艇载共形稀疏阵列天线雷达成像研究
2012-07-30 06:48滕秀敏李道京
电波科学学报 2012年4期
滕秀敏 李道京
(1.中国科学院电子学研究所微波成像技术重点实验室,北京100190;2.中国科学院研究生院,北京100190)
引 言
在20km以上高空可长时间驻留的平流层飞艇,在通信服务、高空侦察和区域预警等领域有着广阔的应用前景。平流层飞艇巨大的体积为使用大尺寸天线实现实孔径成像提供了条件,但是大尺寸天线需要大量的天线单元和接收通道,同时天线波束还需要扫描以扩大观测范围,因而使得雷达系统的体积重量和复杂度均大大增加。采用具有稀疏特点的综合孔径天线有可能解决上述问题[1]。
目前关于平流层飞艇载雷达成像和探测研究的公开报导较少。文献[2-3]基于平流层飞艇平台,采用置于艇身底部的线性稀疏阵列天线,研究了对地观测成像和对运动目标探测的问题。
但上述研究工作未考虑艇身外形的特点,主要采用置于艇身外部的线性稀疏阵列天线。考虑到目前设计的平流层飞艇艇身大都呈“水滴”型,常见的有近似椭圆形、纺锤体系列和玫瑰线系列等[4]。本文利用共形天线的概念[5-6],将稀疏阵列天线嵌入到艇身中,使之成为系统的一部分。
雷达各子阵同时发射多脉冲频分正交信号,对静止目标成像时,利用子阵时分轮发的方式,对各子带的回波信号采用后向投影(BP)算法[7]实现对静止目标成像。由于各子阵轮发不同频率的子带信号,耗费时间较长,对运动目标探测时还存在问题。
近年来提出的压缩感知理论可以利用较少的随机采样数据实现对稀疏场景的重建[8-11]。在运动目标存在的场景中,静止杂波被抑制后,场景变为只有运动目标存在的稀疏场景,具备运用压缩感知方法的条件。因此,可利用一发多收的多脉冲回波信号,在多普勒域中完成静止杂波抑制,再通过压缩感知方法来实现运动目标图像的重建。
基于平流层飞艇平台,研究了共形稀疏阵列天线雷达对静止目标成像及对运动目标探测的问题。
1 成像模型及共形稀疏阵列天线布局
艇载共形稀疏阵列天线雷达系统的成像几何模型如图1所示。X-Y(方位向-地距向)平面为成像平面,稀疏阵列天线沿X轴方向分布在艇身底部,即共形稀疏阵列天线分布在X-Z平面,飞艇悬停高度为H.

图1 艇载共形稀疏阵列天线雷达系统成像几何模型
考虑目前设计的平流层飞艇艇身大都呈“水滴”型的特点,采用三叶玫瑰线来近似表示艇身外形(图2中的轮廓线)。三叶玫瑰线在极坐标下的表达式为

为获得与艇身共形的稀疏阵列天线布局,采用将一维线阵拓展到二维曲线上形成共形阵列布局的方式,如图2所示。利用文献[12]中提出的线性阵列天线的稀疏优化方案,采用模拟退火算法优化稀疏阵列天线在直线上的位置。设计原则是在各子阵多发多收的条件下,利用最少数量的真实子阵天线,来获得与满阵天线相同的相位中心分布。用上述方法得到稀疏阵列各子阵在直线上的位置后,再将其分别投影到三叶玫瑰线上,来获得与艇身底部共形的稀疏阵列天线布局。

图2 共形稀疏阵列天线布局示意图
2 系统收发方案
共形稀疏阵列天线采用实孔径雷达的信号采集模式,系统工作在多发多收状态,各子阵同时发射多脉冲频分正交信号。各子阵的发射信号为不同中心频率的线性调频信号,定义为子带信号。各子带信号的中心频率间隔等于子带信号的带宽[13],第k个子带信号的中心频率可表示为

