
伽利略导航卫星E1 B伪码跟踪技术研究
2012-07-25 03:21王千喜杨晓昆翟羽佳李秋凤
微处理机 2012年2期
王千喜,刘 岩,杨晓昆,翟羽佳,李秋凤,胡 强
(中国航天科工信息技术研究院,北京100070)
1 引言
伽利略(Galileo)是欧洲的全球导航系统,为民用用户提供高精度有保证的全球定位服务。它可与当前正在运营的两个全球卫星导航系统GPS和GLONASS一起应用于导航定位。全部部署完的伽利略系统包括30颗卫星(27颗在轨运行,3颗备用),它们分别位于三个圆形的中地球轨道平面上,平面的平均轨道半长轴为29601.297公里。参考赤道平面的轨道平面倾角为56度。
伽利略卫星发送3种不同的CDMA信号,即E5、E6和E1,它们的载波频率分别是1191.795MHz、1278.750MHz和1575.420MHz。E1信号的特性、BOC算法中的无模糊跟踪鉴别器算法的参数推导仿真和利用此算法参数设计的伽利略接收机将在接下来的章节中被着重介绍。
2 伽利略E1信号
E1信号由E1-B和E1-C信号组成。如图1所示。图1中S1表示E1-B码子载波a和E1-B码子载波b分别乘以系数然后相加,S2表示E1-C码子载波a和E1-C码子载波b分别乘以系数然后相减。
伽利略在E1频点上采用BOC调制方式。BOC调制方式使Galileo的信号与GPS的L1 BPSK信号避免了相互干扰,同时有着良好的抗多径特性。
BOC信号的相关函数具有多个峰值,且只有中心最大峰才与相关对应。边峰幅值与中心幅值较接近,导致信号捕获中的模糊性,并且跟踪环路可能锁住边峰并产生跟踪错误。由于BOC信号多边峰特性,其跟踪方案与传统扩频信号有所不同。
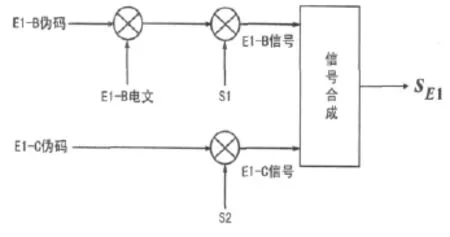
图1 E1信号调制图
BOC(1,1)信号的自相关函数如下[1]:

自相关函数,如图2所示。

图2 BOC(1,1)信号的自相关函数图
对于一般信号而言,码跟踪环通常使用超前滞后环,经典超前滞后环的误差鉴别公式为:

n取1或2,D为超前支路和滞后支路之间的时间间隔。
由于通过上式计算所得的结果对信号幅度很敏感,所以也可以考虑使用归一化计算公式:

归一化鉴别器和非归一化鉴别器图如图3和图4所示。

图3 BOC(1,1)信号的传统超前减滞后归一化鉴别器图

图4 BOC(1,1)信号的传统超前减滞后没有归一化鉴别器图
从图3和图4中可以看出,BOC(1,1)信号的传统超前减滞后鉴别器不管是归一化还是非归一化都存在误锁点。
3 BOC的算法介绍和选用的算法参数仿真
3.1 关于BOC的算法介绍
目前关于BOC的算法很多,通过仿真分析得出表1。
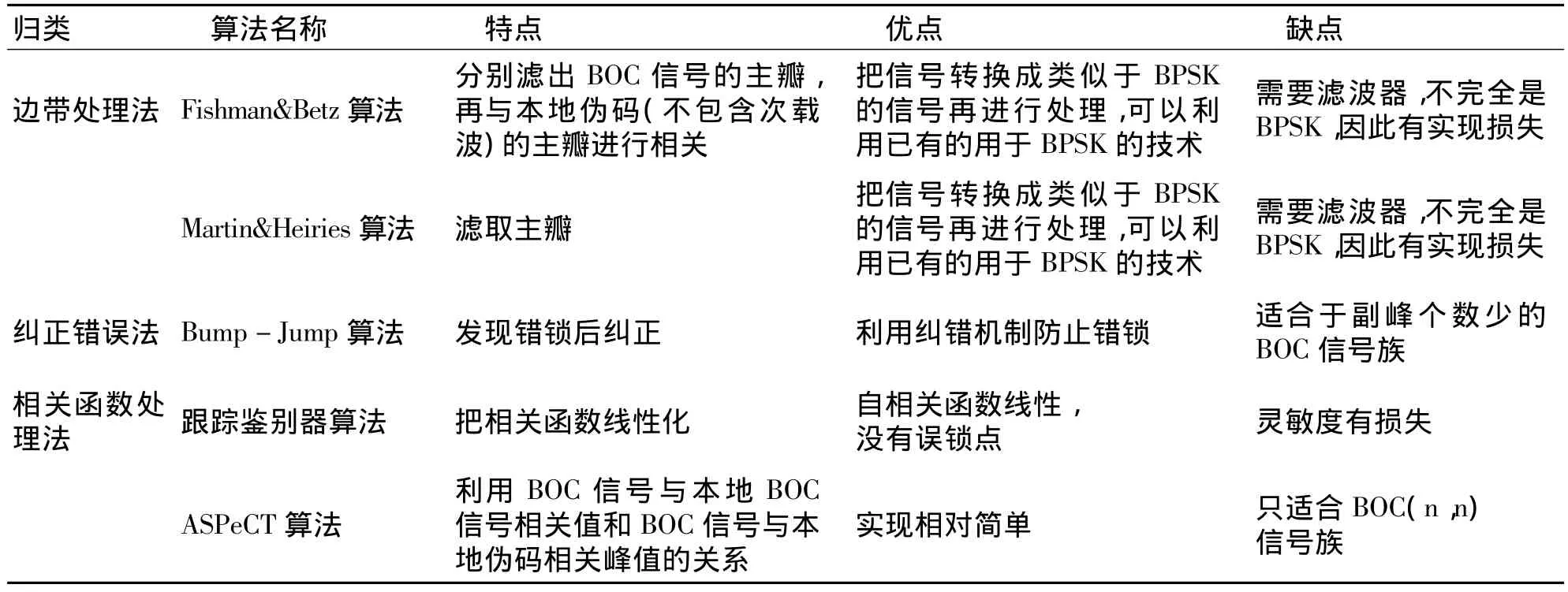
表1 BOC算法
根据具体项目情况,选取相关函数处理方法中 的跟踪鉴别器算法[2],此算法为Fante提出的自相关函数线性化算法。
3.2 选用的算法参数仿真
把公式(1)做进一步改进,得到:

把公式(3)做进一步改进,得到:

如果能够找到合适的系数a(m)使得误差函数具有线性变化的形式:En(τ)=ατ或者 Sn(τ)=ατ,-T1<τ<T1,α为常数,2T1为相关函数最左与最右两个峰之间的距离。把En(τ)作为例子,用最小化En(τ)和ατ之间的均方误差的方法来计算a(m)。

计算a(m)使得下面等式成立:

定义如下向量:

为了使均方误差δ最小化,那么系数向量a要满足如下条件:

其中,

这样可以对任意选择的n,N和D都可以计算误差函数En(τ),因此可以推导出合适的参数。
但对于在公式(4)中定义的Sn鉴别器来说,没有简单的方法来计算系数a(m),因此选用下面的计算式来计算a(m)。
如果当m=1 to N时,a(m)=1+β(m-N)/N,
或者当m=N+1 to 2N时,

