
轮/履耦合式无障碍轮椅系统设计及运动分析
2012-09-07 02:10王冬晓高学山刘云辉
郑州大学学报(工学版) 2012年4期
王冬晓,高学山,2,刘云辉
(1.北京理工大学智能机器人研究所,北京100081;2,哈尔滨工业大学机器人技术与系统国家重点实验室,黑龙江哈尔滨150001;3.香港中文大学机械与自动化系,香港)
0 引言
轮椅是老年人和下肢功能障碍患者日常生活中不可或缺的代步工具.上世纪90年代起,欧美等发达国家开始进行了有关无障碍轮椅的研究[1-4].目前无障碍轮椅按越障的方式可分为星型轮式、履带式以及步行式等几类[5].其中,星型轮式无障碍轮椅能够适应各种楼梯及障碍地形,主要代表有iBOT等[6-8].因轮式在越障时的安全局限性,这类轮椅通常需要复杂的平衡控制机构及安全保护机构才能平稳越障.
履带式无障碍轮椅能够平稳地进行楼梯攀爬,适合大多数的室内外障碍地形,相对于其它种类的无障碍轮椅更为安全稳定.比如,英国Baronmead公司开发的一种通过履带式传动机构进行越障的电动轮椅车等[9-10].但因履带运动的局限性,导致该类无障碍轮椅运动速度缓慢,重量大,易对楼梯边缘造成损伤,平地行走、转弯不方便等问题.
步行式无障碍康复轮椅主要有日本早稻田大学开发的双足行走机器人“wL -16RIII”等[11-14].此类无障碍轮椅适合地形广泛,能够进行楼梯攀爬,同时机构简便.需专人辅助越障,平地行走动作缓慢,安全性低,易给使用者造成心理恐惧.
鉴于此,笔者提出了一种基于轮/履耦合式移动平台的智能无障碍轮椅,该轮椅的特色之处在于,当轮椅在平地或坡地等无障碍环境下移动时,轮椅的移动机构是轮式移动;当轮椅遇到楼梯时,其移动机构展开为履带式移动机构.这样可以将轮式移动的快速性优点和履带式移动的高越障性优点有机地组合,从而使轮椅的适用环境范围得到大大地扩展.同时,该无障碍轮椅座椅位置和倾斜度可调,从而实现智能重心控制并保证上下楼梯时的安全和乘坐者的舒适感.
1 无障碍轮椅机构设计
1.1 机构总体方案
本系统的机械部分由并联式轮/履转换机构、弹性分段式履带机构、重心控制机构以及轮椅主框架等4部分组成,总体结构如图1所示.
其中,轮/履转换机构和重心控制机构通过轮椅主框架连接在一起;转换机构被夹在两片轮环中,弹性分段式履带与轮环藕合在一起并覆盖于转换机构之外.

