
基于海天线提取的红外小目标检测方法
2012-07-13 03:07吴玉雯
电子设计工程 2012年6期
马 俊,吴玉雯
(上海海事大学 信息工程学院,上海 201306)
海上红外小目标检测是海上搜救面临的主要问题之一。关于海上红外小目标检测算法,国内外学着对此进行了大量的研究,目前已有很多研究成果。Katherine Hanton等提出了采用超分辨率图像重建和反卷积的方法来改善目标检测的性能[1]。A.Onur Karali根据海面目标红外波段特征提出了一种新的自适应图像增强技术。吴一全,纪守新,尹丹艳提出了提出一种基于双树复小波变换和独立分量分析(ICA)的检测方法[2]。於时才,吴键提出了一种运动背景下的运动目标检测新方法[3]。但由于海洋环境的复杂性和特殊性,至今没有一种完善的方法能够实现海上各种环境下的红外小目标检测。笔者根据海上红外图像的特点,在这方面开展了研究工作。
单帧海上红外图像可划分为天空区域、海天线区域和海面区域[4]。就远景目标而言,其一般出现在海天线附近。因此,为了有效地检测到远距离弱小目标,若能对海天线进行准确定位则能够缩小舰船运动检测的范围,则可以提高检测速度和准确性。
另外,远景目标在红外图像中所占的面积较小,容易受到海波、云层等噪声的影响。通过提取海天线区域再对其进行检测,从而能够有效地减少各种影响因素的干扰和提高检测的效率。
1 边缘检测
两个具有不同值的相邻区域之间总存在边缘,边缘是灰度值不连续的表现。由于边缘是图像上灰度变化最剧烈的地方,传统的边缘检测就是利用了这个特点,对图像各个像素点进行微分或求二阶微分来确定边缘像素点。根据数字图像的特点,图像处理过程中常采用差分来代替导数运算。
1 .1 灰度阈值分割
通过对实际拍摄的部分图像分析来看,天空和目标的灰度值要明显高于海面的灰度值,因此可以在边缘检测之前采用阈值分割的方法来获取目标潜在的区域。阈值分割法是一种简单有效的图像分割方法。比较常用的阈值化处理就是图像的二值化处理,即选取某一门限阈值,灰度值高于门限的图像部分属于目标区域,置为255;灰度值低于门限的区域则属于背景区域,置为0。其数学表达式为:

其中,fT(x,y)是经阈值处理过后的图像 ,f(x,y)是原图像,T为阈值。
在阈值分割中,重要的是阈值的选取。针对本文实际情况,最终选取最大差值阈值选取法。其分割阈值表达式为

其中k为经验常数。通过大量的实验,本文选取k值为0.65。
1.2 Canny算子
Canny算子是一类具有优良性能的边缘检测算子,它在许多图像处理领域得到了应用。其基本思想是:先对预处理的图像选择一高斯滤波器进行平滑滤波,然后采用一种称为“非极大抑制”的技术对平滑后的图像进行处理,得到最后所需要的边缘图像。具体实现过程如下:
1)用高斯滤波器对图像滤波,以滤除图像中的噪声。其中,二维高斯分布函数的表达式为

式中,σ是方差,用于控制图像的平滑程度。对于离散的数字图像,需要对高斯分布函数进行离散化。理论上讲,二维离散化高斯分布需要一个无穷大的卷积模板。但在实际中,当中心点的距离大于3倍方差时,模板系数可以近似为0。因此,实际应用时可以截去近似为0的区域。
2)对滤波后的图像,利用一阶微分算子计算梯度的大小M(i,j)和方向 θ(i,j)。 在计算一阶微分时,对数字图像采用差分近似。在计算中过程中,采用两个2×2大小的模板P和Q来计算x方向和y方向的一阶差分,从而得到梯度的大小与方向分别为
M(i,j)反映了边缘强度,θ(i,j)反映了边缘的方向[5]。使得M(i,j)取得局部最大值的方向角 θ(i,j)反映了边缘的方向。
3)对梯度进行“非极大抑制”。仅仅根据得到的全局梯度还不足以确定边缘。为了确定边缘,必须保留局部梯度最大的点,而抑制非极大值。
