一种结合灰度和边缘信息的局部特征描述算法
2012-08-20 05:19余道丽赵海峰李其超计算智能与信号处理教育部重点实验室安徽合肥230039安徽省工业图像处理与分析重点实验室安徽合肥230039
网络安全与数据管理 2012年6期
余道丽,赵海峰,李其超,罗 斌(1.计算智能与信号处理教育部重点实验室,安徽 合肥230039;2.安徽省工业图像处理与分析重点实验室,安徽 合肥230039)
图像的局部特征具有在多种图像变换下的不变性、无需预先对图像分割和独特性等特点,被广泛应用于物体识别、图像匹配及图像检索等领域。在基于局部特征的匹配方法中,特征描述子的构建是非常重要的环节,一个完备而紧凑的描述子不仅可以较真实地表达特征点所包含的独特信息,而且能降低特征匹配的计算复杂度。
近年来,许多特征描述算法被提出。LOWE D G[1]提出了著名的SIFT描述子,它对图像的各种变换具有较好的鲁棒性,是目前应用最广泛的特征描述算法。KE Y等[2]在SIFT算法的基础上利用主成分分析(PCA)将 SIFT描述子的维数由128降到了20,大幅度提高了匹配速度,但其描述子的独特性不及SIFT算子。OJALA T[3]等人提出的LBP(Local Binary Pattern)算子能够有效地描述纹理特征,它通过计算中心点及周围邻域采样点的灰度差的正负构成一个二进制描述串。与LBP思想类似,Huang Chunrong[4]等提出了对比上下文直方图CCH(Contrast Context Histogram)描述子,利用邻域区域的像素强度之间的线性关系进行特征描述,在对数-极坐标中计算周围每个分块中像素点与中心点之间的灰度差。LBP和CCH算法采用特征点邻域的灰度差异直方图建立特征描述子,降低了算法的复杂度,使得匹配速度有所提高,但是对存在旋转、尺度和视角等变换的图像,鲁棒性有较大的降低。BELONGIE S[5]提出了形状上下文(Shape Context)描述子用于刻画目标的形状,该描述子对于局部区域形变具有不变性,但是在一定程度上对噪声比较敏感。不管是SIFT描述子,还是LBP、CCH或Shape Context描述子,从实现方式上来说,都是基于分布的描述子,利用直方图表征灰度、形状或边缘等特征。基于邻域的灰度分布信息的方法能够很好地描述像素之间的空间位置关系,但是当图像灰度变化或几何畸变较大时就不足以表示图像特征;基于形状或边缘的方法关心邻域的结构信息,但是对噪声比较敏感。Shen Dinggang[6]利用局部空间灰度直方图和边缘信息来共同完成图像配准,通过统计特征点邻域内每个像素的出现频率获得灰度直方图,然后利用Candy算子检测边缘,利用边缘强度表示边缘属性。
本文提出一种同时使用灰度和边缘信息的特征描述子 CSCH(Contrast-Shape Context Histogram)。首先使用对数-极坐标方式划分局部邻域;然后使用CCH方法统计邻域像素强度之间的关系;再使用Canny边缘检测算法和轮廓提取算法获得边界信息,并利用Shape Context算法刻画邻域的边缘信息;最后对灰度信息和边缘信息进行整合,定义信息更为准确、丰富的描述子,增强描述能力。实验表明,结合灰度和边缘信息的描述子,其准确率比单独使用CCH描述子或Shape Context描述子更高,在一定程度上降低了误匹配的概率,同时满足了旋转和光照不变性,对图像灰度变化和噪声不敏感,具有良好的匹配性能。
1 基于直方图的描述子的构建
1.1 CCH描述子
CCH利用邻域区域的像素强度之间的线性关系进行特征描述。首先以特征点pc为中心,采用极坐标划分方式将特征点邻域划分成若干个不相交的区域:R0,R1,…,Rs,然后用直方图方法统计每个区域中的灰度值相异情况。为了增强描述符的独特性,对于每个子区域分别统计正向和负向强度对比值HRi+和HRi-:
其中,c(p)=I(p)-I(pc),#Ri+和 #Ri-分别代表子区域 Ri中像素强度大于和小于中心点的点数和。
最后,生成特征向量CCH(pc),即:

1.2 Shape Context描述子
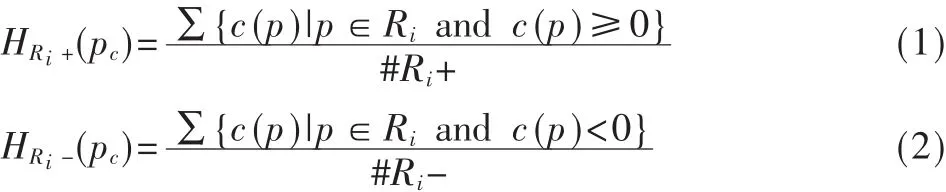
形状上下文描述子的基本思想如下:首先,对于给定的一个形状,通过边缘检测子获取轮廓边缘,对轮廓边缘采样得到一组离散的边界点点集P={pi|i=1,2,…,n},如图1(a)所示;其次,将特征点邻域划分成若干个不相交的区域,形成图1(b)所示的靶状模板;最后,计算模板内各子区域的点的分布数,称为点的统计分布直方图,这些点的统计分布直方图Hp称为点p的形状上下文,如图1(c)所示,其计算公式为:

