测控与雷达天线跟踪方式现状研究及发展趋势
2012-08-14 00:54李强
电子设计工程 2012年14期
李强
(中国电子科技集团公司第39研究所 陕西 西安 710065)
随着航天事业的发展和测控的需求,应用卫星以及航天飞行器越来越多的被送入浩瀚的太空,为了能够更好的了解掌握航天飞行器在轨运行情况,就需要对目标进行精确跟踪。地面测控与雷达天线就是用来实现这一功能,无论天线在发射还是接收状态,都需要精确跟踪目标并给出位置信息。因此跟踪性能的好坏对天线来说极为重要。
目前天线中常用的跟踪方式有:1)和通道步进跟踪(极大值跟踪;2)圆锥扫描体制跟踪;3)单脉冲体制跟踪;4)相控阵扫描跟踪;5)多波束跟踪等,下面对这些常用跟踪方式予以详细介绍和分析比较。
1 和通道步进跟踪(极大值跟踪)
步进跟踪又称极值跟踪,它是一步一步地(通过搜索步和调整步)控制天线在方位面内和俯仰面内转动,对信号强度取样、比较等,经过若干次搜索,使天线逐步对准卫星,直到天线接收到的信号达到最大值后,完成一次跟踪。经过一段时间后,再开始进到跟踪状态,如此周而复始地进行工作。与单脉冲跟踪相比,跟踪精度、跟踪速度都较低,但设备简单,成本低,主要运用于相对静止卫星或目标的跟踪,不适合快速移动目标的跟踪。随着伺服控制技术的日益提高,步进跟踪的精度和效率都得到了提高,已能满足同步卫星跟踪工作要求。
2 圆锥扫描体制跟踪
圆锥扫描(顺序波束)是指波束偏离天线轴向做圆锥状扫描。圆锥扫描是一种扫描方式。在该方式中,射频波束的轴与天线反射器的轴成一斜角并围绕该轴旋转,因而形成一圆锥。圆锥扫描体制跟踪可以同时获得目标的距离、方位角及俯仰角[1]。圆锥扫描波束轨迹如图1所示。
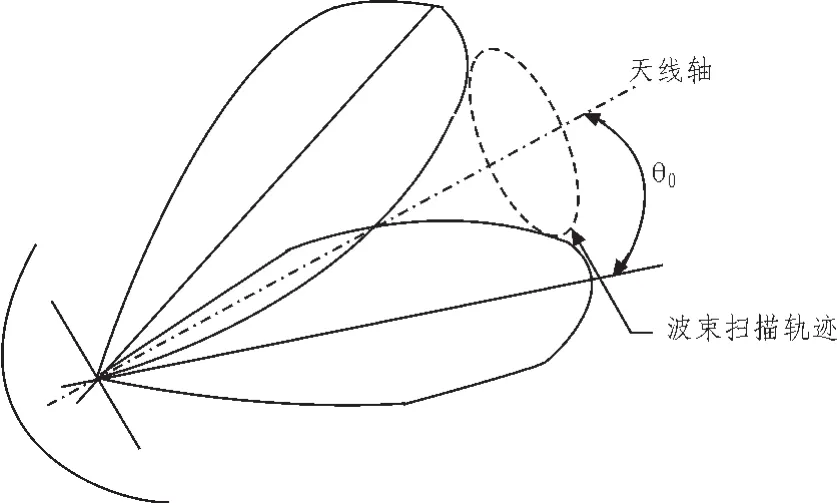
图1 圆锥扫描波束轨迹Fig.1 Conical scanning trajectory
其工作过程大致如下:天线机械轴对准目标时,接收信号强度不变,天线机械轴未对准目标时,则在波束绕天线机械轴转动一周的时间内,接收信号强度有所不同,当波束扫到靠近目标的位置,接收信号最强,当波束扫到远离目标的位置,接收信号变弱,接收信号的大小呈正弦波形状,正弦波的频率与波束旋转的频率一致。即接收信号的正弦变化反映了天线机械轴偏离目标的情况。这时的正弦信号叫误差信号。当波束做圆锥扫描时,带动电机产生方位、俯仰参考信号。其频率与圆锥扫描的频率一致。它们分别送入比较器中和误差信号进行比较。因为参考信号与波束所指的方向是相应的,误差信号与目标偏离机械轴的方向有关系,通过比较器的比较结果,就可以知道目标偏离机械轴的方向,从而产生控制天线转动的信号。控制信号经放大器放大,去控制天线转动,使天线机械轴朝对准目标的方向运动,直至最后使天线机械轴完全对准目标。以上所述就是采用圆锥扫描体制对目标进行自跟踪的过程。
圆锥扫描具有许多优点,它设备简单,工作可靠。其缺点是受动态性能的限制,只能对单个目标进行捕获,同时跟踪精度不高。被方式广泛用于测控引导天线的引导跟踪上。
3 单脉冲自跟踪
单脉冲天线是在第二次世界大战后出现而在五、六十年代迅速发展起来的一种精密跟踪天线。原则上只需要一个回波脉冲就能获得目标的距离和全部角坐标信息,这样就大大加快了提取目标角度信息的速度,而且其跟踪精度、抗干扰能力均优于圆锥扫描体制[2]。
3.1 四喇叭单脉冲跟踪、五喇叭单脉冲跟踪、多喇叭单脉冲跟踪