图1 总体结构图Fig.1 The overall structure
整个无障碍轮椅采用对称结构,每个履带轮结构包含一个转换机构、两片轮环、一个驱动轮机构以及一条弹性分段式履带.履带轮采用双承重轮驱动的模式,使用一个大转矩直流电机经特制减速器传动至驱动轴;两片轮环经过轮毂被驱动轴同时驱动;轮环通过环齿卡槽带动弹性分段式履带运转.当轮椅从轮式结构转变为履带式结构的时候,轮环内部的轮/履转换机构受两个电动推杆驱动,将两个小张开轮推出;小张开轮将弹性分段式履带顶开,使弹性履带处于张开状态,最后作用于轮椅主框架,带动轮椅行走.在轮椅行走的同时,重心控制机构中的两个电动推杆控制轮椅主框架,使之维持平衡状态.
1.2 并联式轮/履转换机构设计
轮/履转换机构由并联式多杆机构、小张开轮以及电动推杆有机地结合而成,可以完成灵活快速的轮/履转换功能,简化的机构原理图如图2所示.
本机构通过两个单自由度的摆杆机构组合为一个并联的双自由度双摆杆机构.因为小张开轮以及电动推杆等所有构件在紧缩状态时需要收缩回大轮环内,如图1(b)所示,而张开状态时小张开轮则需要保持水平.同时,电动推杆可以看做一导杆机构.大轮环及小张开轮的直径确定、小张开轮张开长度确定、以及机构两极限位置与一个中间位置确定,作者采用几何作图法确定了各杆件的位置及长度.其中,小张开轮是无齿双面轮结构,每个小张开轮都由两片轮面组成,中间有一定的空隙,用以卡住弹性履带内部的凸齿,从而确保小张开轮及连接杆不会产生横向的偏移.根据履带式行走和轮式行走的特点智能迅速的转换状态,从而达到平地行走迅速,复杂路况安全越障的目的.
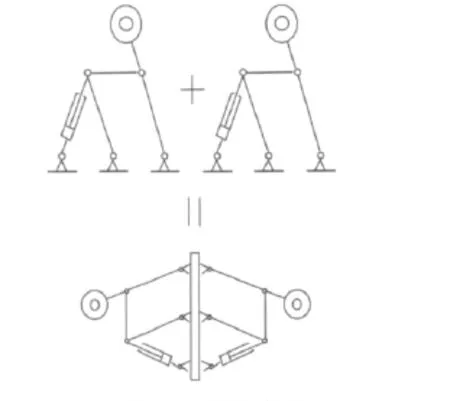
图2 并联式轮/履转换机构原理图Fig.2 Parallel wheel-tracked mechanism
1.3 弹性分段式履带设计
如图3所示,左图是轮/履耦合移动机构工作在轮式运动方式时,履带紧箍在外桶轮上的几何示意图,这时履带和外桶轮的边缘重合,其半径可简记为R.右图则是机构变换后轮/履耦合移动机构的移动部分呈现为履带移动方式的几何示意图,其中假设履带小轮半径为r,点O和A点的距离记为L,设计时应初步给定L的值.
当轮/履耦合移动机构工作在轮式运动模式时,机构收合,履带紧附在外桶轮上,其周长可表示为S1=2πR;当轮/履耦合移动机构工作在履带式运动模式时,变换机构张开,随之履带也展开,其周长可简单表示为S2=4L+4ra+2Rβ,由于L明显地大于R,在设计时,一般取L=(1.5~2)R.通过计算表明S2>S1,即履带在这两种移动方式下的周长发生了变化.因此轮/履耦合移动机构的履带应该使用特殊的弹性履带.

图3 轮/履耦合结构收放的几何示意图Fig.3 Geometry of the wheel-tracked mechanism
弹性分段式履带采用刚性和柔性材料分段结合的方法,使该履带在拥有传统履带优势的同时拥有高弹性的特点,从而能够有效地适应本轮/履转换机构.主要由仿鱼鳞式橡胶顶、铝合金带齿底座、铰接链、弹簧以及间歇圆柱齿组成.当小张开轮伸出时,弹簧被弹开,铰接链从折叠变为伸展,橡胶顶向后滑动,履带拉伸,如图4(a)所示.当小张开轮缩回时,受到弹簧力的作用,履带块儿向中心靠拢,履带紧缩,如图4(b)所示.

图4 弹性分段式履带机构示意图Fig.4 Elastic segmented crawler
1.4 重心控制机构设计
重心控制机构由两路电动推杆以及倾角传感器结合轮椅主框架构成,可以根据轮椅越障的坡度,通过对椅座的角度进行调节,最终达到对轮椅重心进行调节的目的,此重心控制机构在自研制的重心平衡原理样机——自平衡担架平台上已实验成功,重心控制机构模型如图5所示.

