
GPS 静态相对定位技术在工程测量中的应用
2012-08-20 11:59张凤梧刘亚楠
山西建筑 2012年31期
张凤梧 刘亚楠
(1.三门峡市金土地勘测规划中心,河南 三门峡 472000; 2.水电十三局天津勘测设计研究院有限公司,山东 德州 253000)
1 GPS简介
GPS(Global Positioning System)即全球定位系统,是美国国防部历时23年,于1994年3月28日全面建成的全天候、全球性、连续的卫星无线电导航系统,它可提供实时的三维测速、三维定位和高精度的授时信息。由于GPS定位技术具有速度快、成本低、精度高等显著特点,因此在工程控制网的建立、更新与改造中得到了日益广泛的应用。
1.1 GPS定位系统的组成
GPS定位系统包括三大部分:
1)空间卫星部分;
2)地面监控部分;
3)用户接收部分。
1)GPS空间卫星部分由21颗工作卫星和3颗在轨备用卫星组成。24颗卫星均匀分布在6个轨道平面内,每个轨道面内有4颗卫星运行,卫星距地面的平均高度为20 200 km。6个轨道面相对于地球赤道面的倾角为55°,各轨道面之间的交角为60°,运行速度为3 800 m/s,每颗卫星可覆盖全球38%面积。所以,在地球表面上任何地点任何时刻,在卫星高度角15°以上,平均可同时观测到6颗GPS卫星,最多可观测到11颗卫星。
2)GPS工作卫星的地面监控部分由1个主控站,5个监控站和3个注入站组成。主控站拥有以大型电子计算机为主体的数据收集、计算、传输、诊断等设备,其主要作用是收集各监测站获得的监测数据,并根据所收集的数据计算各卫星的星历、卫星状态、时钟改正、大气传播改正等,并将这些数据编制成导航电文,把导航电文及时传送给注入站,另外主控站还负责检测与协调各监控站和注入站系统是否正常,修正卫星运行轨道等工作。监控站是无人值守的数据自动采集中心,它在主控站的遥控下采集数据,并将算得的伪距、导航数据、气象数据及卫星状态数据传送给主控站,为主控站编算导航电文提供可靠的数据。注入站是无人值守的工作站,它的主要作用是在主控站的控制下,将主控站编算的卫星星历、钟差、导航电文和其他指控指令等注入到相应的卫星储存系统,并检测注入信息的正确性。
3)用户接收部分由GPS接收机、机内软件、数据后处理软件及终端设备(如PC)等组成,其作用是接收、测量、变换、跟踪和解算GPS卫星所发射的GPS信号,以达到导航和定位的目的。
1.2 GPS定位的基本原理
利用GPS进行定位,就是把卫星视为“动态”的控制点,在已知其瞬时坐标的条件下,以GPS卫星和用户接收机天线之间的距离为观测量,进行空间距离后方交会,从而确定用户接收机天线所处的位置。相对定位又称为差分定位,是采用两台以上的接收机(含两台)同步观测相同的GPS卫星,以确定接收机天线间的相互位置关系的一种方法。其最基本的情况是用两台接收机分别安置在基线的两端(见图1),同步观测相同的GPS卫星,确定基线端点在世界大地坐标系统中的相对位置或坐标差(基线向量),在一个端点坐标已知的情况下,用基线向量推求另一待定点的坐标。相对定位可以推广到多台接收机安置在若干条基线的端点,通过同步观测GPS卫星确定多条基线向量。
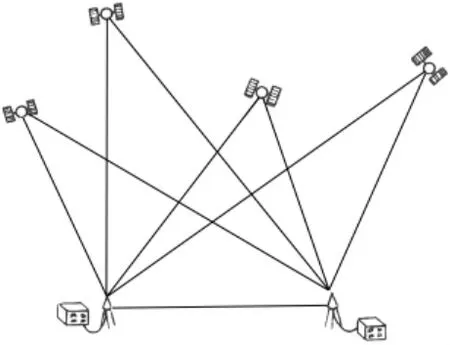
图1 相对定位示意图
由于同步观测值之间有着多种误差,但其影响因素是大体相同的,这些误差在相对定位过程中可以得到消除或减弱,从而使相对定位获得极高的精度。相对定位中,又包括静态定位和动态定位两种方式,其中静态相对定位一般均采用载波相位观测值为基本观测量。这种定位方法是当前GPS测量定位中精度最高的一种方法,在大地测量、工程测量、物探测量、地籍测量等精度要求较高的测量工作中被普遍采用。
2 应用实例
2.1 工程概况
卡塔尔多哈路塞开发项目位于卡塔尔多哈市北郊,工程区域约为7 km长,5 km宽,计划通过场地平整、建造观景海滩、修筑航道护岸等工程来改造目前的海岸线。此工程特点是占地面积广,且地形起伏较大,所以为了提高工作效率,决定采用GPS静态相对定位技术,来建立D级GPS加密控制网。本测区内,现有业主提供的二级控制点 6 个分别为 QT2,QT3,QT4,6007,6006,7003。
