基于Matlab /FightGear 的战斗机自动攻击模拟仿真
2012-11-07 02:19:02左星星张斌梅桂芳李浩亮
飞行力学 2012年6期
左星星, 张斌, 梅桂芳, 李浩亮
(1.空军工程大学 工程学院, 陕西 西安 710038;2.西安交通大学 电气工程学院, 陕西 西安 710049)
基于Matlab /FightGear 的战斗机自动攻击模拟仿真
左星星1, 张斌1, 梅桂芳2, 李浩亮1
(1.空军工程大学 工程学院, 陕西 西安 710038;2.西安交通大学 电气工程学院, 陕西 西安 710049)
实现战斗机自动攻击能极大地减轻飞行员的负担,是未来空战的发展方向。首先分析了飞机模型和瞄准误差基本理论;然后利用Simulink工具箱建立六自由度飞机模型,通过瞄准误差解算出控制信息实现飞机自动控制,并结合可编程飞行平台FlightGear模拟仿真战斗机自动攻击过程,将攻击过程中瞄准误差作为攻击效果评价的指标;最后给出仿真结果,表明战斗机顺利实现了自动攻击。
自动攻击; 瞄准误差; 六自由度
引言
空战的目的是击落或驱逐对手,同时保证自身的安全[1-2]。近距空战时敌我双方斗智斗勇,空战过程异常激烈,这给飞行员造成巨大压力,甚至导致空战失败[3-4]。实现战斗机自动攻击能够很大程度减轻飞行员压力,赢得更多获胜的机会。
基于此,本文设计实现了战斗机的自动攻击。通过攻击时我机瞄准误差的变化解算出飞机应飞控制信息,实现对飞机的自动控制,结合Simulink工具箱和FlightGear飞行平台设计战斗机模型并模拟仿真战斗机的攻击过程。
1 基本理论
瞄准误差是飞行员通过瞄准标志瞄准目标时瞄准线与目标线之间的夹角[5]。近距空战中,瞄准误差是判断战斗机是否满足攻击条件的重要指标。本文采用战斗机瞄准误差趋于零或在某一允许范围内作为攻击指标,根据瞄准误差的实时变化情况来操控飞机进行机动,从而实现战斗机自动攻击。
1.1 水平面瞄准误差
水平面瞄准误差如图1所示。图中,VPτ为战斗机在水平面内所需的速度矢量;θPτ为水平面内战斗机所需速度矢量的前置角;Vdτ和td分别为导弹水平面飞行的分速度和击中目标所需的飞行时间;tH为战斗机和目标的飞行时间。

图1 水平面瞄准误差
将战斗机、目标和导弹的运动轨迹投影到瞄准线及其法线方向,可得:
Rτ=VτtHcosθPτ+VdτtdcosθPτ-
VTτtHcosθTτ
(1)
VTτtHsinθTτ=VτtHsinθPτ+VdτtdsinθPτ
(2)
可得水平面内引导瞄准误差为:
Δτ=K(θτ-θPτ)
(3)
1.2 垂直面瞄准误差
垂直面瞄准误差如图2所示。图中,VPβ为战斗机在垂直平面所需速度矢量;θPβ为垂直面内战斗机所需速度矢量的前置角;Vdβ和td分别为导弹垂直面飞行的分速度和击中目标所需的飞行时间。

图2 垂直面瞄准误差
将战斗机、目标和导弹的运动轨迹投影到垂直面瞄准线及其法线方向,可得:
Rβ=VβtHcosθPβ+VdβtdcosθPβ-
VTβtHcosθTβ
(4)
VTβtHsinθTβ=VβtHsinθPβ+VdβtdsinθPβ
(5)
可得垂直面内引导瞄准误差为:
Δβ=K(θβ-θPβ)
(6)
2 仿真流程设计
2.1 原理分析
本文是基于瞄准误差模拟战斗机自动攻击过程。首先,假设我机在截获敌机条件下,通过机载设备获取敌机的方位、坐标、运动参数等信息,我机根据敌机信息作出相应的机动跟踪目标;我机将本机和敌机信息同时送给火控计算机进行火控解算;然后提取与瞄准误差相关信息送给瞄准误差计算模块进行误差解算;最后将得到的误差信息转换为相应的战机操控信息,如油门量、俯仰量、偏航量等通过平显显示,并送到我机飞控系统进行自动控制飞行,直到消除瞄准误差实现自动攻击。攻击示意图如图3所示。