式中:Bs为子带信号的带宽;f0为系统的工作频率;M为子带信号的数量。
第k个子带信号可以表示为

式中:Tp为子带信号的脉冲宽度;Kr为调频率。
由于要同时实现对静止目标成像和对运动目标探测,系统所采用的信号发射方案如图3所示,各个子阵发射多脉冲频分正交信号。其中,各子阵同时发射频分正交信号,且各子带信号在每个子阵位置上轮发一次的回波信号,可用来实现静止目标成像。而发射多脉冲信号则可用于运动目标探测。在图3中,纵坐标编号代表各子阵在方位向的编号,横坐标为慢时间轴。假设系统的脉冲重复频率为PRF,发射脉冲的时间间隔1/PRF,发射同频子带信号的多脉冲数量为N.
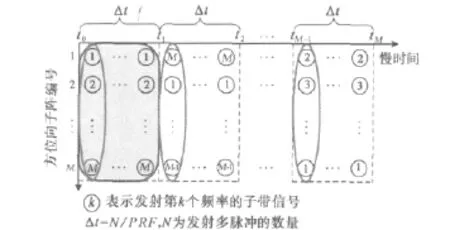
图3 子阵发射多脉冲频分正交信号方式示意图
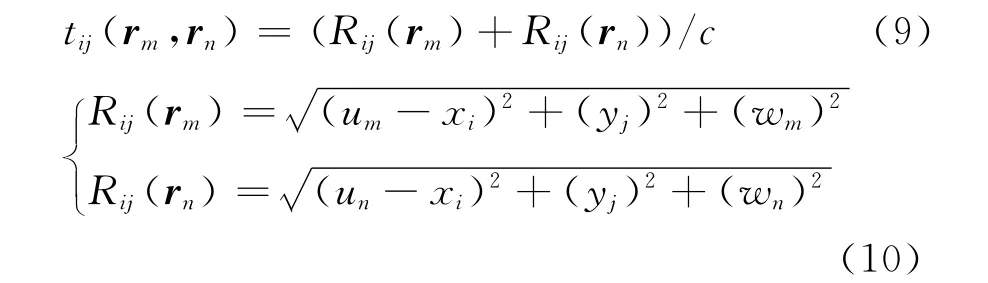
由于子阵天线位于Y=0的X-Z平面中,因此,可令第m 个子阵的空间位置为rm= (um,0,wm),假设被观测场景中第i个散射点的空间位置为Pi= (xi,yi),则对于第k个频率的子带信号,由第m个子阵发射,第n个子阵接收的回波信号可以表达为

式中,τ(rm,rn,Pi)表示发射信号从发射子阵rm经散射点Pi到接收子阵rn的延时。


3 对静止目标成像
对静止目标成像时,主要利用各子阵多发多收的回波信号(图3中椭圆形所包含的回波信号)。根据前文中所述的共形稀疏阵列天线位置的获取原则,对于各子阵多发多收的回波信号,各子带信号在每个子阵位置轮发一遍,根据等效相位中心原理,每个子带信号都可在方位向上获得一个等效满阵。由于子阵与艇身共形布设,由多发多收回波信号获得等效相位中心的空间位置不能等效为直线阵列。因此,考虑采用与阵列构型无关的BP算法对回波信号进行成像处理,可获得与满阵天线相同的成像结果。
对于第k个频率的子带信号,由第m个子阵发射,第n个子阵接收的回波信号经距离向匹配滤波后的表达式为

式中:⊗代表卷积运算;p*k(-t)为第k个子带信号pk(t)的共轭反转表达式。
则对于第k个频率的子带信号,其在二维成像平面中采样点(xi,yj)处的目标函数可表示为

式中:
对于每个子带信号通过上述方法均可得到一幅距离向分辨率较低的图像,将所有子带信号成像结果相参累加,可提高图像的距离向分辨率[14]。
4 对运动目标探测
对运动目标探测时,考虑使用传统的脉冲多普勒雷达信号处理方法,利用每个子阵一发多收的同频多脉冲回波信号(如图3中矩形所包含的回波信号),在距离-多普勒域中,通过滤除零多普勒频率信号就可以实现静止杂波抑制,获得只有运动目标存在的稀疏场景。与此同时,在距离-多普勒域中还可以实现运动目标的检测和测速。具有相同径向速度的运动目标回波信号位于同一多普勒通道,抽取运动目标所在的多普勒通道数据,即可在X-Y(方位向-地距向)二维空间实现运动目标图像的重建。由于本文采用了稀疏阵列天线,所以各子阵一发多收的回波信号在方位向是稀疏采样的,采用传统成像方法进行处理时,存在旁瓣较高的问题。为此,采用压缩感知的方法实现对运动目标图像的重建,以避免旁瓣较高的问题。各子阵同时发射不同频率的子带信号,可将各子带信号重建的结果非相参累加,以提高运动目标探测的信噪比。
由于文中所用阵列呈曲线分布,并且阵列较长,会造成较大的距离徙动。虽然距离向数据不是稀疏的,但是为了避免复杂的距离徙动校正处理,利用基于压缩感知理论的方法直接对二维回波信号(距离向-方位向)进行处理。下面详细介绍运用压缩感知方法实现运动目标图像重建的过程。
将待重建的图像区域划分为Nx×Ny个网格单元,每个单元代表一个散射点。假设第nx行、第ny列散射点Pnx,ny=(xnx,yny)的散射系数为σnx,ny,待重建图像可以表示为