2.2 GPS测量的技术依据及精度指标
1)设计依据。a.GB/T 18314-2009全球定位系统(GPS)测量规范;b.CJJ 73-97全球定位系统城市测量技术规程;c.QNG95(卡塔尔国家控制网)和QNHD95(卡塔尔国家高程数据)。
2)精度指标。平面控制网精度要达到D级GPS网要求,相邻控制点几何精度应符合下式要求:

其中,e为固定误差,mm;p为比例误差,mm;s为相邻点间距离,km。
2.3 GPS外业数据采集
严格按照规范要求布设控制网,在布设控制网时以四边形为主,采用边连式构成整网,网中各点分布均匀。D级GPS加密网展点图见图2。
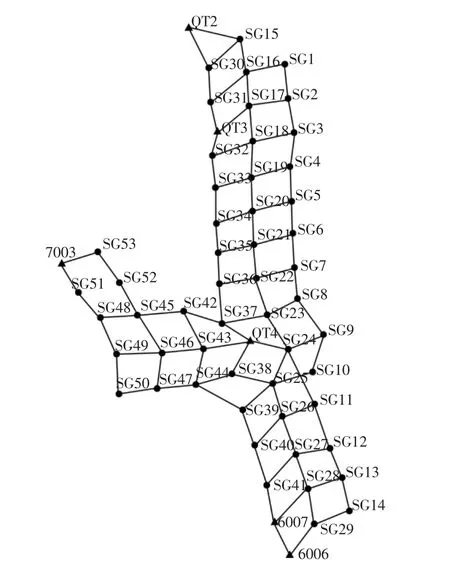
图2 D级GPS加密网展点图
外业观测应按照事先编制好的GPS作业调度表进行,使用4台Trimble R6 GPS接收机(标称精度:水平5 mm+0.5 ppm;垂直5 mm+1 ppm)进行同步观测。具体方法为,以已知控制点6007~6006为控制网起算基准边,分别在 6007,6006,SG28,SG29架设GPS进行同步观测,待各项指标都达到要求时,同时关闭4台GPS,再把架设在6007,6006控制点上的GPS迁到SG13,SG14两控制点,以同样的方法进行同步观测。以此类推,对53个加密控制点进行数据采集,并最后闭合到已知控制点QT2上。为确保GPS网的可靠性,应按照规范规定的操作方法进行观测,天线严格对中整平,开机前和关机后均量测天线高以作校核,一时段观测过程中,严禁将GPS接收机关闭再重启。
GPS D级控制网观测基本技术要求见表1。

表1 D级控制网观测基本技术要求
2.4 GPS数据处理
数据处理用专业GPS数据处理软件TGO(Trimble Geomatics Office)进行基线解算和网平差。基线解算前,先编辑周跳,删除周跳严重的时间段,以保证基线解算结果的质量。经基线解算得知,GPS加密网共观测基线235条,全部解算合格;闭合环数目539个,全部解算通过,Trimble缺省值控制,即比率大于1.5,参考变量小于10,均方差(RMS)<0.03,解算结果均符合规范要求。基线解算合格后,再进行网平差。首先,在WGS84坐标系统下进行无约束平差,根据网平差报告分析独立基线的观测精度和网的内符合精度。然后,在无约束平差通过的基础上进行卡塔尔QNG95坐标系统下的约束平差。约束平差后,基线最大相对误差为1∶162 768,最小相对误差 1∶846 563,平均相对误差 1∶348 082。综上所述,本次施测的D级GPS加密控制网各技术参数均符合《全球定位系统(GPS)测量规范》的规定。
3 结语
通过GPS静态相对定位技术在工程测量中的应用,得到以下几点结论:1)精度高。GPS观测的精度要明显高于传统测量手段,并且接收机基线解算精度为定值,所以,观测距离越大,优势越明显。2)速度快。GPS在数据采集,数据处理方面,高度自动化,让测量工作效率成倍增加。3)全天候。GPS卫星围绕地球24 h工作,所以用户接收机可以全天候的进行数据采集,避免了传统测量工作只能在白天进行观测的缺点。4)布点灵活。传统测量工作,相邻控制点间要相互通视,而GPS则是直接接收卫星信号,所以,控制点间无需通视。
[1] 周建正.GPS定位原理与技术[M].郑州:黄河水利出版社,2005:7.
[2] 徐绍铨,张华海,杨志强,等.GPS测量原理与应用[M].武汉:武汉大学出版社,2008:7.
[3] 刘大杰.全球定位系统(GPS)的原理与数据处理[M].上海:同济大学出版社,1996.
猜你喜欢
高技术通讯(2021年3期)2021-06-09
科学(2020年5期)2020-11-26
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
舰船电子对抗(2016年5期)2016-12-13
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
安徽地质(2016年4期)2016-02-27
