
基于改进的混合高斯模型的运动目标跟踪研究
2012-07-13 03:07刘永福谭建斌
电子设计工程 2012年6期
刘永福,谭建斌
(1.广东理工职业学院 广东 广州 510091;2.佛山职业技术学院 广东 佛山 528137)
目前,国外学者提出了多种针对不同应用条件的背景模型。Wren C的实时系统[1]对跟踪对象采用多类的统计模型,在初始化一个没有运动物体的背景后,这个系统能得到较好的效果,但在户外环境中,该算法跟踪效果不佳。Ridder C等人[2]采用Kalman滤波,对每个像素构建一个模型,该算法虽然能适应灯光的变化,但背景自适应能力缓慢,处理多层次的背景没获得满意的结果。
Friedman N等人[3]利用自适应混合高斯模型在处理光照变化、树叶抖动等获得较好的效果,但混合高斯背景模型采用固定学习权重,难以适应运动目标运动快慢变化。更新权重高导致慢运动目标误判为背景并引入大量噪声;更新权重低则在停滞物体逃离背景时长时间留下前景运动物体和降低对光照变化的适应能力。
针对上述问题,对传统混合高斯模型作了改进,设计了自适应学习权重。结果表明基于改进的跟踪系统获得良好效果。
1 混合高斯背景模型
1.1 混合高斯密度函数
Grimson 和 Stauffer中提出的背景模型[4-5]采用K(3~5)个高斯分布统计每帧中相同像素点的最近t帧值 (X1,X2,…,Xt),从而得到下一像素点值在当前帧的密度概率函数:


式中,ωi,t表示t帧的值(X1,X2,…,Xt)落入第i个高斯分布的比率,μi,t和 Σi,t分别表示高斯分布的期望值和方差,Σi,t=(假设像素点的GRB个分量互相独立,且有相同的方差,I为单位矩阵)。K个高斯分布总是按照优先级 λi,t=ωi,t/σi2,t(i=1,2,…,K)从高到低的次序排列,ηi,t为与 ωi,t对应的高斯分布。
1.2 混合高斯模型更新和背景生成
对某像素点的每个新样本点Xt+1判断其与已存在的K个高斯分布进行匹配,若满足条件|Xt+1-μt|<2.5σi,则Xt+1与该分布匹配。如果Xt+1都不匹配,则增加新高斯分布或者用新高斯分布代替λ最小的分布。新的高斯分布以Xt+1作为均值,方差用经验值30。
高斯分布权重、均值和方差分别按式(3)、式(4)和式(5)更新。对于匹配的分布Mi,t+1=1,否则Mi,t+1=0。不匹配的分布,均值和方差都保持不变。

高斯模型更新完毕后,从新排列优先级λi,t,取前B个高斯分布生成背景:

该模型中有2个重要参数α(学习权重)和H,其中1/α表示训练P(Xt)的最大样本空间中的样本点个数;H用来确定作为背景模型的分布,H取经验值0.8。
2 自适应学习权重
传统混合高斯背景模型采用固定学习权重,难以适应目标运动快慢变化,易把缓慢运动目标融入背景中,从而引起误检测。图1(a)是没有出现目标缓慢挪动的背景模型;图1(b)是运动目标在A位附近进行缓慢挪动的原视频帧;若采用固定学习权重更新背景,当运动目标出现缓慢运动时,背景模型会出现图1(c)长期留下运动目标痕迹。
2.1 目标分割
文灏等人[6]采用背景模型直接对当前帧相减,以此获得运动目标。但在运动目标检测过程中,常因快速的光照变化、树叶运动时反射色差较大或运动目标颜色和背景颜色相似而导致背景区出现大片干扰或目标区内断裂和空洞现象。本文采用极限误差作分割标准,在高斯模型中随机量落在极限误差3σ以外认为是前景。某像素点Xt+1满足|Xt+1-μt|>3σi,则判为前景,将该像素点R、G、B 3分量置为255,反之则判为背景并置0。该法不但填补了目标体内的裂痕和空洞,而且在背景区引入的噪声少。图2(c)为极限误差分割法的前景,比图2(a)直接相减后得到的前景区,其含目标体内裂痕、空洞和背景区的噪声明显要少。

