基于指数时变滑模的再入飞行器控制系统设计
2012-07-25 07:58:40王亮刘向东盛永智丛炳龙
飞行力学 2012年6期
王亮,刘向东,盛永智,丛炳龙
(1.北京理工大学自动化学院,北京 100081;2.北京理工大学复杂系统智能控制与决策重点实验室,北京 100081)
引言
对于再入飞行器来讲,再入过程中飞行条件大范围变化,各通道间耦合严重,存在各种不确定性扰动以及飞行器的气动特性不能精确获知,这些因素导致其姿态控制变得异常复杂[1]。为了抑制上述非线性、强耦合和不确定性的影响,为其设计高性能、强鲁棒的姿态控制系统就显得十分必要。
滑模变结构作为一种非线性控制方法,当系统处于滑模面上时,对存在的匹配参数不确定性以及扰动具有强鲁棒性[2],因此在再入飞行器控制系统中有着广泛应用[3-4]。然而,当采用普通滑模控制时,在到达段滑模控制并不具有鲁棒性,容易受系统自身参数不确定性以及外部扰动的影响。为了缩短甚至消除到达阶段,文献[5-6]提出了时变滑模的概念,以时变滑模面替代时不变滑模面,使滑模面在初始时刻就穿过系统的初始状态,以旋转或者平移的方式随时间趋近事先确定的时不变滑模面。
本文在考虑了模型参数不确定性以及外部扰动情况下,针对再入飞行器姿态控制系统的设计问题,在飞行器反馈线性化模型的基础上,设计了一种基于指数时变滑模的全局鲁棒控制器。最后,通过Matlab仿真验证了所设计的再入飞行器姿态控制律的有效性。
1 问题描述
1.1 再入飞行器模型介绍
本文采用文献[7]描述的面对称无动力再入飞行器模型,再入时主发动机已关闭,仅靠气动舵面来提供操纵力和操纵力矩。
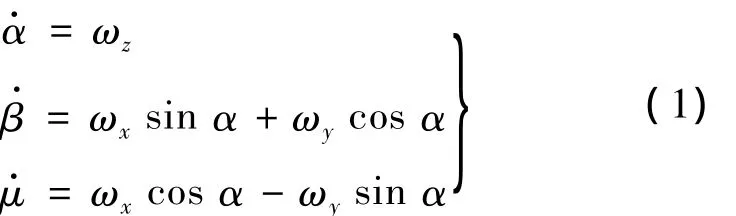
再入过程中采用BTT控制,侧滑角β保持在零附近,因此 sinβ≈0,tanβ≈0,cosβ≈1。并根据文献[7]中的假设,得到简化的姿态运动学方程。绕质心转动的运动学方程为:
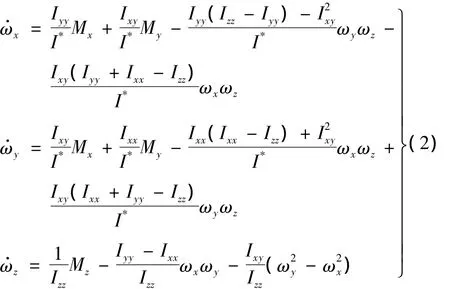
绕质心转动的动力学方程为:


1.2 反馈线性化
首先,将式(1)、式(2)描述的再入飞行器运动学方程转化为通用的MIMO非线性仿射系统的形式:

式中,x=[αβμωxωyωz]T为系统状态变量;y=[y1y2y3]T=[αβμ]T为系统输出变量;U=[u1u2u3]T=[MxMyMz]T为计算所得气动控制力矩。在得到所需的气动控制力矩后,舵面偏转角指令可根据式(3)计算求得。
然后,应用输入输出线性化理论[9],计算出系统输出相对于控制量的相对阶都为2,则系统的总相对阶为2+2+2=6,与系统的阶数相同。所以此非线性系统可以完全线性化,闭环系统中不存在内动态。输入输出反馈线性化的计算结果如下:

式中,F(x),E(x)的具体表达式见文献[10]。
通过计算可得:det(E(x))=-1/(I*Izz)≠0,因此可知E(x)可逆。此时,选择控制律形式为:

式中,v=[v1v2v3]T为辅助控制量。
将式(6)代入式(5)中,系统输出动态可以写为如下解耦的积分器形式:
式中,Ω =[αβμ]T。
进一步,考虑再入飞行过程中可能存在的参数不确定性(包括转动惯量和气动参数)以及外部扰动情况,假设受扰情况下的系统模型表示为:

式中,f,gk为系统的标称部分;Δf,Δgk为系统中的不确定部分;为了简便省略了函数中的自变量x。考虑参数不确定性及扰动后,经反馈线性化的系统模型可表示为:

这里,用 Δv=[Δv1Δv2Δv3]T表示式(9)中的聚合扰动:

不失一般性,假设上述不确定性扰动是有界的,即存在 Δv1max,Δv2max,Δv3max,使得 |Δv1|≤Δv1max,|Δv2|≤Δv2max,|Δv3|≤Δv3max成立。将控制量表达式(6)和聚合扰动式(10)代入式(9),可将考虑了参数不确定性以及扰动的再入飞行器反馈线性化系统表示为:

经过上述反馈线性化过程后,便可根据式(11)进行鲁棒控制器的设计了。
1.3 控制目标
本文主要考虑再入飞行器的姿态控制系统设计问题,目标为:在系统存在参数不确定性及外部扰动的情况下,通过控制舵面偏转角[δeδaδr]T,实现对制导环给出的姿态指令Ωc=[αcβcμc]T的有效跟踪。定义跟踪误差为:

2 控制器设计
2.1 指数时变滑模控制器设计
针对建立的再入飞行器的线性化模型式(11),本节给出一种基于指数时变滑模的全局鲁棒控制设计方法。首先,选择指数时变滑模面形式为:

式中,S(t)=[sα(t)sβ(t)sμ(t)]T∈R3为滑模面函数向量;滑模面斜率 Λ =diag[λ1,λ2,λ3]∈R3×3;a∈R+决定了时变滑模面向普通滑模面的趋近速度(这里,不失一般性,令λ1=λ2=λ3=a=λ);A∈R3为与系统状态初值相关的参数矩阵。
基于时变滑模理论,系统状态从初始时刻就要处于滑模面上,即满足:S(0)=03×1。计算可得:

设计时变滑模控制器形式为:

式中,veq为针对标称系统设计的等价控制,根据(t)=03×1计算可得;vsw= -ηsgn(S(t))是为了抵消系统中存在的不确定性而设计的切换控制。其中,sgn(S(t))=[sgn(sα)sgn(sβ)sgn(sμ)]T表示符号函数,η=diag[η1,η2,η3]∈R3×3为切换控制量增益,满足:

定理1:对于式(11)描述的再入飞行器非线性模型,采用式(13)所示的指数时变滑模面和相应的时变滑模控制律式(15),能够保证系统状态从初始时刻就始终处于滑模面上,即对于∀t∈[0,∞),S(t)≡0成立。
证明:
选择正定Lyapunov函数:

求其关于时间的导数,并代入式(11)、式(13)、式(15)和式(16),推导过程如下:

故可知,∀t∈[0,∞),V(t)≤V(0)=0 成立(时变滑模面式(13)使得系统轨迹从初始时刻就处于滑模面上,满足S(0)=0,故有V(0)=0成立);又由式(17)可知,V(t)≥0,故可推得V(t)≡0,这就意味着∀t∈[0,∞),S(t)≡0。证毕。
注1:定理1揭示了时变滑模优于普通滑模控制的特点,即完全消除了普通滑模的到达阶段,使得系统从初始时刻就处于滑模面上,有效地保证了系统的全局鲁棒性。

注2:抖振现象作为滑模变结构控制的固有特性,在实际应用时应给予特别注意。时变滑模控制由于初始时刻系统状态就处于滑模面上,所以抖振现象从初始时刻就存在。为了消除或者减弱抖振,这里,采用饱和函数sat(S(t))代替控制律式(15)中的符号函数,饱和函数的定义为:

式中,i=α,β,μ;φi为边界层厚度。通过选择合适的边界层厚度能够有效减弱抖振,但是,边界层取值过大会引入稳态误差。因此,边界层厚度选择需在系统控制精度与抑制抖振之间作折衷选择。
2.2 控制器参数选择
前面2.1节给出了时变滑模控制器的设计过程,但控制器参数λ还没有确定。本节通过引入误差二次型性能指标对参数λ的选择进行研究。
首先,选取误差二次型性能指标函数为:

式中,P,Q∈R3×3为对称的权值矩阵。为了分析方便,取P=diag[p,p,p],Q=I3×3。


3 仿真结果及分析
为了验证本文方法的有效性,以某再入飞行器为例,建立六自由度仿真模型如图1所示。

图1 再入飞行器时变滑模控制结构框图
仿真中,取初始高度为30 km,速度2 km/s,姿态角初始值为[0 0 0]T,姿态角给定指令[αcβc μc]T=[6 sin(t+π/2)0 20 sin(t+π/2)]T。
为了验证所设计控制律的鲁棒性,考虑+30%的大气密度拉偏,以及如下所示的高频外部扰动(直接施加于三轴的控制力矩上):d=[100 sin(t)100 sin(t)100 sin(t)]T。
为了比较所设计指数时变滑模控制的性能,与文献[4]中设计的普通滑模控制进行对比仿真实验。指数时变滑模控制器参数选择为:λ=4;切换增益选择为:η=diag[2,2,3];边界层厚度选择为φi=1/100;舵面偏转角限制为±30°。仿真结果如图2~图8所示。

图2 姿态角跟踪曲线
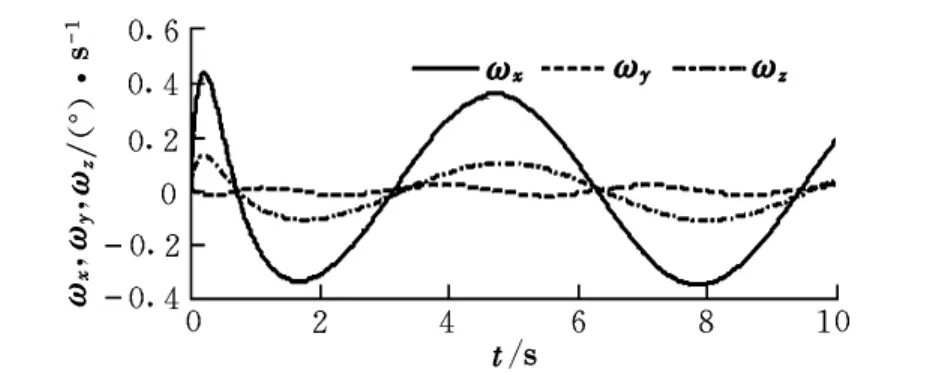
图3 姿态角速度曲线(时变滑模)

图4 姿态角速度曲线(普通滑模)
从图2的姿态角跟踪曲线可以看出,在+30%大气密度拉偏及高频扰动d同时存在的情况下,飞行器姿态角大约在1.5 s左右就能跟踪到给定姿态角指令。普通滑模由于在到达阶段非连续的切换控制起主要作用,姿态误差迅速收敛,姿态角响应速度比时变滑模更快,但相应的姿态角速度变化也会更剧烈(见图3、图4),在开始阶段的峰值明显高于采用时变滑模时的姿态角速度,这时比较容易引起控制量饱和。
图5、图6分别给出了采用时变滑模和普通滑模控制时的舵面偏转角曲线。从图中可以看出,采用时变滑模控制时的舵面偏转角曲线更平滑,而采用普通滑模控制时有明显的跳变现象,引起舵偏变化不连续(如图6中虚线框中所示)。

图5 舵面偏转角曲线(时变滑模)

