矩阵方程AXB+CYD=E的Toeplitz矩阵解
2012-07-13 07:19:20孙庆娟郭文彬王柄中
河南科技大学学报(自然科学版) 2012年3期
孙庆娟,郭文彬,王柄中
(聊城大学数学科学学院,山东聊城252059)
0 前言
矩阵方程是数值代数的重要研究领域。关于矩阵方程

的研究取得了不少进展。例如,1987年,文献[1]利用广义奇异值分解(GSVD)给出了矩阵方程(1)的极小范数解;1998年,文献[2]利用标准相关分解(CCD)研究了该矩阵方程的最小二乘解;2006年,文献[3]利用广义奇异值分解(GSVD)和标准相关分解(CCD)研究了该矩阵方程的极小范数最小二乘解;2007年,文献[4]利用Moore-Penrose广义逆给出了该矩阵方程的对称极小范数最小二乘解;2008年,文献[5]利用矩阵的Kronecker积与广义逆讨论了该矩阵方程的矩阵极小范数对称解,并给出了解存在的充分必要条件及解的表达式;2010年,文献[6]利用构造迭代算法讨论了该矩阵方程的对称最小范数最小二乘解。
然而,文献[1-8]中的方法用于解决矩阵方程(1)的Toeplitz矩阵解有一定的困难。因此,本文将利用Kronecker积、矩阵的拉直算子、Moore-Penrose广义逆来研究矩阵方程(1)的Toeplitz矩阵解和对称Toeplitz矩阵解的表达式,及其最小二乘解的一般形式。
1 基本定义
本文用ℝm×n表示全体m×n阶实矩阵的集合,In表示n阶单位矩阵集合。对于任意矩阵A,B∈ℝm×n,定义A与B的内积〈A,B〉=tr(BTA),则由此内积所诱导出的范数是矩阵A的Frobenius范数。
定义 1[9]对于 n 阶方阵 X=(xij)∈ ℝn×n,存在一组数 x-(n-1),x-(n-2),…,x-1,x0,x1,…,xn-2,xn-1使得X的元素满足xij=xj-i(i,j=1,2,…,n),则称X为Toeplitz矩阵,记作T(x-(n-1),x-(n-2),…,x-1,x0,x1,…,xn-2,xn-1)。全体 n 阶 Toeplitz矩阵的集合记作 Tℝn×n。
定义 2 对于 n 阶方阵 X=(xij)∈ ℝn×n,存在一组数 x0,x1,…,xn-2,xn-1使得 X 的元素满足

则称 X 为对称 Toeplitz矩阵,记作 ST(x0,x1,…,xn-2,xn-1)。全体 n 阶对称 Toeplitz矩阵的集合记作 STℝn×n。
定义 3[9]设 A ∈ ℝm×n,B ∈ ℝp×q,称 A ⊗ B=(aijB)∈ ℝmp×nq为 A 与 B 的 Kronecker积。
定义 4 设 A=(aij)∈ ℝm×n,记 ai=(a1i,a2i,a3i,…,ami)(i=1,2,3,…,n),令