图1 受缓慢运动目标影响生成的背景模型Fig.1 Background model is interferenced by slow moving target
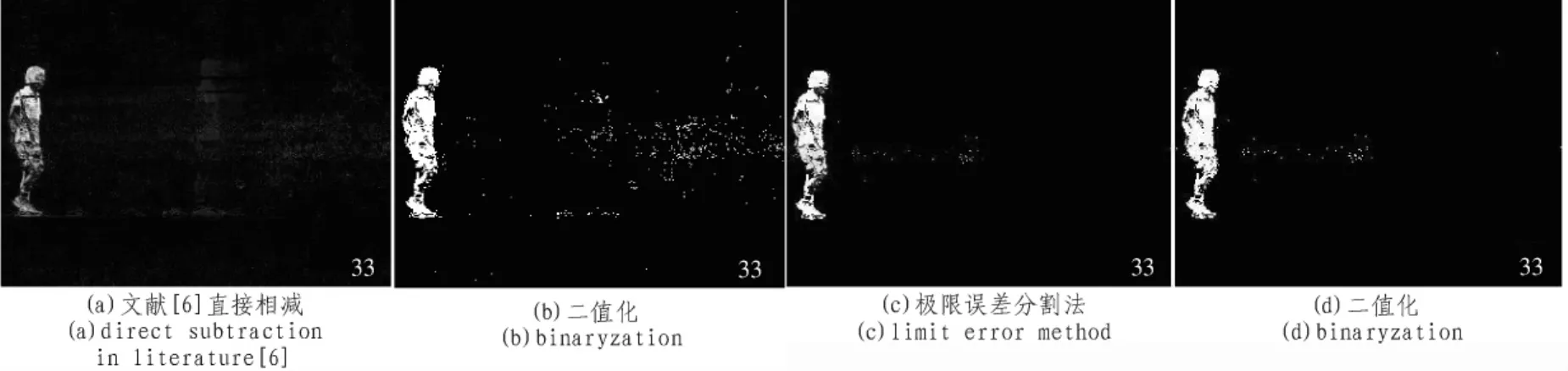
图2 运动目标检测Fig.2 Moving target detection
2.2 小面积噪声消除
系统设计是面对室外复杂环境的目标跟踪,改进后的背景模型虽然能消除树叶的轻微抖动、光照的缓慢变化,但在较大的风速或背景颜色和前景颜色接近时,便不可避免在目标分割后存在一些小面积的噪声。
常用的消噪方法有形态学闭运算或是中值滤波,但对于小面积噪声消除不净,且易造成目标的变形或目标裂痕加大。因此设计了基于标记的小面积噪声消除法。
一般地,二值化后的图像中单个运动目标都是较大的连同区域,而噪声的面积比目标小得多。直接把连通区域像素标记为同一目标,计算各个分离目标的面积(像素个数),将面积小于预定阈值的像素置0,从而保留了面积大于预定阈值的目标。
设:带噪声二值图像为 f(x,y),宽为 w,高 h,即像素(x,y)的灰度为 f(x,y),x=0,1,…w-1;y=0,1,…h-1。 x 为横坐标,y为纵坐标,图像左上角为坐标原点。图像背景为黑色,灰度值为0;运动物体为白色,灰度值为1。
图像像素(x,y)对应像素的物体编号为 I(x,y)。 当前物体编号为K,K=0,1,…,M。背景像素物体编号K=1,当某一像素的物体编号K=0时,表示该像素还没有被标定属于那个物体。物体编号最大值M为当前帧中非连通块的个数。
物体编号为K的像素个数为N(K),并设定阈值为Yu。当前景图像(x,y)的邻近坐标为(u,v),其中 x-1≤u≤x+1,y-1≤v≤y+1,且(u,v)不等于(x,y)。 消除噪声算法步骤如下:
1)给像素编号
①初始K=1。对每一个像素(x,y),若该像素为黑色目标像素,则设置物体编号I(x,y)=1;否则该像素为背景像素即灰度 f(x,y)=0。
②从坐标y=1,x=1,物体编号K=0开始。
③判断当前坐标位置像素的物体编号。若当前像素物体编号 I(x,y)=0,执行下一步,否则当前像素的物体编号 I(x,y)不等于0时,转步骤⑦。
④当前物体编号K增加1。
⑤递归函数开始。将当前像素物体编号I(x,y)置为K。
⑥当前像素有8个邻近像素,邻近像素坐标为(u,v)。若物体编号 I(u,v)为 0,则将(u,v)视为当前像素,递归调用步骤⑤;否则下一步。递归完毕。
⑦当前坐标位置往右移动一个像素,即x=x+1。当超过右边边界,就往下一行左端移动,即y=y+1,x=0。若坐标没有达到右下角,则转步骤③,否则执行下一步。
2)计算每个编号的像素个数
①初始化 K=1,2,3,…M,令 N(K)=0;
②遍历每个像素,即对于 x=0,1,…w-1;y=0,1,…h-1,当编号 I(x,y)=K,令像素个数 N(K)=N(K)+1。
3)删除小面积噪声
若像素个数 N(K)<Yu,则遍历图像像素,对编号 I(x,y)=K的像素,令其灰度值为0。最后得到消除面积小于阈值Yu的噪声的运动目标图像。
2.3 区域细分与自适应权重
对33帧和34帧分别采用极限误差分割法和噪声消除后,得到图4(a)和图4(b)连续两帧的目标区。两帧差分得到图4(c)连续两帧目标间的变化区。变化区与33帧异或得过去目标区,如图4(d);变化区与34帧异或,得到当前目标区。变化区域被分割成属于过去一帧(33帧)的过去目标区和属于当前帧(34帧)的当前目标区,分割结果如图4(d)和图4(e)所示。