其中,#表示计数,bin(k)表示第k个扇区。
1.3 描述子的设计
对于每一个被检测到的特征点,建立一个由两部分组成的特征向量:一部分是代表空间灰度分布特性的灰度直方图描述子,另一部分是用来描述邻域边缘特征的Shape Context描述子。因此,每个特征点的特征描述子定义如下:

其中,C是描述灰度分布信息的向量,S是描述区域轮廓信息的向量,ω是相对权重因子。
建立局部不变描述符的前提是有效地划分特征点周围的局部区域,因此,首先对特征点pi采用Shape Context的划分方式,将以pi为中心、R为半径的邻域划分成24个区域,如图2所示。此外,为了保证描述符具有旋转不变性,在极坐标划分中将方向θ=0设定为与pi的主方向[1]一致。

其次,按照CCH思想,统计每个区域中的正向和负向强度对比直方图HRi+和 HRi-,生成特征向量 C,则

然后,使用Canny边缘检测算法获取特征点邻域的轮廓信息,并用Shape Context算法获得特征点的形状上下文直方图S:

最后,为了消除光照变化的影响,分别把C和S进行归一化处理,即:

则特征点pi的特征向量H为:

2 特征向量匹配
当两幅图像的特征向量生成以后,采用欧氏距离作为两幅图像中特征点的相似判定度量。由于特征向量包括两部分,这里分别计算各自的欧氏距离,公式如下:

最终距离为:

为了减少因图片中存在大量相似区域而产生的误匹配关系,算法采用最近邻与次近邻之比来进行匹配。对一幅图像中的某个特征点A,在另一幅图像中搜索与它距离最近和次近的两个特征点B(Dnearest)和C(Dhypo-nearest),并求出最近距离个次近距离之比K:

如果K小于某个阈值,则认为特征点A与距离最近的特征点B匹配。根据参考文献[1]的经验值,本文实验中K的阈值取0.8。
3 实验与结果分析
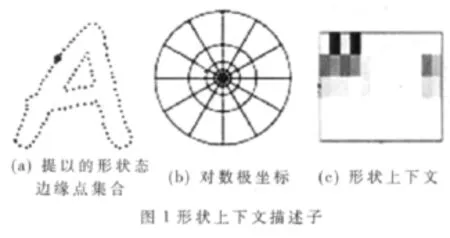
为了验证 CSCH描述子的性能,将 CSCH与CCH、Shape Contxt描述子进行了对比实验。实验中采用的测试图像来自标准数据集和CMU数据库。其中,标准图像数据库中包含了模糊变换、光照变化和JPEG压缩变换条件下的场景图像,CMU数据库中的图像是通过视角变换得到的同一物体的不同图像,部分图像样本如图3所示。为了验证描述子的性能,3种算法都采用Harris检测子[7]分别在每幅图像中提取500个角点。本文主要从正确匹配特征点数、误匹配特征点数和匹配正确率等方面比较算法的性能。
图3(a)所示的测试图像间存在明显的亮度变化,CCH、Shape Contxt和CSCH的匹配性能如表1所示。从表1可以看出,在提取相同数目的特征点的情况下,CSCH算法所找到的正确匹配数目约为CCH算法的1.2倍,为Shape Contxt算法的1.5倍,且匹配正确率高于CCH和Shape Contxt算法。
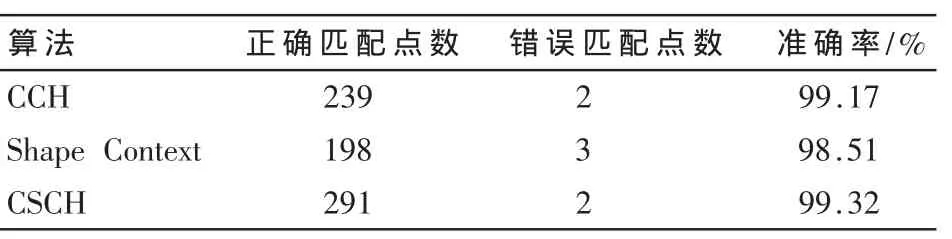
表1 光照变换图像匹配性能比较表
图3(b)是一组改变相机的焦点获得的存在模糊变换的测试图像,CCH、Shape Contxt和 CSCH的匹配性能如表2所示。由于模糊变换影响了像素强度和图像边缘信息,因此,CCH和Shape Contxt算法的匹配性能都较差,而CSCH算法的匹配性能优于二者。
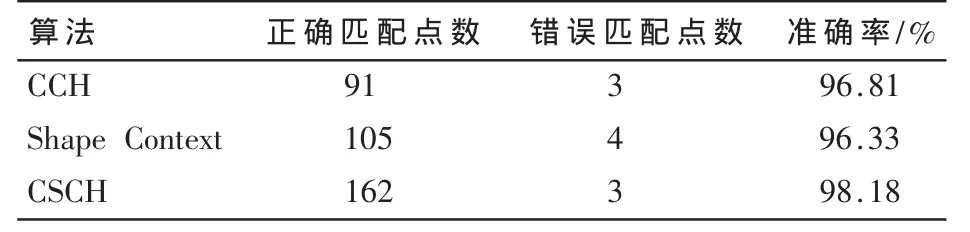
表2 模糊变换图像匹配性能比较表
图3(c)所示的测试图像间存在JPEG压缩变换,CCH、Shape Contxt和CSCH算法的匹配性能如表3所示。从表3可以看出,CSCH算法所获得的正确匹配点数和匹配准确率优于CCH和Shape Contxt算法。
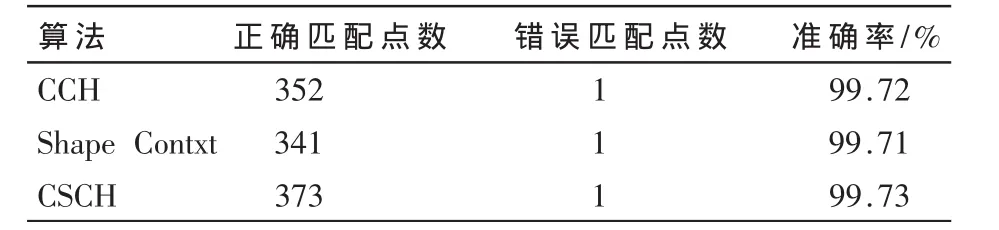
表3 JPEG压缩变换匹配性能比较表
图3(d)所示的测试图像分别是从CMU图像库中抽取的第1帧和第40帧的图像,测试图像间存在着视点变换,3种算法的匹配性能比较结果如表4所示。
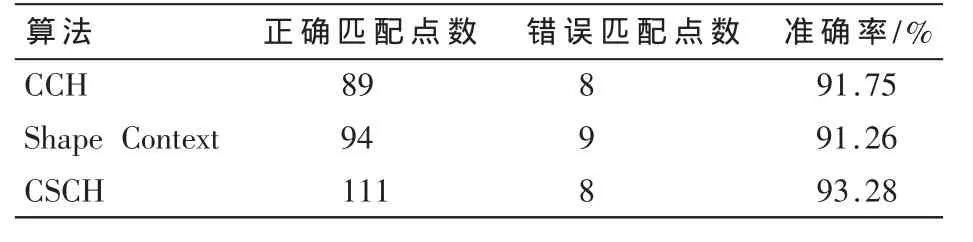
表4 视点变换图像匹配性能比较表
本文针对单一特征引导图像匹配的准确度有限的问题,提出了一种结合灰度和边缘信息的特征描述方法CSCH来描述特征点邻域。利用直方图方法同时表征图像的灰度和边缘信息,所得描述子既能很好地描述邻域像素之间的空间位置关系,又兼顾了邻域的结构信息,并且通过将特征点邻域旋转至主方向获得了旋转不变性,利用特征向量的归一化获得了对亮度变换的鲁棒性。实验表明,利用本文算法提取的特征描述子满足旋转、光照、压缩、模糊和部分视点变换不变性。
[1]LOWE D G.Distinctive image features from scale-invariant keypoints[J].International Journal of Computer Vision,2004,60(2):91-110.
[2]KE Y,SUKTHANKAR R.PCA-SIFT:a more distinctive representation for local image descriptors[C].Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Recognition,Washington D.C.,USA,2004:506-513.
[3]OJALA T,PIETIKAINEN M,HARWOOD D.A comparative study of texture measures with classification based on feature distributions[J].Pattern Recognition,1996,29(1):51-59.
[4]Huang Chunrong,Chen Chusong,CHUNG P C.Contrast context histogram—an effcient discriminating local descriptor for object recognition and image matching[J].Pattern Recognition,2008,41(10):3071-3077.
[5]BELONGIE S,MALIK J,PUZICHA J.Shape matching and object recognition using shape contexts[C].IEEE Transactions on Pattern Analysis and Machine Intelligence,2002,24(4):509-522.
[6]Shen Dinggong.Image registration by local histogram matching[J].Pattern Recognition,2007,40:1161-1172
[7]HARRIS C,STEPHENS M.A combined corner and edge detect or[C].Proceedings of the 4th Alvey Vision Conference,Manchester,UK,1988:147-151.
猜你喜欢
九江职业技术学院学报(2022年1期)2022-12-02
舰船科学技术(2022年20期)2022-11-28
农业工程学报(2022年7期)2022-07-09
保定学院学报(2022年2期)2022-04-07
吉林大学学报(理学版)(2020年3期)2020-05-29
自动化学报(2018年7期)2018-08-20
许昌学院学报(2018年4期)2018-05-02
科技视界(2018年32期)2018-02-21
自动化学报(2017年4期)2017-06-15
中华建设(2017年1期)2017-06-07