图3 自动攻击示意图
2.2 仿真总体设计
选取Matlab中Simulink工具箱和FlightGear飞行软件进行仿真设计。FlightGear是一款多平台飞行模拟器,其代码开源,开发者可以根据自己的需求编写不同飞机模型[6-7]。本文仿真需要用三台计算机完成(一台模拟敌机,一台模拟我机,一台用作FlightGear显示),如图4所示。

图4 仿真示意图
2.2.1战斗机模型设计
根据分析,本文基于文献[8]中的F-16模型设计六自由度飞机模型,依据六自由度飞机模型力学、运动学等规律,利用Simulink中提供的可供用户自主编程设计的S-function模块来设计所需要的敌我机模型。
2.2.2瞄准误差模块
为了方便控制信息的解算,将瞄准误差分解为俯仰瞄准误差和方位瞄准误差,即水平、垂直面瞄准误差,见式(3)和式(6)。同理用S-function模块进行编程,设计出误差和控制信息解算模块,如图5所示。

图5 瞄准误差计算模块
2.2.3网络模块
由于仿真过程中敌机和我机模型输入输出的信息比较多,也不可能单独传输每个信息,因此,为了实现仿真全部信息在局域网中的传输,首先选用Simulink中packet模块将信息压缩打包然后用网络发送模块UDP Send按照UDP协议进行信息传输,实现敌机、我机、实景显示三者的实时仿真。
2.3 仿真实现
根据原理将设计的模块连接成如图6所示的自动攻击Simulink框图。开始仿真,设定敌机和我机初始运动条件,将敌机信息压缩打包通过网络发到我机平台;我机平台提取可用信息汇总我机自身信息送到平台下瞄准误差计算模块;该模块将误差信息送给控制信息解算模块解算出我机自动攻击的控制信息,并将控制信息反馈给我机飞控系统进行自动控制,直到消除瞄准误差完成攻击。同时将敌机和我机信息通过网络发送到FlightGear显示平台进行实景显示。