图3 消噪后的图像Fig.3 Image after eliminating noise
在运动目标运动缓慢时,易给混合高斯背景带来大片干扰(如图1(c)示),本文采用自适应更新权重消除此干扰。对背景区域采用小的更权重(α取0.002),以维护高斯模型的统计特性;对过去目标区采用较大更权重(α取0.1),可消除运动目标由于缓慢运动留下的痕迹;而对当前目标区不作更新,消除当前帧运动目标给背景模型引入干扰。
3 实验结果

图4 区域细分Fig.4 Regional breakdown
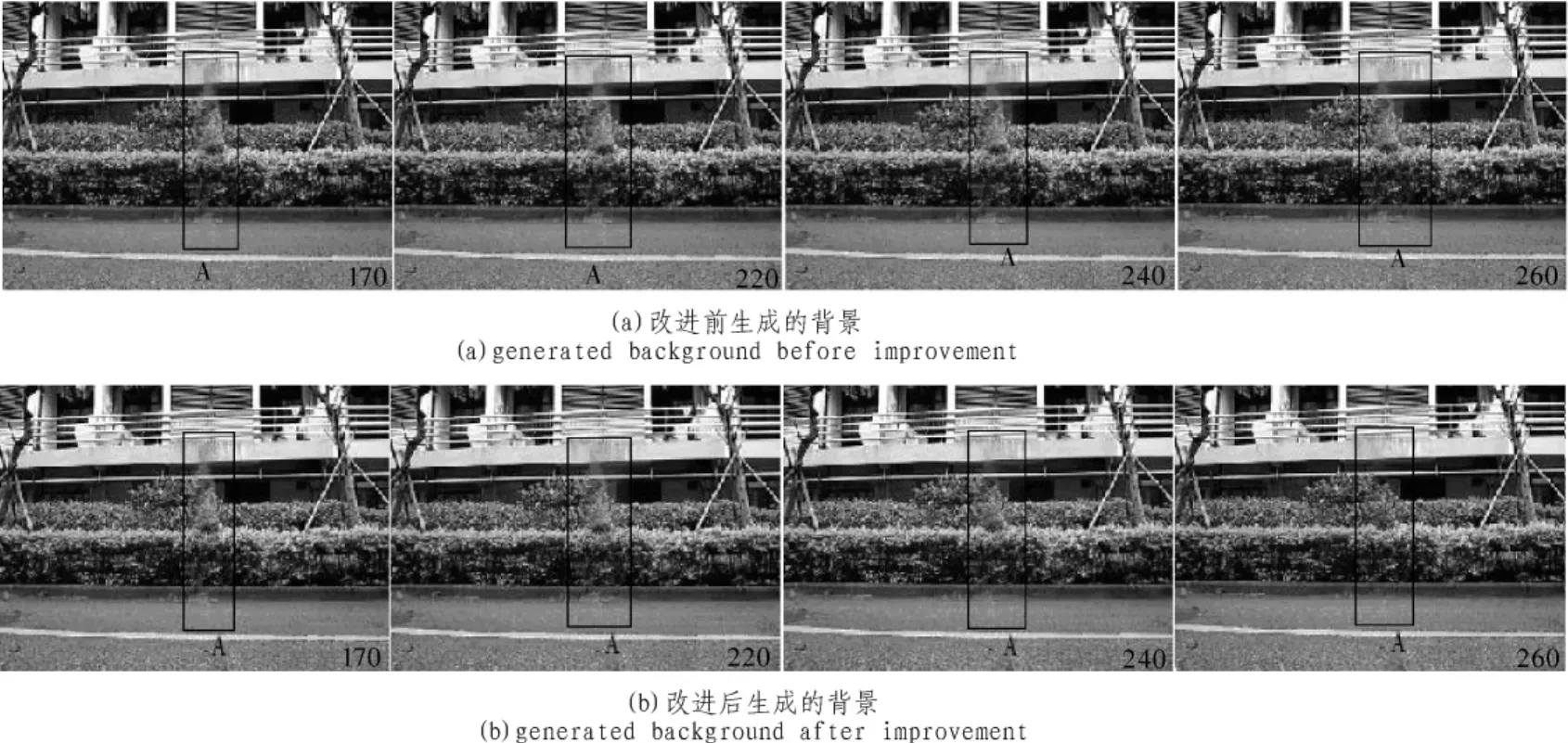
图5 算法改进前和改进后效果对比Fig.5 Algorithm comparison results before and after improvement
对在风力4级,存在树叶抖动剧烈的室外环境下拍摄的视频进行仿真实验,测试软件为MATLAB7.0。图5(a)为原算法背景模型,由于运动目标出现停滞而留下的干扰难消除。图5(b)为改进后背景模型,在运动目标出现停滞的处获得了较满意的修复效果。
基于改进后的背景模型,运动目标系统在室外复杂环境下获得了良好的跟踪效果。跟踪效果如图6所示。