其中β是一个任意常数,a(m)的值是对称的。
计算出N=4,码间距为0.25的一组参数,仿真图如图5和图6所示。

图5 BOC(1,1)信号的超前减滞后鉴别器图
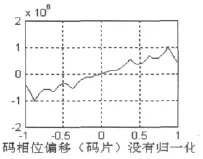
图6 BOC(1,1)信号的超前减滞后鉴别器图
这组参数的归一化鉴别器输出在码片误差在-1到1之间没有误锁点,在码片误差在-0.35到0.35之间近似为线性变化,在码片误差在-0.1到0.1之间为线性变化。
4 接收机设计
利用此算法参数,一款伽利略接收机被设计完成,硬件器件主要包括射频、FPGA和DSP。射频实现下变频;在FPGA中主要实现相关器设计;在DSP中实现环路滤波器设计、伽利略信号电文的解码、伪距的产生和PVT解算。其中为实现本方法,参数在FPGA中的一个通路中实现18个相关器,其中16个用来合成8路延迟门鉴相器,另外2个用于反正切鉴相器。如图7所示。

图7 BOC(1,1)信号跟踪模块结构图
输入信号为经过AD采样量化后的信号,它被分成两路,一路和本地载波发生器生成的同相载波相乘,另一路和本地载波发生器生成的正交载波相乘;相乘后它们又分别与本地BOC码和本地码发生器产生的9路延迟码相乘,并且累加一个完整的本地码周期(4 毫秒),结果保存在 Q1,Q2,Q3,Q4,Q5,Q6,Q7,Q8,Q9,I1,I2,I3,I4,I5,I6,I7,I8,I9 中。其中的 Q1,Q2,Q3,Q4,Q6,Q7,Q8,Q9,I1,I2,I3,I4,I6,I7,I8和I9送入到合成的8路延迟门鉴相器中,合成的8路延迟门鉴相器输出鉴相结果到码环跟踪滤波器中,码环跟踪滤波器输出的结果反馈到本地BOC码和本地码发生器来控制本地BOC码和本地码的产生,实现码的跟踪。其中的Q5和I5送入到反正切鉴相器中,反正切鉴相器输出的值送入到载波跟踪环滤波器,然后滤波器输出结果反馈到本地载波发生器来控制本地载波的产生,从而实现载波的跟踪。
为了测试接收机的性能,采用 SPIRENT STR8000信号源来测试。由于伽利略卫星E1频点信号最小到达地面功率为-127dBm(仰角大于10度),为了更好地验证接收机性能,把 SPIRENT STR8000输出信号功率设置为-128dBm,比实际伽利略卫星E1频点信号最小到达地面功率低。定位精度如图8所示。从图中可以看出大多数定位点在平面4米以内,该跟踪方法参数可行。

图8 伽利略E1 B定位精度图
5 结束语
利用一个多路相关器设计和合成的8路延迟门鉴别器结合应用可以有效地去除跟踪时由于BOC调制造成的边峰影响,利用此方法参数设计的接收机具有很好的性能。
[1] Julien O,C Macabiau,G Lachapelle,et al.A New UnambiguousBOC(n,n)Signal Tracking Technique[C].CDROM Proceedings of the European Navigation Conference GNSS 2004,(Rotterdam,The Netherlands,16-19 May),Session‘Signal’,12 pages.
[2] Fante R L.Unambiguous Tracker for GPS Binary-Offset-Carrier Signals[C].Proceedings of the 59th Annual meeting of the Institute of navigation and CIGTF 22nd Guidance Test Symposium,Albuquerque,NM,2003(6):141-145.
猜你喜欢
通信学报(2022年10期)2023-01-09
成都信息工程大学学报(2022年4期)2022-11-18
国防科技大学学报(2019年4期)2019-07-29
中学生数理化·八年级物理人教版(2019年3期)2019-04-25
新教育(2018年27期)2018-02-22
无线电工程(2017年10期)2017-09-28
中国科技纵横(2017年2期)2017-03-24
系统工程与电子技术(2016年5期)2016-11-02
西部广播电视(2015年6期)2015-02-27
全球定位系统(2010年5期)2010-08-29