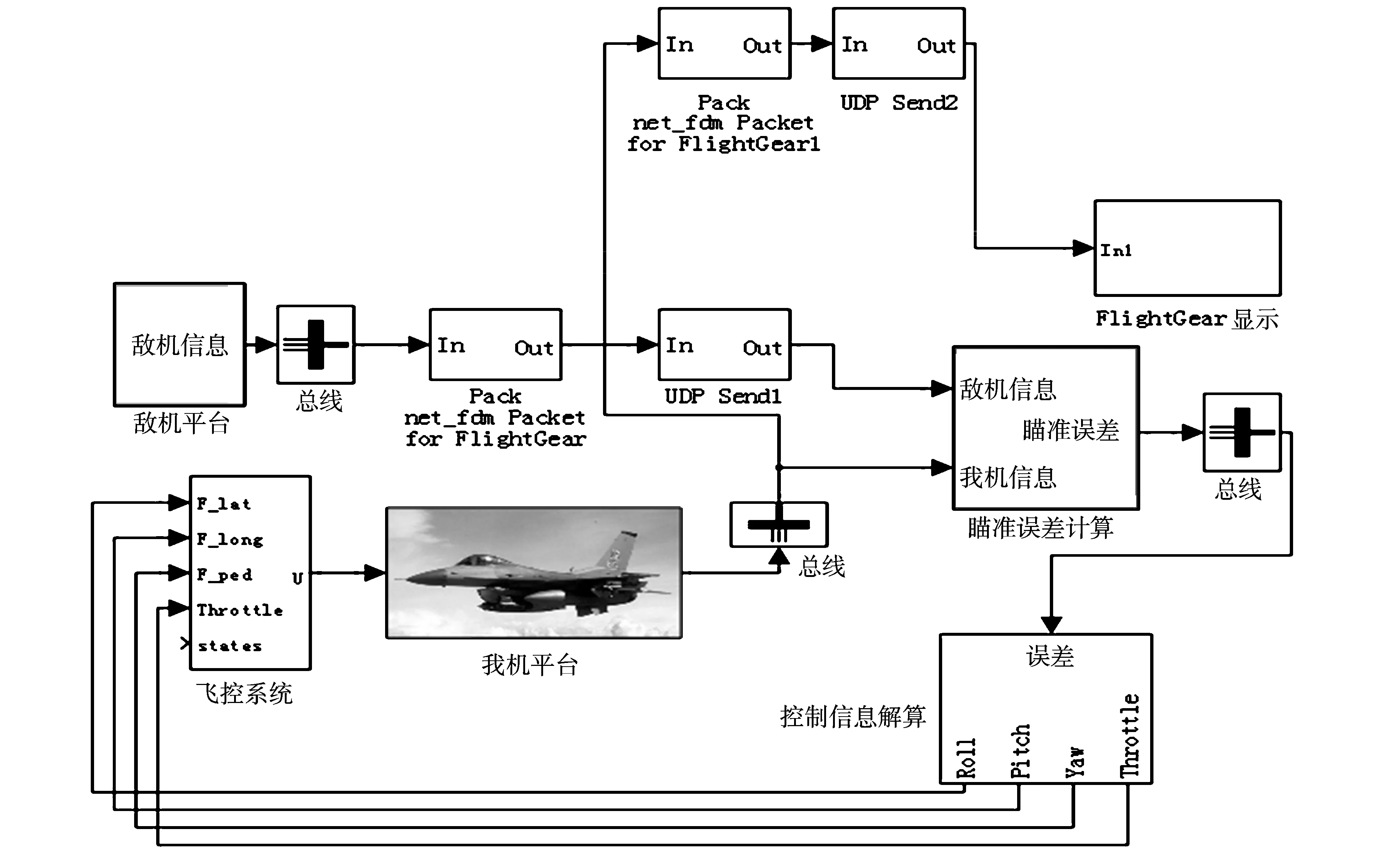
图6 Simulink仿真框图
3 仿真结果
假设敌机作直线运动,设定敌机初始位置条件为:xm=1 000 m,ym=1 200 m,zm=5 000 m;初速度:Vm=160 m/s;侧滑角、迎角分别为:βm=0,αm=(5π)/180;升降舵偏角:δem=π/180,方向舵偏角:δrm=(2π)/180,副翼偏角δam=π/180;油门:Tm=0.1485,敌机作直线运动,三个方向转动角速度为零。
我机初始位置条件为:xw=-1 000 m,yw=200 m,zw=3 000 m;初速度:Vw=164 m/s;侧滑角、迎角分别为:βw=0,αw=(10π)/180;升降舵偏角:δew=(2π)/180,方向舵偏角:δrw=(5π)/180,副翼偏角:δaw=π/180;油门:Tw=0.2,转动角速度:pw=1 (°)/s,qw=-1 (°)/s,rw=1 (°)/s,仿真时间50 s。仿真过程如图7~图10所示。
由图8可知,我机自动攻击时,在开始10 s内跟踪敌机,作较大机动,因此迎角、侧滑角变化剧烈;10 s后我机锁定敌机时,二者趋于稳定,我机稳定飞行直到攻击完成。

图7 敌我机运动轨迹

图8 我机攻击时迎角和侧滑角变化曲线

图9 我机瞄准误差变化曲线
由图9可知,自动攻击过程中我机瞄准误差在不断减小,开始阶段我机的瞄准误差变化较大,此时飞控系统根据解算的控制信息自动调整飞机跟踪敌机使瞄准误差逐渐减小直到为零,成功消除瞄准误差最后完成攻击,仿真达到预期效果。