图5 重心控制机构模型图Fig.5 Model of center of gravity control
2 平衡控制系统设计
本无障碍轮椅在已设计的无障碍轮椅重心调节机构上,通过简单通用的驱动器(电动推杆),实现相对复杂的重心控制功能.然而,电动推杆不能进行非常精确的推进距离控制,通过电动推杆对角度进行调节时,容易出现控制响应速度慢,以及超调等问题.通过模糊控制的方法解决了上述问题.同时,本系统通过建立一种基于模糊控制模型的转换关系降低了对系统重心计算的复杂度.
控制过程如下:首先,由倾角传感器获得轮椅的倾斜角度并将该倾斜角度输入到”角度-推进距离”转换模块中,从而将倾斜角度转换为左右电动推杆的推进距离.然后,将左右电动推杆的推进距离设置为模糊控制器的两个输入参数,经模糊控制器解算后可将其转化为电动推杆的推进速度,从而调节轮椅的倾斜角度.最后,倾角传感器在轮椅运行期间将保持持续工作状态以随时获得轮椅的当前倾角.控制系统结构图如图6所示.
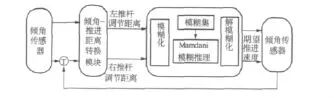
图6 重心平衡控制系统结构图Fig.6 Gravity center control system structure
建立了控制系统结构之后,笔者利用模糊控制算法建立了电动推杆推进距离与推进速度的关系.左右电动推杆的期望调节长度分别命名为LLength以及RLength.左右电动推杆的期望调节速度分别命名为Lspeed以及Rspeed.如表1所示.
根据控制系统结构图,笔者建立了以下仿真模型.电动推杆的期望调节量是系统的两个输入量,其期望调节速度可以通过Scope3示波器观察.电动推杆的最终调节长度可以通过Scope2示波器观察.两个电动推杆的调节收敛时间可以通过Scope1以及Scope4示波器观察.如图7所示.
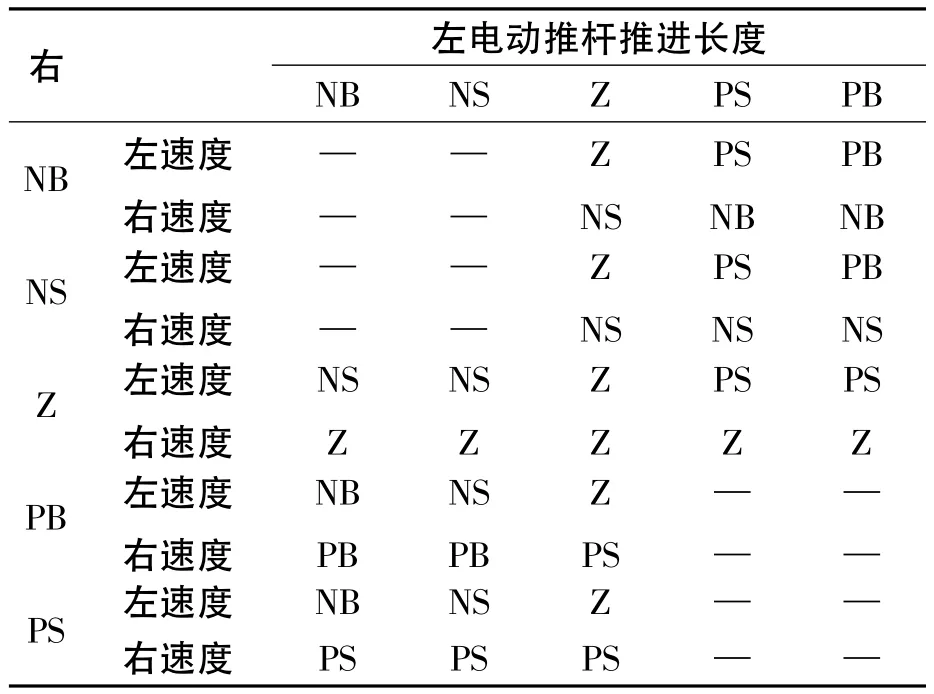
表1 模糊控制规则表Tab.1 Fuzzy rules defination
根据实验,作者将两个电动推杆初始的调节距离设定为-5 cm和4.5 cm,经模糊控制器解算后,电动推杆的调节速度如图8所示.
可以看到,电动推杆的调节速度随着调节距离的变化呈现较为平滑的变化,期望调节距离越大,调节速度越大;期望调节距离减小,调节速度也较为平滑地减小,避免了恒定速度调节带来的控制超调或者调节速度过慢等缺点.
仿真结果表明模糊控制算法可以有效地优化电动推杆的调节过程,进而优化轮椅的重心调节过程.