定义 6 当矩阵 X=ST(x0,x1,…,xn-2,xn-1)为 n 阶对称 Toeplitz矩阵时,令

2 矩阵方程AXB+CYD=E的Toeplitz矩阵解
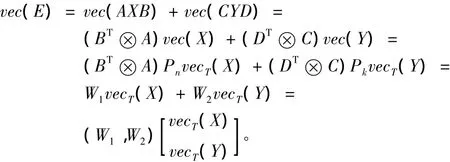
引理 1[9]对于任意的矩阵 A ∈ ℝm×n,B ∈ ℝn×s,C ∈ ℝs×t,总有 vec(ABC)=(CT⊗ A)vec(B)。
引理2 对X∈ℝn×n,则X∈Tℝn×n⇔vec(X)=PnvecT(X),其中vecT(X)∈ℝ2n-1由式(3)给出,
其中ei为n阶单位矩阵In的第i列。
证明 如果X∈Tℝn×n,则由Toeplitz矩阵的定义可得
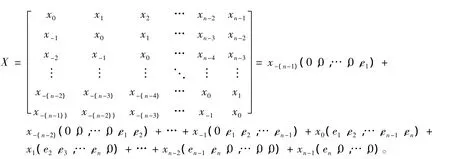
将等式两边拉直有
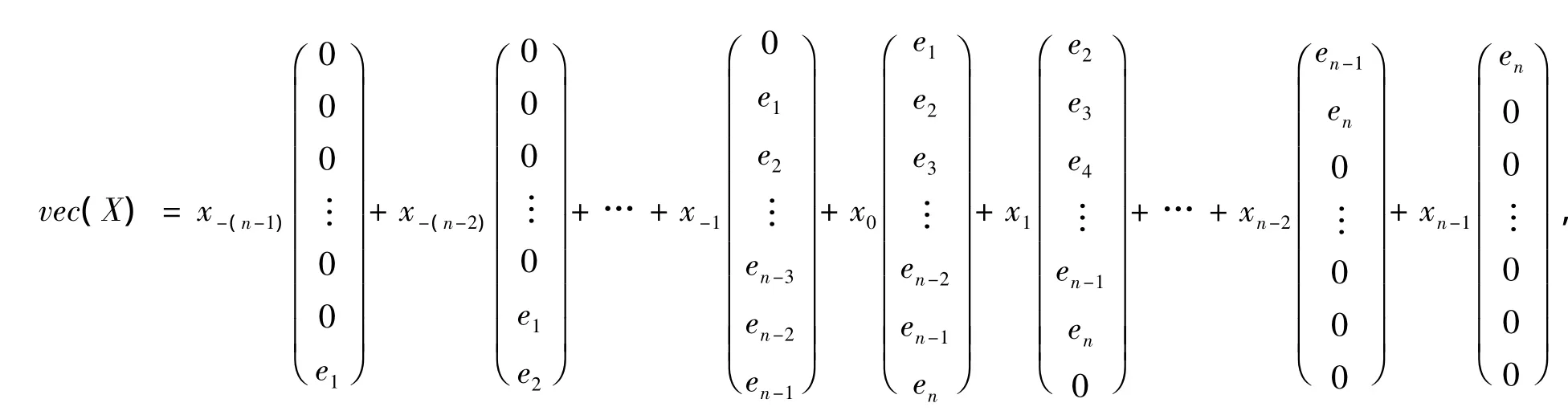
进一步可得

反过来,若 X ∈ ℝn×n且 vec(X)=PnvecT(X),则可得 X ∈ Tℝn×n。证毕。
引理3[9]设A∈ℝm×n,b∈ℝn,则线性方程组Ax=b有解的充分必要条件为AA+b=b,这时Ax=b的通解是x=A+b+(I-A+A)y,其中y∈ℝn是任意的。
引理4[9]设A∈ℝm×n,b∈ℝn,则不相容线性方程组Ax=b的最小二乘解为x=A+b+(I-A+A)y,其中y∈ℝn是任意的。
下面给出矩阵方程AXB+CYD=E的Toeplitz矩阵解。
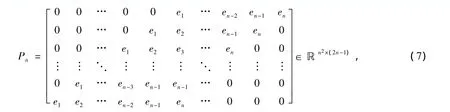
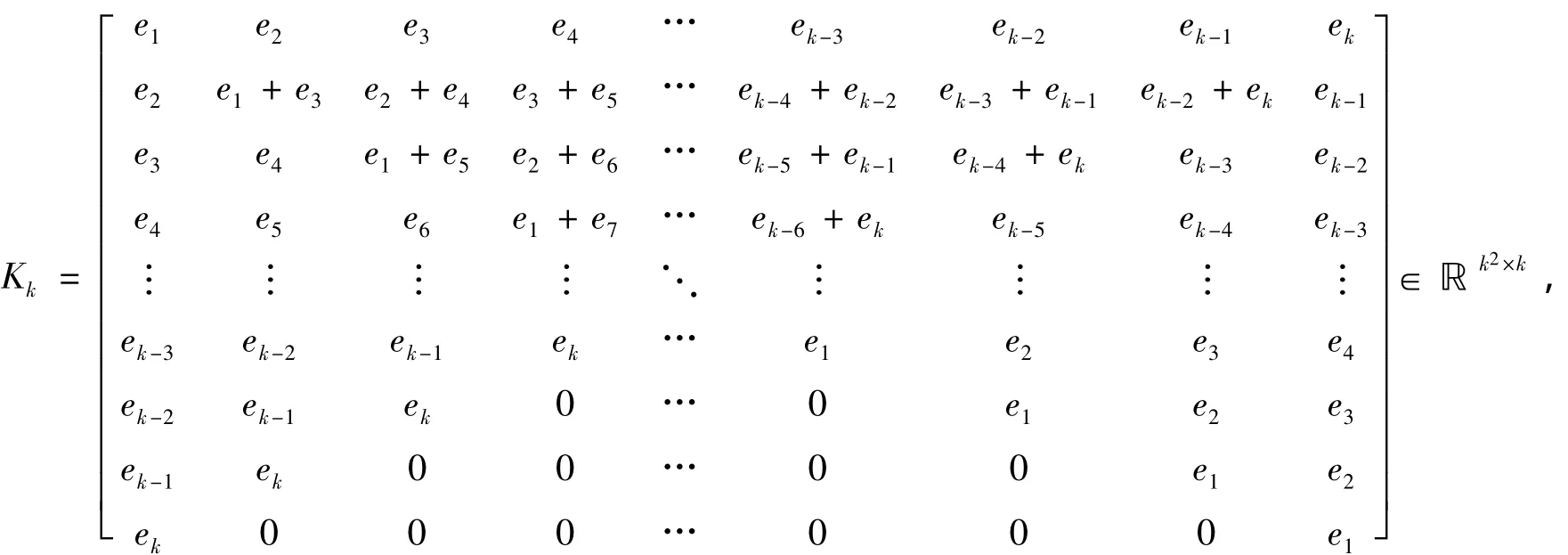
定理 1 对给定的 A ∈ ℝm×n,B ∈ ℝn×s,C ∈ ℝm×k,D ∈ ℝk×s,E ∈ ℝm×s,Pn如式(7)所示,