第m个子阵发射频率编号为k的线性调频信号时,所有子阵接收的回波信号构成测量数据
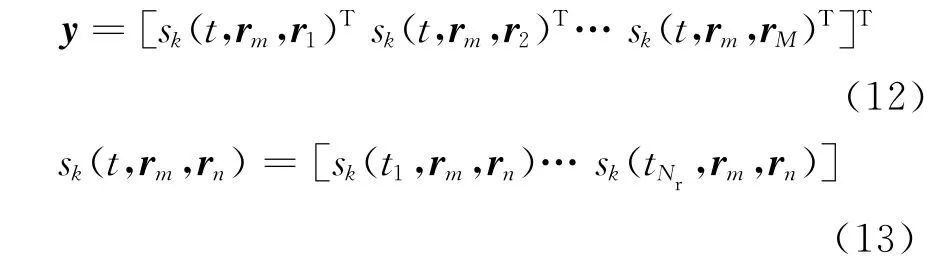
式中:Nr为距离向采样点数;m,n=1,…,M.
根据回波信号的生成方式即可得到大小为(M×Nr)×(Nx×Ny)的观测矩阵Φ
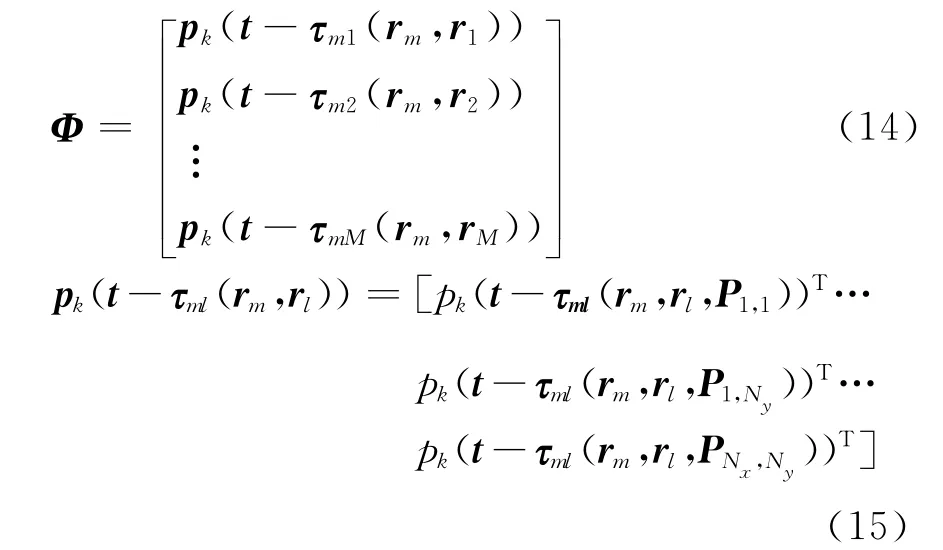
式中l=1,2,…,M.
无噪声的观测方程可以表示为

存在噪声的情况下,观测方程(16)可以表示为

式中e是能量受限(‖e‖2≤ε)的未知噪声。
通过求解下面的ℓ1范数最小化问题

即可实现运动目标图像的重建。
观测矩阵Φ满足约束等容性(RIP)条件,即如果待恢复信号θ是K稀疏的信号(只有K个非零元素的信号称为K稀疏的信号),对于任意T(|T|≤K)稀疏信号xT,应满足不等式