图6 舵面偏转角曲线(普通滑模)
图7、图8给出了滑模面响应曲线。从图中可以看出,时变滑模控制有效消除了采用普通滑模控制的到达段,从初始时刻系统状态就处于边界层内(φi=1/100),保证了全局鲁棒性;而采用普通滑模控制时存在明显的到达阶段,在到达段不能保证系统的鲁棒性能。
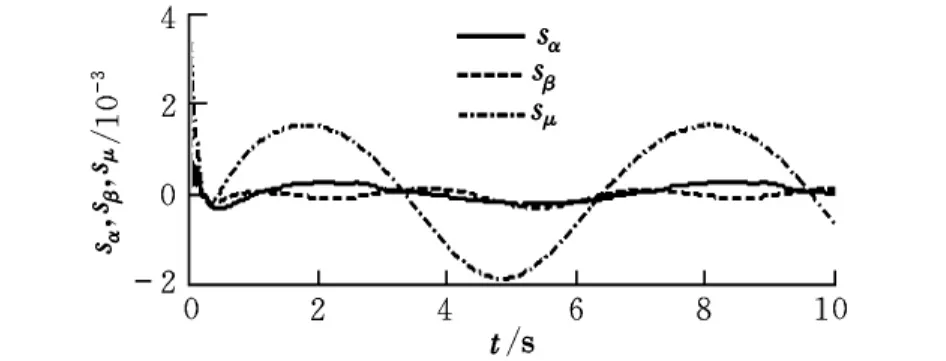
图7 滑模面响应曲线(时变滑模)
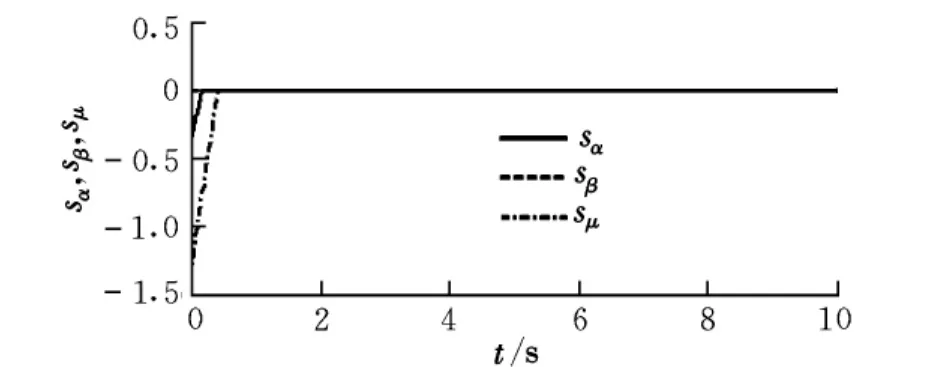
图8 滑模面响应曲线(普通滑模)
4 结束语
本文以某再入飞行器为例,考虑再入过程中可能遇到的外部扰动及参数不确定性,在其不确定模型反馈线性化解耦的基础上,设计了一种具有全局鲁棒的指数时变滑模控制器。仿真结果表明,所设计的指数时变滑模姿态控制律有效地消除了普通滑模控制存在的到达段,使得系统轨迹从初始时刻就处于滑模面上,保证了系统对匹配参数不确定性和外部扰动的全局鲁棒性。为了验证所提出的控制器的鲁棒性,考虑了+30%的大气密度拉偏和高频外部扰动情况,这些不确定因素的选择可能具有一定的局限性,今后应进一步研究如何合理选取不确定性,以更加符合工程实际的需求。
[1]Shtessel Y,McDuffie J.Sliding mode control of the X-33 vehicle in launch and re-entry modes[R].AIAA-98-37139,1998.
[2]Utkin V I.Sliding modes in control and optimization[M].Berlin:Springer-Verlag,1992:111-130.
[3]Shtessel Y,Hall C,Jackson M.Reusable launch vehicle control in multiple-time-scale sliding modes[J].Journal of Guidance,Control,and Dynamics,2000,23(6):1013-1020.
[4]韩艳铧,周凤岐,周军.基于反馈线性化和变结构控制的飞行器姿态控制系统设计[J].宇航学报,2004,25(6):637-641.
[5]Bartoszewicz A.Time-varying sliding modes for second-order systems[J].IEE Proceedings of Control Theory Application,1996,143(5):455-462.
[6]Jin Y Q,Liu X D,Qiu W.Time-varying sliding mode control in rigid spacecraft attitude tracking[J].Chinese Journal of Aeronautics,2008,21(4):352-360.
[7]Recasens J J,Chu Q P,Mulder J A.Robust model predictive control of a feedback linearized system for a liftingbody re-entry vehicle[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit.San Francisco,California,2005.
[8]John D S.Hypersonic vehicle simulation model:wingedcone configuration[R].NASA Technical Memorandum 102610,1990.
[9]Slotine J J,Li W P.Applied nonlinear control[M].New Jersey:Prentice Hall,1991.
[10]许志,唐硕.RLV再入返回喷流控制策略研究[J].飞行力学,2009,27(6):44-47.
猜你喜欢
中等数学(2020年2期)2020-08-24 07:58:46
农业机械学报(2020年2期)2020-03-09 07:35:30
中华建设(2019年7期)2019-08-27 00:50:18
测控技术(2018年9期)2018-11-25 07:44:24
智富时代(2017年4期)2017-04-27 17:08:47
北京航空航天大学学报(2016年7期)2016-11-16 01:50:55
光学精密工程(2016年3期)2016-11-07 09:03:32
项目管理技术(2016年12期)2016-06-15 20:29:33
广东石油化工学院学报(2016年6期)2016-05-17 05:17:43
西南交通大学学报(2016年6期)2016-05-04 04:13:11