图6 跟踪结果图Fig.6 The figure of tracking results
4 结 论
对传统混合高斯背景模型作了改进,有效消除传统模型中难以适应运动目标出现缓慢运动而引入噪声的情况。因采用了噪声消除和目标间差分,很好区分了背景不同性质区,对不同区域用不同学习权重,是背景模型具有自适应性,因此背景模型在受运动目标干扰的区域得到快速的修复。实验结果表明,该算法有效的提高了混合高斯背景模型的鲁棒性,为后继运动目标检测、识别、跟踪提供了良好基础。
[1]Wren C,Azarbayejani A,Darrell T,et a1.Pfinder:real-time tracking of the human body[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1997,19(7):780-785.
[2]Ridder C,Munkelt O,Kirchner H.Adaptive background estimation and foreground detection using Kalman·filtering[C]//Tuekey:In:Proceedings of the Int’1 Conference on Recent Advances Sinmechatronics,1995:193-199.
[3]Friedman N, Russell S.Image segmentation in video sequences:Aprobabilisticapproach[C]//USA:In:Proceedingsofthe13Conference on Uncertainty in Artificial Intelligence,1997:175-181.
[4]W E mixture models for Stauffer C.GrimsonL.Adaptive background real-time of IEEE Conference on tracking[C]//USA:In:Proceedings Vision and Pattern Collins,Computer Recognition,1999:246-252.
[5]Stauffer C,Grimson W E L.Learning patterns activity using real time transactions pattem and machine tracking[J].IEEE Analysis InteHigence,2000,22(8):747-757.
[6]文灏,陈红涛.基于减背景与对称差分的运动目标检测[J].微计算机信息,2007,23(9):18-20.
WENHao,CHENHong-tao.Movingobjectsdetectionalgorithm based on background subtraction and symmetrical differencing[J].Microcomputer Information,2007,23(9):18-20.
猜你喜欢
数字通信世界(2021年3期)2021-04-09
湖北理工学院学报(2020年4期)2020-08-22
中学生数理化·高一版(2020年1期)2020-02-20
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
中学生数理化·八年级物理人教版(2018年10期)2018-12-06
计算机应用与软件(2017年4期)2017-04-24
电影故事(2015年16期)2015-07-14
科普童话·百科探秘(2015年4期)2015-05-14
智慧与创想(2013年3期)2013-05-09
