
基于DSP的船用蓄电池分级恒流充电控制系统
2012-07-12 05:56李小谦
舰船科学技术 2012年5期
李小谦,谢 炜,耿 攀,雷 津
(1.武汉第二船舶设计研究所,湖北 武汉 430064;2.海军驻719所军事代表室,湖北 武汉 430064)
基于DSP的船用蓄电池分级恒流充电控制系统
李小谦1,谢 炜1,耿 攀1,雷 津2
(1.武汉第二船舶设计研究所,湖北 武汉 430064;2.海军驻719所军事代表室,湖北 武汉 430064)
提出了1种基于DSP的船用蓄电池分级恒流充电控制器的方案,分析了控制器硬件及软件的结构和功能,并在大功率直流电力系统平台上进行了实验验证,结果表明控制器的性能良好。
DSP;分级恒流控制;船用蓄电池
1 概述
某些船舶采用电力推进方式,其特点是一次动力源为柴油发动机,二次动力源为蓄电池,在柴油机动力不足或者特殊工况下由蓄电池提供主要动力。另外,蓄电池还能增加其水下续航能力,提高作战隐蔽能力。本文研究的蓄电池充电系统包括4台整流柴油发电机、2组蓄电池、直流负载、保护装置及充电控制系统等。该系统电网结构如图1所示。其中1号和3号柴油发电机为1组,Icf1和Icf3为2台柴发充电电流,与1号蓄电池组直接并联,蓄电池充电电流为Idc1;2号和4号柴油发电机为1组,Icf2和Icf4为2台柴发充电电流,与2号蓄电池组直接并联,蓄电池充电电流为Idc2;2组蓄电池分别并接负载后通过限流保护装置Rx并联。蓄电池分级恒流充电控制系统作为充电系统的核心,要求其尽可能地在延长蓄电池使用寿命的基础上在规定的时间内使蓄电池快速充足电量。它的主要任务是根据给定的电流级别经过计算输出4~20 mA的恒流控制信号,该信号经过励磁调节器放大后去控制柴油发电机的励磁电流,从而使2组蓄电池的充电电流值达到给定的充电电流级别。
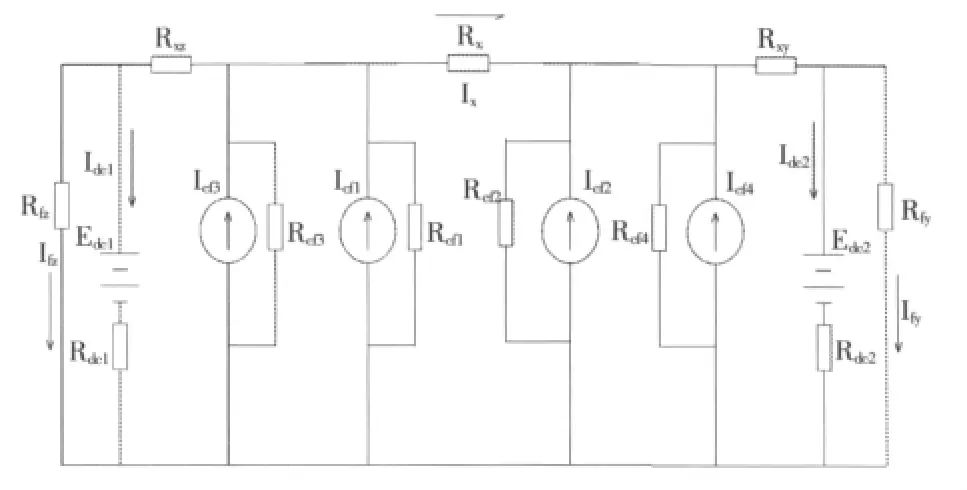
图1 恒流充电等效模型Fig.1 Equivalence model of constant-current charge
2 蓄电池充电系统的控制策略
充电系统的充电电源为4台柴油发电机,有恒流或恒压2种工作模式,一般发电机恒压充电工作于手动工况,需要实时调节控制电位器来调节充电电流,操作强度大,而自动充电工作于恒流模式,采用多级恒流与浮充恒压充电方案,自动充电方案具体如下:
1)将充电过程分段
将蓄电池整个充电过程分为6个恒流阶段和1个浮充阶段。根据经验选择2 400 A,1 800 A,1 200 A,900 A,600 A和300 A作为上述6个恒流阶段的充电设定值。
2)各充电阶段终止控制策略
主要基于每阶段的蓄电池端电压值。当蓄电池端电压达到设定的阈值时,便进入恒压充电阶段,充电电流将逐渐减小,同时提示转入下一充电阶段。
3)浮充阶段的充电控制策略
当切换到浮充档后若此时蓄电池端电压没有达到所设定的浮充电压值,则充电电流限制在100 A内。当达到浮充电压值时,控制蓄电池组的充电电流为0,使蓄电池组处于既不充电又不放电的状态。
4)发电机的投入和推出策略
柴油发电机的工作电流有最大上限,有功率缺额时,需要提示投入新的柴油发电机弥补缺额,并且操作投入柴油发电机后能自动均流,减小冲击;柴油发电机处于轻载或空载状态,特别是在柴发低于25%负载并联运行时易出现振荡,需要提示退出柴油发电机,避免振荡,提高燃油效率。
5)功率保护越限策略
在柴发满功率的情况下,不是所有的情况下柴发都能输出额定电流,当蓄电池电压升高到一定值后,需要实时计算此时的最大充电电流上限值,避免柴油发电机功率越限。
3 基于DSP的充电控制器硬件电路设计
如图2所示,整个硬件电路主要包括2组蓄电池电压电流检测及采样电路、4台柴油发电机投入状态开关量检测电路、4台柴油发电机励磁状态开关量检测电路、充电电流分级开关信号检测电路、4台柴油发电机控制信号D/A输出及隔离电路、CAN通讯接口电路等。