图10 我机过载变化曲线
从图10可以看出,我机切向过载、法向过载都趋于稳定,在前10 s为了追踪敌机进行机动,此时两个方向上过载有较大变化(完成速度变化和转弯过程),最后成功锁定敌机,切向过载减小为零,法向过载减小到稳定状态。
4 结束语
本文基于瞄准误差理论对战斗机自动攻击过程进行模拟仿真,将攻击过程中瞄准误差作为重要指标来评价自动攻击效果。仿真采用Matlab的Simulink工具箱与FlightGear可编程飞行平台相结合,利用Simulink进行飞行数据计算仿真,并通过FlightGear实时实景显示攻击过程。仿真结果表明,攻击过程中瞄准误差显著减小到零,顺利完成自动攻击。本文的研究对将来实现战斗机自动攻击有一定的实用价值。
[1] 姚佩阳,薛艺莉,王冬旭.迎头抢攻飞行轨迹数学建模及评估[J].空军工程大学学报(自然科学版),2010,11(2):6-10.
[2] 蓝伟华.空对空多目标攻击系统技术[J].电光与控制,2006,13(3):15-18.
[3] 杜永伟.基于瞄准误差的战斗机自动攻击引导方法研究[D].西安:空军工程大学,2010.
[4] 梁鸿飞,范广才,董彦非.空战战法训练系统目标机飞行轨迹实现[J].计算机仿真,2005,22(12):32-34.
[5] 周志刚.航空综合火力控制原理[M].北京:国防工业出版社,2008.
[6] 黄华,徐幼平,邓志武.基于FlightGear模拟器的实时可视化飞行仿真系统[J].系统仿真学报,2007,19(19):4421-4423.
[7] 王立波,张复春,高文琦,等.基于FlightGear飞行仿真软件数据的采集与处理[J].电子设计工程,2011,19(24):53-57.
[8] Brian L S,Frank L L.Aircraft control and simulation [M].United States:Jhon Wiley & Sons,2004.
(编辑:崔立峰)
SimulationoffighterplaneautomaticattackbasedonMatlab/FlightGear
ZUO Xing-xing1, ZHANG Bin1, MEI Gui-fang2, LI Hao-liang1
(1.Engineering Institute, Air Force Engineering University, Xi’an 710038, China;2.Electrical Engineering College, Xi’an Jiao Tong University, Xi’an 710049, China)
Automatic attack can reduce pressure of pilot is the important part of the direction of air war. First analyzing the fighter plane model and the basic theory of sight error, building 6-DOF fighter plane model, computing the message of control by sight error to achieve auto control, combining the FlightGear to simulate fighter plane automatic attack, taking sight error as the target of attacking effect. The result showed fighter plane finish automatic attack.
automatic attack; sight error; 6-DOF
V211.8
A
1002-0853(2012)06-0565-04
2012-03-21;
2012-08-05; < class="emphasis_bold">网络出版时间
时间:2012-11-23 14∶01
航空科学基金资助(20095196012)
左星星(1989-),男,江苏涟水人,硕士研究生,研究方向为航空火力指挥与电子综合。
猜你喜欢
小哥白尼(军事科学)(2022年1期)2022-04-26 14:02:40
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18 05:13:54
中国军转民(2017年11期)2018-01-31 02:17:42
军营文化天地(2017年6期)2017-06-28 11:30:09
中学数学杂志(高中版)(2016年6期)2017-03-01 18:51:01
中学生数理化·高一版(2016年2期)2016-05-30 10:48:04
百科探秘·航空航天(2015年10期)2015-11-07 07:05:14
新高考·高一物理(2014年1期)2014-09-18 15:33:33
制造业自动化(2011年13期)2011-01-29 06:25:42
小哥白尼·军事科学画报(2009年6期)2009-02-03 07:51:42