这几种跟踪方法的实质,在于同时比较几个喇叭(通道)收到的目标回波信号,根据比较的对象可分为比幅单脉冲,比相单脉冲,以及这两种方法的混合方式。它通过对几个喇叭的接收信号进行加减处理得到和路信号、方位差信号及俯仰差信号。当天线对准目标时,差路信号最小,随着目标远离天线轴向,差路信号变大。其中和路信号除了作为发射接收信号之用,同时还要作为参考信号,将目标偏轴所接收到的差信号的极性与它比较,来判断目标偏轴的方向,而差信号的大小则反映了目标偏轴的程度。下面给出五喇叭示意图如图2所示,五喇叭合成网络示意图如图3所示。

图2 五喇叭结构示意图Fig.2 Schematic diagram of horn structure

图3 五喇叭合成网络示意图Fig.3 Schematic diagram of integrate network
一个理想的单脉冲天线应该是距离灵敏度和角灵敏度两个指标都为最佳。这样就要求天线的和增益、差增益及差斜率都达到最大。然而任何馈源都不能使这三项参数同时最大,这就是所谓的和差矛盾,主要是和增益与差增益的矛盾。在设计时必须折中考虑差喇叭的性能,因此四喇叭、五喇叭体制天线的波束效率都不会很高。目前四喇叭及五喇叭跟踪体制主要用于测控、遥测及雷达上。
3.2 差模跟踪
差模跟踪是一种零值跟踪,其基本原理是利用差模电场方向图在天线轴向为零值而在偏轴角度上又有极性的特点来实现自跟踪。差模跟踪是一种高精度的单脉冲自跟踪体制[3]。
差模跟踪并不是单纯依靠差模本身实现,通常还有和模作为基准,因此差模跟踪又叫多模跟踪。常用的几种差模跟踪方式有:
1)TE11模为和模,TM01模为差模的两模自跟踪方式;
2)TE11模为和模,TE21模为差模的两模自跟踪方式;
3)TE11模为和模,TE21、TE01及 TM01模为差模的多模自跟踪方式。这是一种先进的跟踪方式,多模组合的单脉冲自跟踪馈源具有与四喇叭单脉冲馈源相似的差通道性能,然而和通道的性能则由单口径的喇叭性能决定,这就保证了差通道性能的同时最优。也可以说从根本上解决了和差矛盾[4]。
差模自跟踪同多喇叭自跟踪有其相同点,也有不同点。其相同点是:两者都有和方向图和差方向图,两者都是零值跟踪,且偏轴后场方向图具有极性。不同点是:多喇叭自跟踪的差方向图是通过配置外围喇叭(五喇叭)或喇叭分割(四喇叭)来实现的,而差模跟踪是利用波导模式的方向图来实现的。
4 相控阵扫描跟踪
相控阵天线由许多固定的天线单元组成,这些单元相干馈电,并在每个单元上用可变移相器或时延控制使波束扫描到空间特定角度上[5]。相控阵示意图如图4所示。
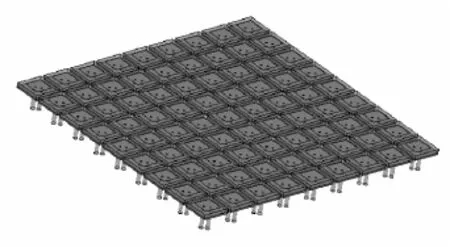
图4 相控阵示意图Fig.4 Schematic diagram of phased array
相控阵天线通过波束扫描的方式来跟踪发现目标。一套波束控制系统按照接收电平跟踪方式确定的相位指令,控制相控阵天线。波束控制的最终目的是通过对每个单元的相位控制,实现波束指向改变的功能,对指定空域进行搜索扫描,完成对目标的发现,识别和跟踪.相控阵天线在其扫描的角度范围内必须做到无栅瓣扫描。相控阵波束扫描示意图如图5所示。

图5 相控阵波束扫描示意图Fig.5 Schematic diagram of beam scanning
波束控制通过控制工作子阵上的移相器的移相量来使相控阵天线的波束指向发生变化。对应于每一个空间角(AZ,EL),有一组固定的移相器控制代码,只要工作子阵上的移相器按这个控制代码产生相应的移相量,则相控阵天线会自动产生一个波束指向(AZ,EL)。