4)用双阈值算法检测和连接边缘。选取两个阈值,一个低阈值T1,一个高阈值T2。将两个阈值分别作用于非极大值抑制图像,把梯度小于T1的像素的灰度值设为0,得到图像N1(i,j),把梯度值小于T2的像素的灰度值设为 0,得到图像N2(i,j)。 由于图像N2(i,j)的阈值较高,在去除大部分噪声的同时,也丢失了有用的边缘信息。而像素N1(i,j)的阈值较低,保留了较多的信息。 因此可以以N2(i,j)为基础,以图像N1(i,j)为补充来连接图像的边缘。
1.3 目标增强
实验结果表明,在对图像进行处理之前先对图像进行预处理,不但可以滤除孤立噪声点,还可以增强目标,有利于算法的实现。
文中采用以下方法来减少噪声:将两幅图像分别与自身相乘,这样原图不同灰度之间的差距将变得更大,灰度比较高的目标变得更加明显,然后进行一次7×7模板的中值滤波。经过前后两次处理,海浪较之前会有明显的减弱。这对改善检测效果起到了较好的作用。
2 海天线提取
图像中的直线提取可以有很多种方法,如Hough变换法、Radon变换法以及相位编组法等。由于Hough变换法具有很好的容错性和鲁棒性,用它来提取直线时所受噪声的影响会比较小,因此本文采用Hough变换来提取海天线。
直线y=ax+b可用极坐标表示为 ρ=xcosθ+ysinθ, 其中(ρ,θ)定义了一个从原点到线上最近点的向量,该向量与该直线垂直。Hough变换正是利用了图像空间和Hough参数空间的点线对偶性这个特点,从而将图像空间中的检测问题转换到参数空间。图像空间里一条直线上的点对应着一个参数空间累加器,并且直线上的每一点引起对应累加器的值增加1,进而在Hough参数空间形成一个与直线对应的局部最大值,通过检测Hough参数空间中的所有局部最大值,就可以确定与该条直线对应的一对参数(ρ,θ),从而将直线检测出来[6]。
3 实验结果
用本文所述的检测方法对大量随机抽取的红外视频帧进行目标检测实验。原始图像是用红外摄像机拍摄的海面船只,背景为天空和海面,像素大小为768×576。这里选取部分实验结果加以说明,如图1、图2和图3所示。其中,图1(a)、图 2(a)和图 3(a)均为原始图像,且图 3(a)只含单目标,而图1(a)和图2(a)均含双目标,且拍摄距离由近及远。目标由大变小,这样就能更好地说明算法的适用性。运用文中方法,海天线检测效果如图 1(b)、图 2(b)及图 3(b)所示。根据海天线的位置,再结合船只几何特点及灰度特性再对目标进行筛选和标记。 检测效果如图 1(c),图 2(c)和图 3(c)所示。 实验结果表明,本文算法取得了较为明显的效果。
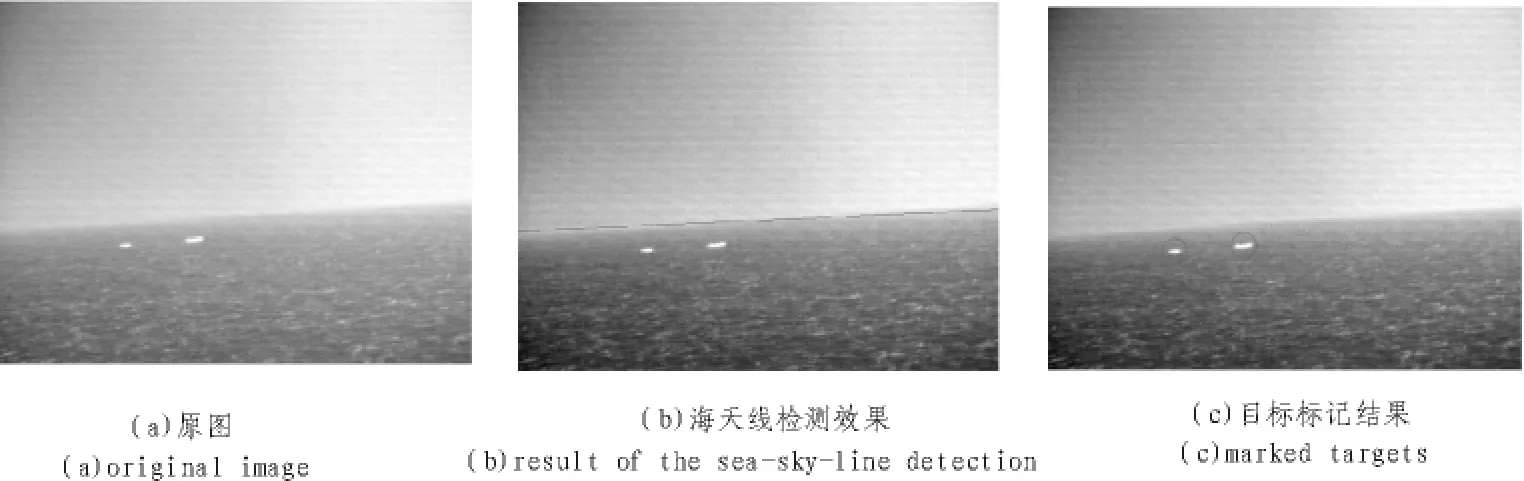
图1 视频10第576帧的处理结果Fig.1 Processing result of the 576th frame,10th video
图2 视频11第468帧的处理结果Fig.2 Processing result of the 468th frame,11th video
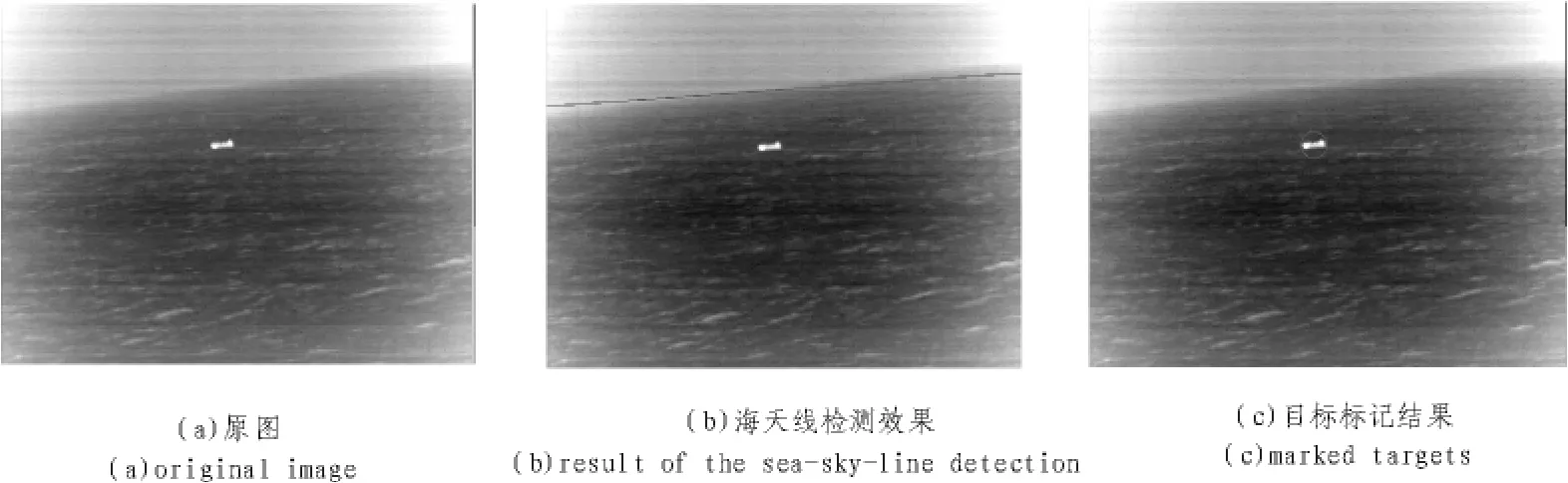
图3 视频12第100帧的处理结果Fig.3 Processing result of the 100th frame,12th video
4 结束语
借助海天线检测,本文提出了一种海上红外小目标检测方法。通过检测海天线,可以确定远景目标潜在的区域,从而就能缩小检测的范围,为进一步提高检测速度和准确性奠定了良好的基础。为此,本文探讨了基于Hough变换的海天线检测方法,并在此基础上对海上红外小目标进行了检测实验。结果表明,该算法可以有效地检测出海天线及目标所在的位置,具有一定的鲁棒性。当然本算法也有它的局限性,没有考虑到红外成像装置的运动,这也是今后要进一步研究的内容。
