.
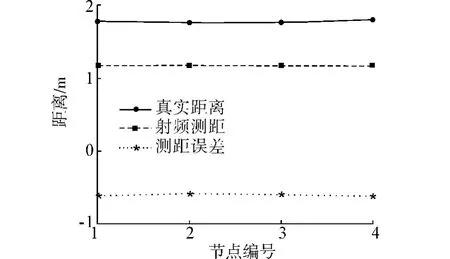
图4 1.2 m位置处传统模型的测距结果Fig.4 The distance measurement results of the traditional ranging model at 1.2 m
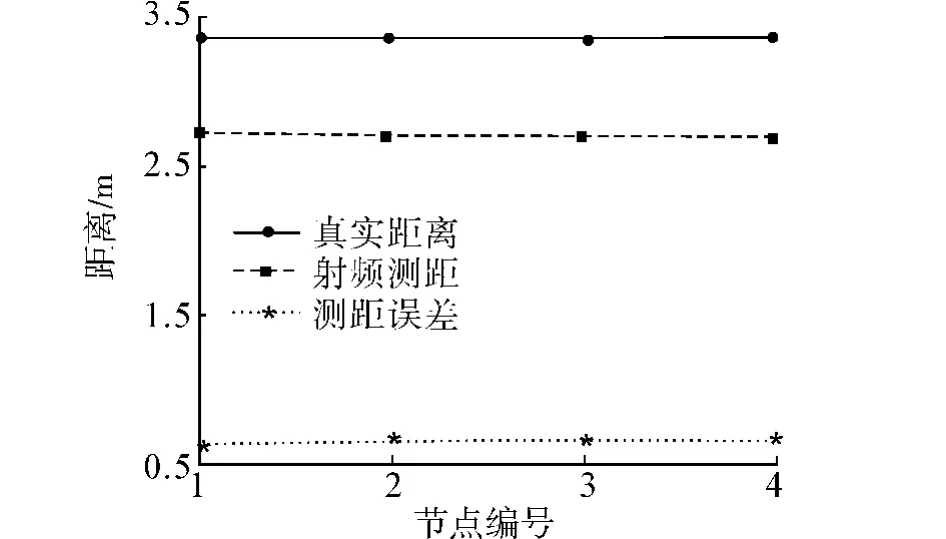
图5 2.7 m位置处传统模型的测距结果Fig.5 The distance measurement results of the traditional ranging model at 2.7 m
图4是距离大约1.2 m处的实验结果,误差均值为0.60 m,相对误差是0.5 m;图5是距离2.7 m左右的实验结果,误差均值为0.65 m,相对误差是0.3 m.从图中可以看出,采用传统经验模型在不同距离处进行测距时平均误差差别很大.传统模型对环境的适应性不是很强,随着测量距离的不同,测量误差变化很大.
3.2 基于自适应无线信号衰减模型的测距
图6是本文提出的自适应测距模型的实验结果,平均测距误差为0.2 m.图7是加入数据滤波的实验结果,平均误差为0.05 m.可以看出,采用加入数据滤波的自适应测距模型在更大的测量范围内取得了更优的测距效果.
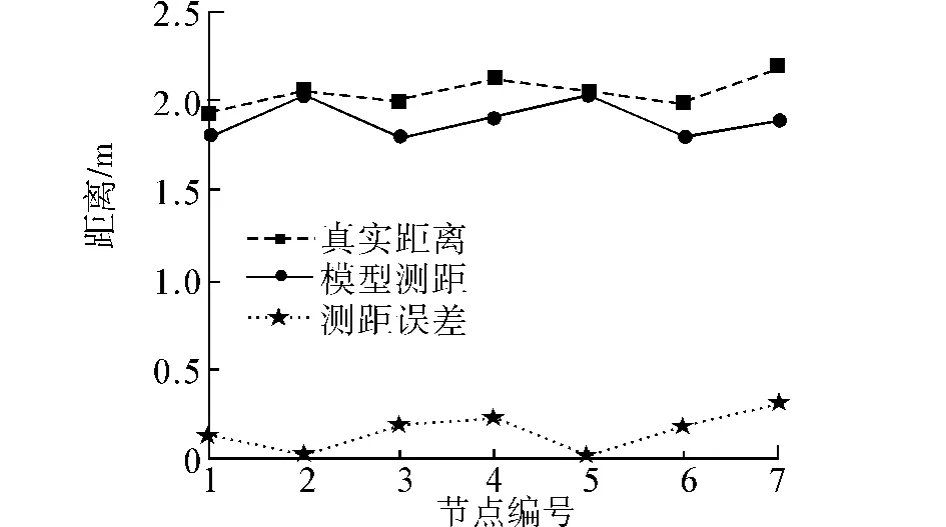
图6 自适应测距模型的测距结果Fig.6 The distance measurement results of the adaptive range model without data filtering
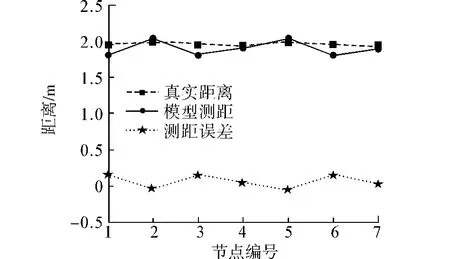
图7 加入数据滤波的自适应测距模型的测距结果Fig.7 The distance measurement results of the adaptive range model with data filtering
4 结束语
利用无线传感器作为移动机器人定位与导航的路标,能够解决某些环境中难以提取自然路标的问题,并便于实现特征关联.通过测量接收信号强度进行测距,是实现无线传感器定位的关键.本文基于神经网络的方法为无线传感器建立动态的自适应射频衰减测距模型.由于学习过程是在线进行的,环境因素如反射、折射、多径效应的影响被包含在模型中,提高了模型对环境的适应能力,并且把路标的身份作为神经网络模型的输入,从而区分了传感器中个体的差异,实验结果证明了这种建模方法在提高无线传感器测距精度方面的有效性,显示出对测距距离的良好适应性.如何把这种测距方法用于无线传感器动态配置、移动机器人同时定位与建图,这是下一步的研究工作重点.