波束指向精度主要取决于数控移相器的移相精度。同时还应考虑移相器的虚位技术,其目的是在于对于给定位数的移相器,如何使波束跃度最小,从而提高波束指向精度。
相控阵天线的主要优势在于能够产生一个电控的可重新定位的方向性波束,采用电子扫描的原理,具有波束形成与瞬间切换功能,以及近乎无惯性跟踪的性能,克服了机械扫描天线的缺点。其缺点是:其馈电系统相当复杂,T/R组件数目多,成本昂贵。
5 多波束跟踪
一般情况下,相控阵系统具有单个输出端,而多波束系统具有多个输出端,每个输出端对应一个波束,其峰值位于空间不同的角度上[5]。
多波束系统在空间可以同时形成很多个波束,各波束之间相互交叠,覆盖一定的空间范围,可在较大范围内跟踪搜索目标。通俗地讲,相当于每个单元波束负责对应的空间小范围,当目标出现时,哪个单元波束收到信号最大,则目标就在该单元对应的空间范围,因此可以得知目标的位置所在。从而多波束系统可在较大的空间范围内实现跟踪功能。一种多波束示意图如图6所示。波束相交示意图如图7所示。
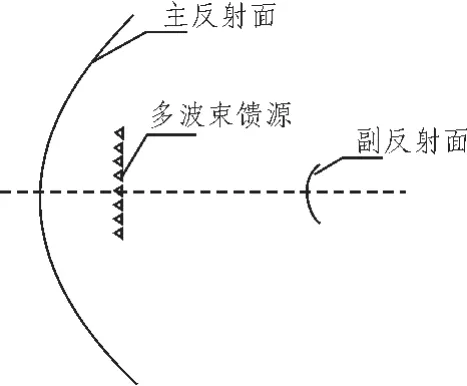
图6 多波束天线示意图Fig.6 Schematic diagram of multi-beam antenna

图7 波束相交示意图Fig.7 Schematic diagram of beam intersects
多波束系统具有高的“波束交叠电平”是十分重要的,这样一来,在天线视场的任何一点上几乎都可以得到系统的整个增益。波束交叠电平是两个相邻波束在其交叠点处的相对增益。一般来说,交叠电平低于波束峰值约4 dB,这取决于所希望的副瓣和系统损耗。多波束形成网络应该是无耗,或小损耗,以便在增益降低时不会影响整个系统的正常应用。以下介绍几种多波束天线。
5.1 相控阵多波束卫星通信天线
相控阵天线主要通过馈电单元的相位控制使天线提供多波束,其馈电系统相当复杂,成本昂贵。
5.2 多反射面的多波束抛物面天线
多反射面天线的多波束抛物面天线,就是利用抛物面天线在三到五个波束内具有波束扫描能力,使用多个抛物面实现所需要的波束覆盖。其技术成熟,指标易得到满足,但需多个反射面天线。由于反射面多,使整个天线系统庞大且控制相对复杂。
5.3 卡式天线实现多波束功能
利用馈源的横向偏焦引起波束偏移的原理,由多喇叭馈源阵列形成多个偏轴波束,将其应用在卡式天线上,实现多个波束。其优点是可在较大的空间范围实现跟踪搜索功能,展宽波束范围。但当天线不动时,其波束不能扫描,其波束的最大值不可能覆盖空间的每一个点位,跟踪精度不高,为加密波束,单位面积内喇叭数目需增多,喇叭口径减小,单元增益降低。因此必须在两者之间折中考虑。
因此该体制一般被用于引导跟踪功能。在多波束引导喇叭正中放置主馈源,主馈源用于发射、接收及高精度的跟踪。当系统工作时,根据目标的轨道预报数据,快速扫描空域范围,当引导多波束发现目标后快速切换给主波束,再由主波束进行更为精确的跟踪。这种方式的特点是加工制造方便,波束覆盖范围广。缺点是主馈源与引导馈源的性能不能同时达到最佳,必须在两者之间折中考虑[6]。
5.4 抛物环面天线
抛物环面天线是一段抛物线绕与其焦轴成π/2+α角的一个轴线旋转而成的曲面。它把抛物面的聚焦性能和球面天线的宽角扫描性能集一身,在一个平面内或圆锥面内可实现宽角波束扫描或多波束性能,且各个波束性能都一样。其利用了抛物面的聚焦性能和球面天线的宽角扫描性能,天线性能显著提高。从结构上讲,抛物环面天线对卫星的跟踪是依靠形成对应波束的馈源系统的运动来实现的,这就省去了天线反射面驱动装置,为了避免馈源系统对天线的遮挡。抛物环面天线通常采用上偏置结构,馈源系统安装在与天线分离的支架上,便于维修。由于没有座架,省去了旋转反射面时用的电机和轴系结构,整个结构成本低,同时也改善了近轴旁瓣特性,降低初级馈源的驻波比及多馈源间的相互耦合。示意图如图8所示。