式中δK∈ (0,1).
在观测矩阵Φ满足上述RIP条件下,式(18)中的ℓ1范数最小化问题可解。文中采用贪婪追踪算法中的正交匹配追踪(OMP)[15]来求解。求解得到的θ经重新排列后即为待重建的运动目标图像。
5 仿真实验
假设飞艇艇身长度为150m,即令三叶玫瑰线模型中a=150.飞艇平台的悬停高度为22km,波束入射角为45°,在波束扫描角为0°时,斜距约为31 km.系统采用可扫描的子阵结构,以扩大成像范围。详细的系统参数如表1所示。
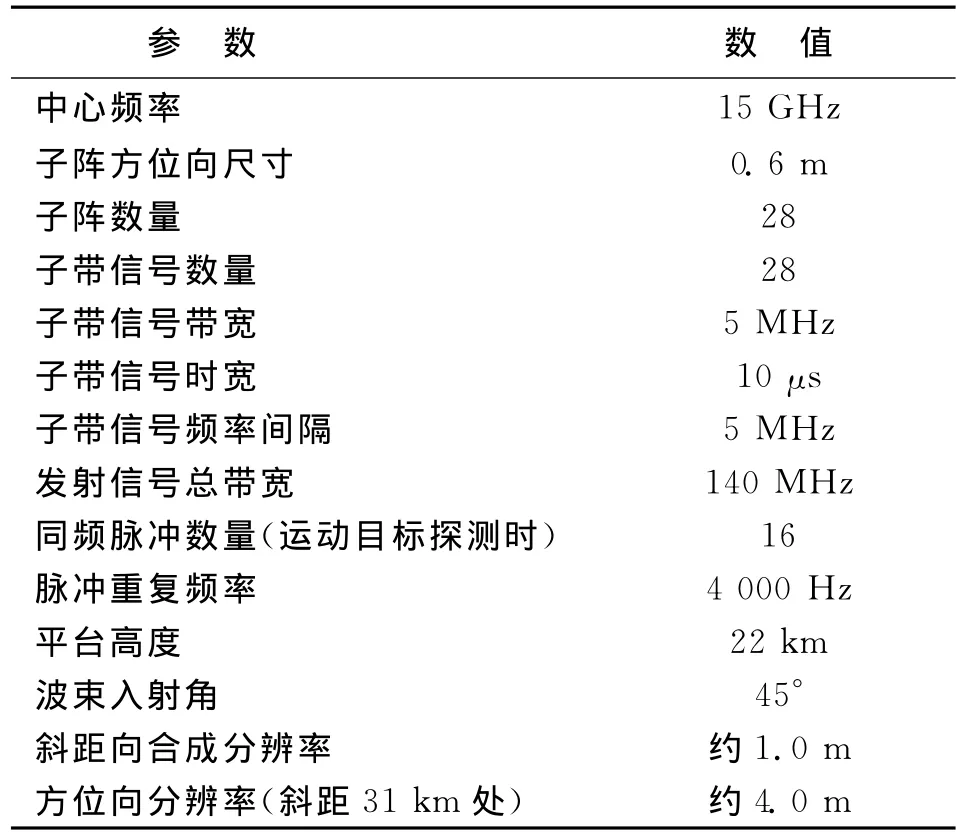
表1 仿真参数
利用前文所述的模拟退火算法对28个子阵在直线上的位置进行优化,优化后最多可占据132个空间位置,分别为:1,2,4,5,6,9,12,16,17,26,35,44,53,62,71,80,89,98,107,116,117,121,124,127,128,129,131,132.再将稀疏阵列各子阵在直线上的位置投影到三叶玫瑰线上,即可获得与艇身共形的布局结构。
子阵方位向尺寸为0.6m,方位向等效满阵长度为78.6m.各子阵天线多发多收时,在方位向上可获得263个等效相位中心,构成间隔为0.3m的等间隔分布满阵天线。对静止目标成像时,采用BP算法可获得与满阵天线相同的成像结果。对运动目标探测时,子阵天线一发多收,回波信号在方位向是稀疏采样的,可通过压缩感知的重建方法避免稀疏阵列天线成像旁瓣较高的问题。
5.1 静止目标成像仿真
利用表1中系统参数,分别对波束扫描角为0°和45°场景中的点目标进行成像。场景中设置9个点目标,利用BP算法进行成像的结果如图4和图5所示。