[1]陈卫东,张飞.移动机器人的同步自定位与地图创建研究进展[J].控制理论与应用,2005,22(3):455-460.
CHEN Weidong,ZHANG Fei.Review on the achievements in simultaneous localization and map building for mobile robot[J].Control Theory and Applications,2005,22(3):455-460.
[2]魏芳,董再励,孙茂相,等.用于移动机器人的视觉全局定位系统研究[J].机器人,2001,23(5):400-403,420.
WEI Fang,DONG Zaili,SUN Maoxiang,et al.A vision global location system technique for mobile robots[J].Robot,2001,23(5):400-403,420.
[3]蔡自兴,王勇,王璐.基于角点聚类的移动机器人自然路标检测与识别[J].智能系统学报,2006,1(1):52-56.
CAI Zixing,WANG Yong,WANG Lu.Corner cluster based detection and recognition of natural landmark for mobile robots[J].CAAI Transactions on Intelligent Systems,2006,1(1):52-56.
[4]LOPEZ D G,SJO K,PAUL C,et al.Hybrid laser and vision based object search and localization[C]//IEEE International Conference on Robotics and Automation.Pasadena,USA,2008:2636-2643.
[5]陆军,孙凌丽,穆海军,等.基于全景视觉的机器人相互定位的研究[J].哈尔滨工程大学学报,2010,31(4):457-464.
LU Jun,SUN Lingli,MU Haijun,et al.Mutual localization of mobile robots using an omnivision system[J].Journal of Harbin Engineering University,2010,31(4):457-464.
[6]HAHNEL D,BURGARD W,FOX D,et al.Mapping and localization with RFID technology[C]//IEEE International Conference on Robotics and Automation. New Orleans,USA,2004:1015-1020.
[7]CHO K,KANG M S,PARK S,et al.Development of indoor localization system using ultrasonic sensors[C]//International Symposium on Robotics(ISR).Seoul,Korea,2008:211-215.
[8]孙凤池,苑晶.一种用于未知环境探索的可动态配置路标系统[J].机器人,2010,32(1):77-82.
SUN Fengchi,YUAN Jing.A dynamically configurable landmark system for unknown environment exploration[J].Robot,2010,32(1):77-82.
[9]PRIYANTHA N B,CHAKRABORTY A,BALAKRISHNAN H.The cricket location-support system[C]//Sixth Annual International Conference on Mobile Computing and Networking.New York,USA,2000:32-43.
[10]石鹏,徐凤燕,王宗欣.基于传播损耗模型的最大似然估计室内定位算法[J].信号处理,2005,21(5):502-504.
SHI Peng,XU Fengyan,WANG Zongxin.A maximumlikelihood indoor location algorithm based on indoor propagation loss model[J].Signal Processing,2005,21(5):502-504.
[11]VORST P,ZELL A.Semi-autonomous learning of an RFID sensor model for mobile robot self-location[C]//European Robotics Symposium.Prague,Czech Republic,2008:273-282.
猜你喜欢
汽车工程师(2021年12期)2022-01-17
读写月报(初中版)(2021年12期)2021-05-25
军民两用技术与产品(2021年12期)2021-03-09
装备制造技术(2020年11期)2021-01-26
科学(2020年3期)2020-01-06
中学生数理化·七年级数学人教版(2019年4期)2019-05-20
电子制作(2017年7期)2017-06-05
中国卫生(2016年11期)2016-11-12
电子制作(2016年1期)2016-11-07
腹腔镜外科杂志(2016年9期)2016-06-01