图8 抛物环面天线侧视示意图Fig.8 Side-view schematic diagram of parabolic torus antenna
5.5 带副反射面的抛物环面天线
虽然抛物环面天线具有许多优点,但当抛物环面天线工作频率较高时,边缘相差变大致使性能变差。为了解决这一问题,采用抛物环面天线主面配一个副反射面,利用所配的副面起到修正边缘相差的作用,从而使天线性能得到改善。所以对于大型抛物环面天线,当工作频率增加时,宜采用带有副反射面的抛物环面天线方案。示意图如图9所示。

图9 带副面的抛物环面天线侧视示意图Fig.9 Side-view schematic diagram of subreflector parabolic torus antenna with subreflector
6 结束语
随着未来环境的复杂、多变以及航天技术的发展,需求也越来越高:1)天线口径越来越大,使用的频率越来越高;2)跟踪多个目标;3)跟踪窄波束快速目标。利用常规的跟踪体制极有可能会丢失目标,而相控阵天线和多波束天线均可在大范围内捕获目标,加之世界诸多发达国家和军事强国都竞相在多波束及相控阵的研发当中投入更多的精力和财力,它们将在新世纪的跟踪技术中占据主导地位,成为主要的跟踪手段。鉴于跟踪技术的发展走向,需要我们适时的调整技术研发战略,加大研究多波束及相控阵技术,逐渐缩小与发达国家在该技术领域差距,使我国科技研发真正处于领先地位,屹立于世界强国之林。
[1]陈静.雷达无源干扰原理[M].北京:国防工业出版社,2009.
[2]黄立伟,金志天.反射面天线[D].西安:西北电讯工程学院,1986.
[3]杨可忠,杨智友,章日荣.现代面天线新技术[M].北京:人民邮电出版社,1993.
[4]沈泉.C+C馈源的工作原理与特点[C]//中电集团三十九所第三界科技大会论文集,2009:6-12.
[5]Mailloux R J.北京:相控阵天线手册[M].北京:电子工业出版社,2008.
[6]赵双萍,李向伟,邢敬宏.基于物联网的测控系统关键技术概[J].工业仪表与自动化装置,2012(1):13-16,34.ZHAO Shuang-ping,LI Xiang-wei,XING Jing-hong.Study on key technology of measurement and control system based on the Internet of things[J].Industrial Instrumentation&Automation,2012(1):13-16,34.
猜你喜欢
北京航空航天大学学报(2020年3期)2021-01-14
科技传播(2019年22期)2020-01-14
科教新报(2019年16期)2019-09-10
科学导报(2019年24期)2019-09-03
数学物理学报(2018年4期)2018-09-14
环境技术(2017年4期)2017-11-08
电子制作(2017年10期)2017-04-18
测绘科学与工程(2016年5期)2016-04-17
制导与引信(2016年3期)2016-03-20
电源技术(2015年9期)2015-06-05