通过图4(a)和图5(a)可以看出,由于子带信号为窄带信号,因此子带信号成像结果的距离向分辨较低。将28个子带信号的成像结果进行相参累加可提高静止目标成像的距离向分辨率,如图4(b)和图5(b)所示。
5.2 运动目标探测仿真
分别对波束扫描角为0°和45°的情况进行仿真,设置9个静止目标和5个运动目标,静止目标和运动目标的相对位置如图6所示。
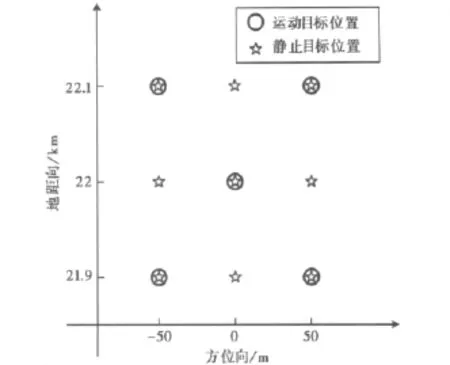
图6 运动目标与静止目标相对位置示意图
假设各个运动目标的速度相同,方位向速度为0m/s,地距向速度为25m/s.
由于采用压缩感知的方法对运动目标图像进行重建,而该方法对于待重建信号中的噪声干扰情况有一定的要求。文中分别在无噪声和存在噪声的情况下进行了对运动目标图像重建的仿真实验。
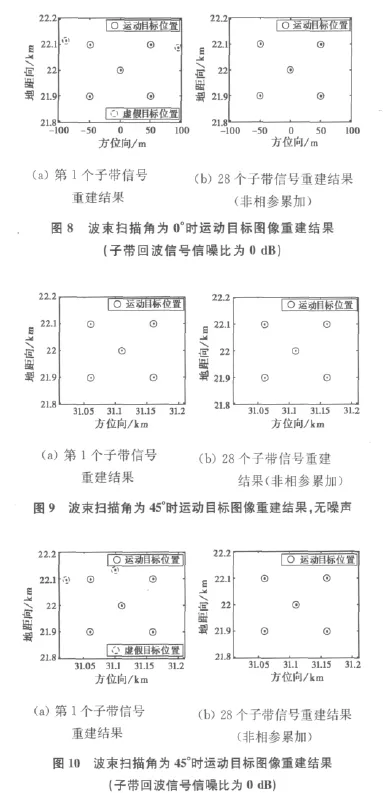
对波束扫描角为0°和45°的场景,分别在无噪声干扰和子带回波信号中存在0dB噪声干扰(信噪比为0dB)的情况下用压缩感知的方法对运动目标图像进行重建,仿真结果如图7、图8、图9和图10所示。