图7 仿真模型Fig.7 Simulation model

图8 仿真结果Fig.8 Simulation result
3 无障碍轮椅运动特性分析
轮/履耦合移动方式的优越性体现在以低能耗模式的轮式快速运动的特点以及以高越障能力的履带运动的特点,其运动特性在于,这种移动机构本身能够变换自身的结构形式,并未像轮/履复合机构那样带有一套“多余”的运动机构,而且该轮/履耦合移动机构除了在较好路面上快速移动外,也可在瓦砾、废墟和土堆等恶劣、复杂地形上移动作业.此外,配合上述的重心控制机构以及重心平衡控制系统,可以帮助机器人完成跨越沟壑、翻越障碍和攀爬楼梯等动作时,能够起到“杠杆”的作用.轮/履耦合机构的运动模式如图9所示.
4 结论
轮/履结合式移动机构是一种有效的越障途径.然而,通常研究的轮履结合式无障碍轮椅中的辅助履带轮在不使用时无法完全收回,在进行狭窄地形运动时,如楼道、走廊等,会产生很大的不便.

图9 在不同地形上运动示意图Fig.9 Travel on different terrain types
笔者提出的轮/履耦合方式的无障碍轮椅是一种在轮式移动机构内嵌入了履带移动机构,机构内各部件处于关联的相对转动关系,同时能够在小尺寸空间内实现机构的嵌合式的无障碍轮椅,通过对该轮椅的机械结构、控制系统的设计以及运动特性的分析表明,这种无障碍轮椅具有很好的环境适应性和较高的越障能力.
最后,笔者还将重心平衡控制系统在自研制的自平衡担架上进行了实验,实验结果证明,该控制系统能快速准确地对无障碍轮椅进行自平衡控制.
[1]MORALES R,GONZALEZ A,FELIU A,et al.Environment adaptation of a new staircase-climbing wheelchair[J].Autonomous Robots,2007,23(4):275 -292.
[2]MORALES R,FELIU V,GONZALEZ A.Optimized obstacle avoidance trajectory generation for a reconfigurable staircase climbing wheelchair[J].Robotics and Autonomous Systems,2010,58(1):97 -114.
[3]COOPER R A .Wheelchairs selection and configuration[C].IROS 2000,Demos Medical,New York,1998,2000:1113 -1118.
[4]LAWN M J .Study of stair-climbing assistivemechanisms for the disabled[D].Dissertation.Nagasaki U-niversity,2002.
[5]苏和平,王人成.爬楼梯轮椅的研究进展[J].中国康复医学杂志,2005(5):366 -367.
[6]KAMEN D,AMBROGI R,HEINZMANN R.Transportation vehicles and methods[S].US Patent 5 975 225,1999.
[7]Tomo Co.Ltd,Tamagawa University.(2002,May 20).Freedom:http://www.tomo - co.co.jp/free.htm.
[8]JOZAKI T,TANAKA M,LAWN M J,et al.Motored wheelchair applicable to avariety of disabled[C].Proc.Int.l Conf.on Control,Automation and Systems,Jeonbuk,Korea,2002:799 -815
[9]Stair assist wheelchairs and carrier,Hospimedia group,(2002,Sept 24),http://www.hospimedicaintl.com/chair.htm.
[10]YONEDA K,OTA Y,HIROSE S.Development of a hi-grip stair climbing crawler with hysteresis compliant blocks[C].Proc.of 4th International Conference on Climbing and Walking Robots(CLAWAR 2001),2001:569 -570.
[11]HIROSE S,FUKUSHIMA E F,DAMOTO R,et al.Design of terrain adaptive versatile crawler vehicle HELIOS-VI[C].2001 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS 2001),2001:1540 -1545.
[12]LAWN M J,ISHIMATZU T.Modeling of a stairclimbing wheelchair mechanism with high single-step capability[J].IEEE Transactions on Neural Systems and Rehabilitation Research,2003,11(3):323 -332.
[13]Curb skipper,Shoprider Co.Ltd,(2002,Dec 4),http://www.arabmedicare.com/curbskipper.htm
[14]Nagasaki Hillside Association,(2002,Sept 18),http://www1.odn.ne.jp/nha/
猜你喜欢
宝钢技术(2022年4期)2022-12-23
机械管理开发(2022年5期)2022-07-07
机械制造(2022年3期)2022-04-07
兵器装备工程学报(2021年3期)2021-04-09
军民两用技术与产品(2021年10期)2021-03-16
中国核电(2017年1期)2017-05-17
科技视界(2014年6期)2014-12-24
筑路机械与施工机械化(2014年8期)2014-03-01
筑路机械与施工机械化(2014年7期)2014-03-01
筑路机械与施工机械化(2014年5期)2014-03-01