[1]Hanton K,Butavicius M,Johnson R,et al.Improving infrared images for standoff object detection[C]//Proceedings of the ITI 2009,31st International Conference on Information Technology Interfaces,Cavtat,Croatia.IEEE Press,2009:22-25.
[2]吴一全,纪守新,尹丹艳.双树复小波和独立分量分析的红外小目标检测[J].兵工学报,2010,31(11):1431-1437.
WU Yi-quan, JI Shou-xin, YIN-Dan-yan.Infrared small targetdetection based on dual-tree complex wavelet transform and independentcomponentanalysis[J].Acta Armamentarii,2010,31(11):1431-1437
[3]於时才,吴键.运动背景下的运动目标检测方法[J].计算机真,2011,28(2):292-295
YU Shi-cai,WU Jian.A method for the detection of moving targetin moving background [J].ComputerSimulation,2011,28(2):292-295.
[4]董宇星,刘伟宁.基于灰度特性的海天背景小目标检测[J].中国光学与应用光学,2010,3(3):252-256.
DONG Yu-xing,LIU Wei-ning.Detection of sea-sky line in complicated background based on grey characteristics[J].Chinese Journal of Optics and Applied Optics, 2010,3(3):252-256.
[5]何友金,李楠.舰船红外图像边缘检测方法对比研究[J].计算机仿真,2006,23(4),201-203.
HE You-jin,Li Nan.A comparison study of edge detection algorithms for ship IR image[J].Computer Simulation,2006,23(4),201-203
[6]张兆伟,马治国,钱超,等.红外图像中海天线的提取[J].海军工程大学学报,2005,17(3):97-99.
ZHANG Zhao-wei,MA Zhi-guo,QIAN Chao, et al.Location horizontal region of infrared image [J].Journal of naval University of Engineering, 2005,17(3):97-99.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
环球时报(2022-05-23)2022-05-23
金桥(2021年4期)2021-05-21
电子制作(2019年7期)2019-04-25
自动化学报(2017年5期)2017-05-14
通信产业报(2016年44期)2017-03-13
光学精密工程(2016年3期)2016-11-07
光学精密工程(2016年1期)2016-11-07
电视技术(2012年21期)2012-06-07
雕塑(1999年2期)1999-06-28