图7 波束扫描角为0°时运动目标图像重建结果,无噪声
当回波信号无噪声干扰时,用压缩感知的方法对子带信号可以较好的实现运动目标图像的重建,同时确定运动目标的真实空间位置。当回波信号中存在噪声干扰时,子带信号重建的结果中存在一些虚假目标,但通过28子带信号重建结果的非相参累加,可以有效地抑制虚假目标的干扰。仿真结果表明该方法对于子带信号中存在一定噪声干扰时仍然有效。
6 结 论
本文研究了基于平流层飞艇的共形稀疏阵列天线雷达对静止目标成像以及对运动目标探测的问题。提出了基于三叶玫瑰线艇身模型的布阵方式,实现了阵列天线与艇身的共形布局。各子阵同时发射多脉冲频分正交信号,利用多发多收的回波信号,采用与阵列构型无关的BP算法完成各子带信号对静止目标的成像,并将各子带信号的成像结果相参累加以提高图像距离向分辨率。利用一发多收的多脉冲回波信号,经静止杂波抑制后获得稀疏的场景,采用压缩感知的方法完成子带信号对运动目标图像的重建,并将各子带信号的重建结果非相参累加提高运动目标探测的信噪比。本文的研究工作对艇载阵列天线成像雷达的研制具有重要的参考价值。
[1]LI Daojing,HOU Yingni,HONG Wen.The sparse array aperture synthesis with space constraint[C]∥8th European Conference on Synthetic Aperture Radar(EUSAR 2010).Germany,2010:950-953.
[2]侯颖妮,李道京,尹建凤,等.基于稀疏综合孔径天线的艇载成像雷达研究[J].电子学报,2008,36(12):2377-2382.HOU Yingni,LI Daojing,YIN Jianfeng,et al.Airship imaging radar based on aperture synthesis of thinned array[J].Acta Electronica Sinica,2008,36(12):2377-2382.(in Chinese)
[3]HOU Yingni,LI Daojing,HONG Wen.Airship radar imaging for stationary and moving targets based on thinned array and code division signal[C]∥2nd Asia-Pacific Conference on Synthetic Aperture Radar(APSAR 2009).China,2009:622-625.
[4]夏中贤.平流层飞艇总体性能与技术研究[D].江苏南京:南京航空航天大学,2006.XIA Zhongxian.Research on performance and technology of stratospheric airship[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2006.(in Chinese)
[5]欧阳骏,杨 峰,聂在平,等.基于遗传算法的载体上共形天线阵列优化[J].电波科学学报,2008,23(2):356-359.OUYANG Jun,YANG Feng,NIE Zaiping,et al.Optimizing design of conformal antennas array on platform with GA method[J].Chinese Journal of Radio Science,2008,23(2):356-359.(in Chinese)
[6]张玉洁,龚书喜,王文涛,等.基于改进遗传算法的非规则共形阵的研究[J].电波科学学报,2010,25(4):689-695.ZHANG Yujie,GONG Shuxi,WANG Wentao,et al.Research on irregular conformal array using improved genetic algorithm[J].Chinese Journal of Radio Science,2010,25(4):689-695.(in Chinese)
[7]SOUMEKH M.Synthetic aperture radar signal processing with MATLAB algorithms[M].New York:Wiley-Interscience,1999.
[8]DONOHO D.Compressed sensing[J].IEEE Transactions on Information Theory,2006,52(4):1289-1306.
[9]TELLO M,LÓPEZ-DEKKER P,MALLORQUÍJ J.A novel strategy for radar imaging based on compressive sensing[J].IEEE Transactions on Geoscience and Remote Sensing,2010,48(12):4285-4295.
[10]侯颖妮,李道京,洪 文,等.稀疏阵列微波暗室成像实验[J].电子与信息学报,2010,32(9):2258-2262.HOU Yingni,LI Daojing,HONG Wen,et al.Thinned array imaging experimental study in anechoic chamber[J].Journal of Electronics &Information Technology,2010,32(9):2258-2262.(in Chinese)
[11]黄 琼,屈乐乐,吴秉横,等.压缩感知在超宽带雷达成像中的应用[J].电波科学学报,2010,25(1):77-82+202.HUANG Qiong,QU Lele,WU Bingheng,et al.Compressive sensing for ultra-wideband radar imaging[J].Chinese Journal of Radio Science,2010,25(1):77-82+202.(in Chinese)
[12]侯颖妮.基于稀疏阵列天线的雷达成像技术研究[D].北京:中国科学院电子学研究所,2010.HOU Yingni.Study of radar imaging technology based on sparse array antenna[D].Beijing:Institute of Electronics,Chinese Academy of Sciences,2010.(in Chinese)
[13]LORD R T,INGGS M R.High resolution SAR processing using stepped-frequencies[C]∥1997IEEE International Geoscience and Remote Sensing Symposium(IGARSS 1997).Singapore,1997:490-492.
[14]HAN Bing,DING Chibiao,LIANG Xingdong,et al.A new method for stepped-frequency SAR imaging[C]∥6th European Conference on Synthetic Aperture Radar(EUSAR 2006).Germany,2006.
[15]TROPP J A,GILBERT A C.Signal recovery from random measurements via orthogonal matching pursuit[J].IEEE Transactions on Information Theory,2007,53(12):4655-4666.
猜你喜欢
电子技术与软件工程(2022年8期)2022-07-08
成都信息工程大学学报(2022年2期)2022-06-14
成都信息工程大学学报(2021年6期)2021-02-12
舰船电子对抗(2019年4期)2019-09-10
数学年刊A辑(中文版)(2019年1期)2019-01-31
太空探索(2016年12期)2016-07-18
百科探秘·航空航天(2015年12期)2015-11-07
百科探秘·航空航天(2015年11期)2015-11-07
百科探秘·航空航天(2015年10期)2015-11-07
土木建筑工程信息技术(2013年5期)2013-10-17