其中,ei为k阶单位矩阵Ik的第i列。vec(X)如式(2)所定义,令W1=(BT⊗A)Pn,W2=(DT⊗C)Pk,则当(W1,W2)+(W1,W2)vec(E)=vec(E)时,矩阵方程(1)的Toeplitz矩阵解可表示为

其中y为适当维数的任意向量。
证明 设X、Y分别为矩阵方程(1)的Toeplitz矩阵解,则由引理2知
由引理3 知,AXB+CYD=E 有 Toeplitz解当且仅当(W1,W2)+(W1,W2)vec(E)=vec(E),通解为

其中y为适当维数的任意向量。

其中y为适当维数的任意向量。证毕。
定理 2 对给定的 A ∈ ℝm×n,B ∈ ℝn×s,C ∈ ℝm×k,D ∈ ℝk×s,E ∈ ℝm×s,Pn如式(7)所示,

其中,ei为k阶单位矩阵Ik的第i列。vec(X)如式(2)所定义,令W1=(BT⊗A)Pn,W2=(DT⊗C)Pk,则当矩阵方程(1)不相容时,满足 AXB+CYD-E=min的最小二乘解的一般形式为

其中y为适当维数的任意向量。
证明 证明与定理1的证明类似,这里省略。
3 矩阵方程AXB+CYD=E的对称Toeplitz矩阵解
引理5 对X∈ℝn×n,则X∈STℝn×n⇔vec(X)=KnvecST(X),其中vecST(X)∈ℝn由式(5)给出,

其中ei为n阶单位矩阵In的第i列。
证明 证明与引理2的证明类似,这里省略。
定理 3 对给定的 A ∈ ℝm×n,B ∈ ℝn×s,C ∈ ℝm×k,D ∈ ℝk×s,E ∈ ℝm×s,Kn如式(8)所示,
其中,ei为k阶单位矩阵Ik的第i列。vec(X)如式(2)所定义,令U1=(BT⊗A)Kn,U2=(DT⊗C)Kk,则当(U1,U2)+(U1,U2)vec(E)=vec(E)时,矩阵方程(1)的对称Toeplitz矩阵解可表示为