图2 充电控制系统硬件总体框图Fig.2 General diagram of charging control system
3.1 蓄电池组电压电流检测及采样电路
2组蓄电池组的电压、电流的取样都是通过霍尔传感器来实现的,其采样信号经过调理电路、RC滤波电路接入芯片 TLV2544的模拟输入通道,经A/D转换后,通过高速光耦隔离电路6N137将串行数据送入DSP。
3.2 4路恒流控制信号输出电路
DSP计算的控制量是数字量,因此需要将其转化为模拟信号才能作为4台柴油发电机励磁的输入信号。4路数字控制信号通过光耦隔离电路,驱动4路具有独立隔离电源的模转换芯片DAC7512产生输出0~5 V的电压信号,柴油发电机的励磁调节器是由电流信号驱动的,故采用由AD694恒流源电路把0~5 V电压信号转化为4~20 mA的电流信号。
3.3 电压限幅值下传通讯电路
蓄电池使用一段时间后,充电特性会发生变化,为便于维护蓄电池,上位机可以通过CAN隔离通讯接口将修改后的电压保护限幅值下传到控制板上,并在数据效验合格后存储于EPROM中,提供快捷的用户接口。
4 基于DSP的充电控制器软件设计
在以TMS320LF2407为核心构成的蓄电池恒流充电控制系统中,其软件功能可分解如下:
1)实现检测信号的A/D变换和控制信号的D/A转换;
2)实现蓄电池多级充电电压限幅数据下载存储;
3)实现电压外环、电流内环的PI控制算法;
4)实现4台柴油发电机的投入和退出逻辑控制及指示。
主程序要完成系统和所需各个功能模块的初始化,进入主程序中循环执行,等待T1周期中断的发生。T1中断周期为20 ms,是程序调用的最小时间节拍。一旦T1周期中断发生,DSP自动执行T1周期中断服务子程序,完成0~9的循环计数,即一个调节时间步长为200 ms,其间以时间片来调度蓄电池电压、电流共4路检测信号的A/D变换、PI调节算法、投入逻辑控制、D/A转换及通讯接口的数据查询。
在蓄电池恒流充电控制系统中,由于柴油发电机输出恒定电流,而充电电流的变化会直接影响端电压的变化,设计了电压环、电流环双环的PI控制结构,如图3所示。其中电压环为外环,在2 400 A,1 800 A,1 200 A,900 A和600 A充电电流级别时,设定的电压给定值为蓄电池的过充保护电压值,在300 A时设定为浮充电压值。当端电压没有达到该电压值时,电压环将输出与充电电流级别关联的饱和值,这时电流环起主要作用;当蓄电池达到该电压值时,电压环才起作用。

图3 电压、电流环双环PI控制原理Fig.3 Diagram of voltage-current double loop PI Controling system
电压环和电流环调节采用PI调节器。根据双环控制的结构特点,选用增量式PI调节器算法。增量式PI调节器算法的表达式是[1]:

图4给出了PI调节器的结构框图,为了防止溢出,设置了输出饱和限制。PI调节器的参数值(k1和k2)整定比较复杂[2],需要通过实验来整定。

图4 PI调节器结构Fig.4 Structural diagram of PI controller
根据上面的主要思想,可以得到系统的电压和电流双环PI控制流程图如图5所示。

图5 电压、电流环PI控制流程Fig.5 Flow process chart of voltage-current double loop PI Controling system
5 试验结果
在进行实际系统联调实验时,在蓄电池充电系统模拟测试平台上根据几种典型的工况验证了控制器的性能。
第1种工况:蓄电池并联充电,1和2号发电机投入,将充电电流级别从1 200 A逐级切换到0 A档,观察蓄电池各级充电电流响应情况。以1 200 A切换到900 A为例,图6给出了充电电流较大一组蓄电池的响应情况。
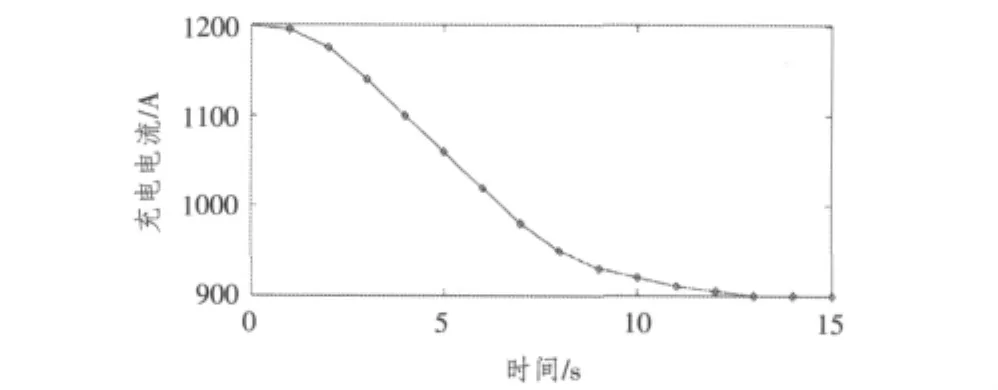
图6 充电电流较大一组蓄电池的响应情况Fig.6 Battery charging response with higher current
由图6可看出,充电电流调节过渡过程比较平缓,调节时间为12 s左右,符合实际系统的要求。
第2种工况:蓄电池并联充电,1和2号发电机投入,将充电电流级别切换为900 A,观察蓄电池充电电压上升,达到保护值545 V时充电电流的变化。
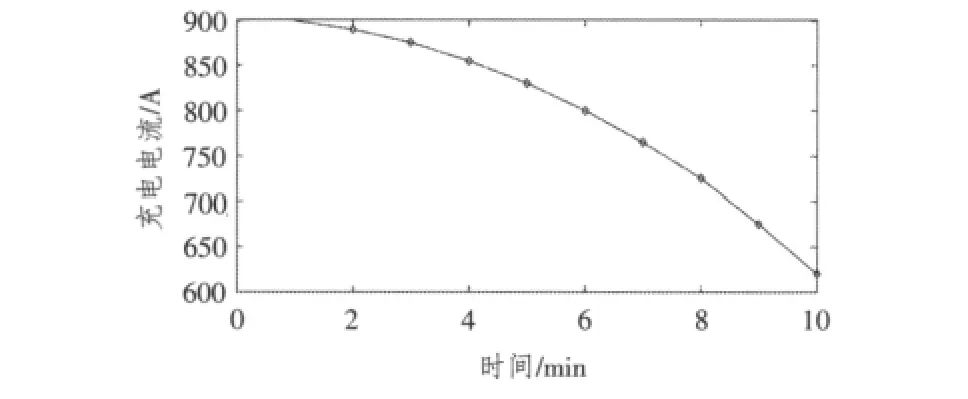
图7 恒压保护时蓄电池充电电流变化Fig.7 Battery charging response with constant-voltage protecting
从图7可见,蓄电池端电压达到设定值时,充电电流会逐渐减小。这时充电电流的控制进入电压、电流双环调节的阶段,为了维持端电压恒定,充电电流必然要减小,但变化过程要求比较平缓。
6 结语
该控制器的各项性能指标完全达到了设计的预期要求。在后续的研究中还要继续2方面的工作:一是设计友好方便的人机界面或者交互接口;二是反馈PI环参数和电压、电流的采样值和方向,用于监控控制器的工作状态,以提高控制系统的可靠性和安全性。
[1]高金源.计算机控制系统-理论、设计与实现[M].北京:北京航空航天大学出版社,2001.
GAO Jin-yuan.Computercontrollersystem-theoryand design and implementation[M].Beijing:Beijing Aerospace University Press,2001.
[2]赖寿宏.微型计算机控制技术[M].北京:机械工业出版社,2003.
LAI Shou-hong.A micro-computer control technology[M].Beijing:Mechanical Industry Press,2003.
Research on multi-constant current charging control system for batteries used in ship power station
LI Xiao-qian1,XIE Wei1,GENG Pan1,LEI Jin2
(1.Wuhan Second Ship Design and Research Institute,Wuhan 430064,China;2.Navy Representation Office at 719 Research Institute,Wuhan 430064,China)
This paper presents a ship multi-constant current batteries charging controller based on DSP is designed,and the specific properties of the controller are verified through experiment on the highpower DC power system platform.
DSP;Multi-constant current charging;marin battery
U664.14
A
1672-7649(2012)05-0074-04
10.3404/j.issn.1672-7649.2012.05.017
2011-06-27
李小谦(1983-),男,工程师,研究方向为船舶电气及其自动化。
猜你喜欢
电气技术(2022年6期)2022-06-27
电力勘测设计(2022年3期)2022-04-07
电加工与模具(2021年1期)2021-02-25
中国新通信(2020年1期)2020-05-25
微电机(2019年10期)2019-12-02
智富时代(2019年6期)2019-07-24
智富时代(2019年6期)2019-07-24
微电机(2019年3期)2019-04-28
电子制作(2018年17期)2018-09-28
电脑知识与技术(2016年24期)2016-11-14