其中y为适当维数的任意向量。
定理 4 对给定的 A ∈ ℝm×n,B ∈ ℝn×s,C ∈ ℝm×k,D ∈ ℝk×s,E ∈ ℝm×s,Kn如式(8)所示,
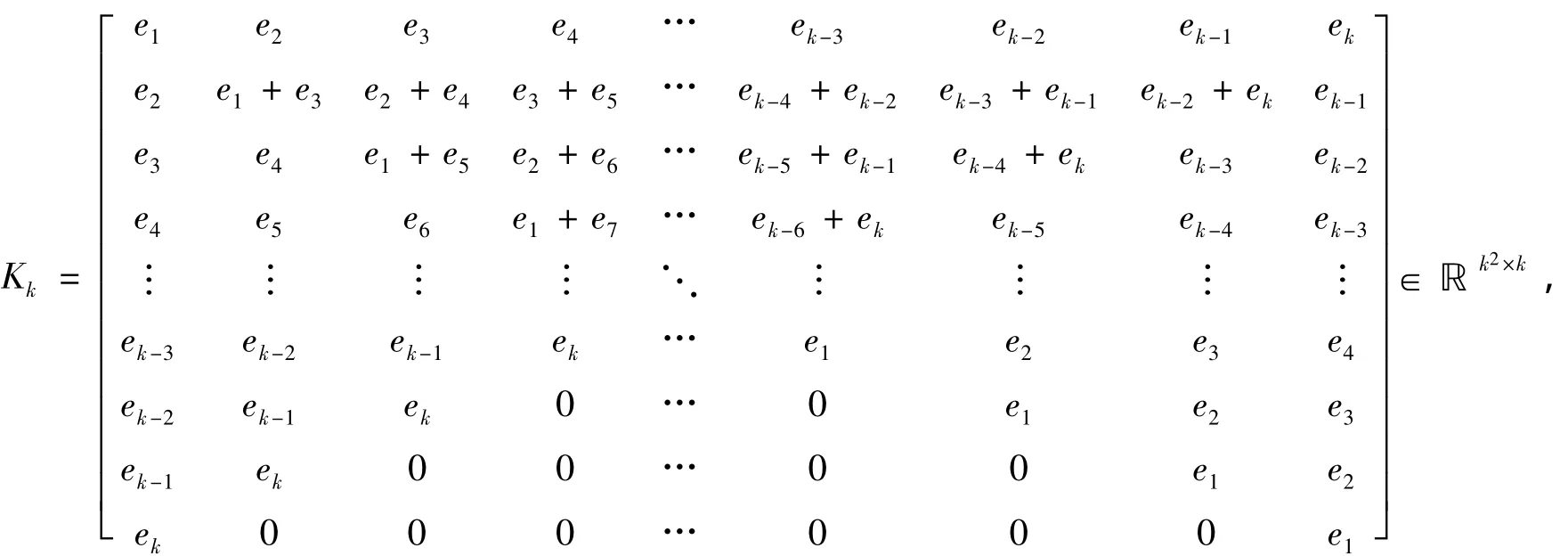
其中,ei为k阶单位矩阵Ik的第i列。vec(X)如式(1)所定义,令U1=(BT⊗A)Kn,U2=(DT⊗C)Kk,则当矩阵方程(1)不相容时,满足 AXB+CYD-E=min的最小二乘解的一般形式为

其中y为适当维数的任意向量。
[1]Chu K E.Singular Value and Generalized Singular Value Decompositions and the Solution of Linear Matrix Equations[J].Linear Algebra Appl,1987,88:83 -98.
[2]Xu G P,Wei M S,Zheng D S.On Solutions of Matrix Equation AXB+CYD=F[J].Linear Algebra Appl,1998,279:93 -109.
[3]Liao A P,Bai Z Z,Lei Y.Best Approximate Solution of Matrix Equation AXB+CYD=E[J].SIAM J Matrix Anal Appl,2006,27(3):675 -688.
[4]袁仕芳,廖安平,雷渊.矩阵方程AXB+CYD=E的对称极小范数最小二乘解[J].计算数学,2007,29(3):203-216.
[5]蒋家尚,袁永新.Symmetric Solutions of the Matrix Equation AXB+CYD=E[J].南京大学学报:数学半年刊,2008,25(2):141-148.
[6]方玲,廖安平,雷渊.矩阵方程AXB+CYD=E对称最小范数最小二乘解的极小残差法[J].高等学校计算数学学报,2010,32(1):71 -81.
[7]任俊艳,任颜波,郑华杰,等.交换环上矩阵的加权Moore-Penrose逆与其加边矩阵[J].河南科技大学学报:自然科学版,2011,32(1):79 -81.
[8]任俊艳,赵丽英.环上矩阵的加权Moore-Penrose逆[J].河南科技大学学报:自然科学版,2009,30(2):78-81.
[9]戴华.矩阵论[M].北京:科学出版社,2001.
猜你喜欢
中等数学(2022年6期)2022-08-29 06:15:08
数学物理学报(2022年4期)2022-08-22 04:06:44
数学物理学报(2020年3期)2020-07-27 01:19:56
校园英语·上旬(2019年6期)2019-10-09 04:08:57
中学生数理化·七年级数学人教版(2017年6期)2017-11-09 02:45:57
中国校外教育(下旬)(2017年8期)2017-10-30 17:32:36
数学物理学报(2017年3期)2017-07-01 16:18:48
数学物理学报(2016年5期)2016-08-24 07:38:40
数学物理学报(2016年6期)2016-04-16 04:40:58
新疆大学学报(自然科学版)(中英文)(2014年3期)2014-11-02 07:52:38