浮力驱动式水下滑翔机姿态调节机构研究
2012-07-12 05:56:30孙善春
舰船科学技术 2012年5期
邬 明,孙善春
(中国船舶重工集团公司第七一○研究所,湖北 宜昌 443003)
浮力驱动式水下滑翔机姿态调节机构研究
邬 明,孙善春
(中国船舶重工集团公司第七一○研究所,湖北 宜昌 443003)
浮力驱动式水下滑翔机对我国海洋勘探和国防建设有着重要的应用前景。本文介绍了水下滑翔机的工作机理,对某一滑翔机,重点设计了实现姿态调整的横滚控制组件和俯仰控制组件,同时提出总体布局的原则,并给出了滑翔机总体结构布局方案。对所设计的滑翔机的总体衡重参数和流体动力参数进行了计算,初步验证了总体设计方案的可行性,可以满足设计指标要求。
浮力驱动;滑翔机;机构设计;结构布局
0 引言
浮力驱动式水下滑翔机就是通过浮力驱动、翼型固定的自主水下装置。水下滑翔机最显著的特点是航行时不需要主动推进力,它在水下环境中作纵向运动的动力来自垂直运动的能量转换,而垂直运动的动力则来源于自身浮力的改变。它具有超常的续航能力,其续航时间以月记,且造价相对同等续航能力的舰船更为低廉。
根据相关报道,美军已研制了一种“水下无人滑行艇”原理样机[1],滑行速度可达5 kn,续航期数月,航程数千英里,在水下执行侦查任务,收集军事与商业信息。远航程、低功耗、长航程将是未来水中兵器的重要发展方向之一,也是我国海军急需的一种武器装备[2]。
目前,海军还没有类似的水下滑翔机。本文以某外形设计完成的滑翔机(图1所示)为基础,结合设计指标机身排水体积 VB≤0.47 m3、最大滑行速度3.5 m/s、下潜深度H≥1 000 m,提出滑翔机姿态控制方案,设计实现姿态调整的横滚控制组件和俯仰控制组件,并给出滑翔机总体结构布局。
1 横滚控制
当水下滑翔机在纵平面作上浮、下潜前进运动时,需要利用横滚控制来抑制扰动产生的横滚,保持滑翔机在纵平面内运动。当滑翔机需要转向或作回旋运动时,则需要通过横滚控制来发动。如图1所示,其原理是:首先,调整可移内部俯仰质量块的位置,使质心产生沿x方向的位移(机体坐标系坐标原点在弹体的浮心,x轴与弹轴重合指向机头,y轴为横轴,与水平翼在同一个平面垂直x轴,z轴垂直与xy平面)[3],使滑翔机机首朝下尾朝上(或反之),进行下潜运动;然后使横滚控制质量块移动,使质心产生沿y方向的位移。使得主载体姿态产生+x方向的横滚角。此水动力作用在载体水平翼上的升力,产生1个xz平面的俯仰力分力和1个+y方向的回转力分力;水动力作用在尾翼上的升力产生1个xz平面的俯仰分力和-y方向的回转力分力,产生侧向运动,实现滑翔机的转向。如果保持滑翔机的侧向运动,则滑翔机做空间定常回转运动(等角速度绕Z轴旋转,同时以等俯仰角下潜,)运动轨迹成螺旋线。通过控制横滚角的大小,可以控制滑翔机的回旋半径和下潜速度。
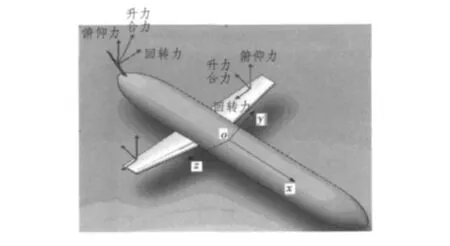
图1 载体下潜螺旋运动受力图Fig.1 Carrier submerge circle motion and force plot
考虑到本设计中滑翔机的机身为回转体的特点,这里的横滚控制采用旋转方式,利用偏心滑块(图2),通过旋转来实现滑翔机重心的侧向移动。
图2 横滚质心调节机构示意图Fig.1 Roll centroid adjusting structural plot
横滚控制系统总体结构设计如图3所示。偏心质量块装于2个支撑盘之间的支撑轴上,步进电机通过连轴器带动蜗杆旋转,蜗轮蜗杆副带动质量块旋转,从而形成质心侧移。
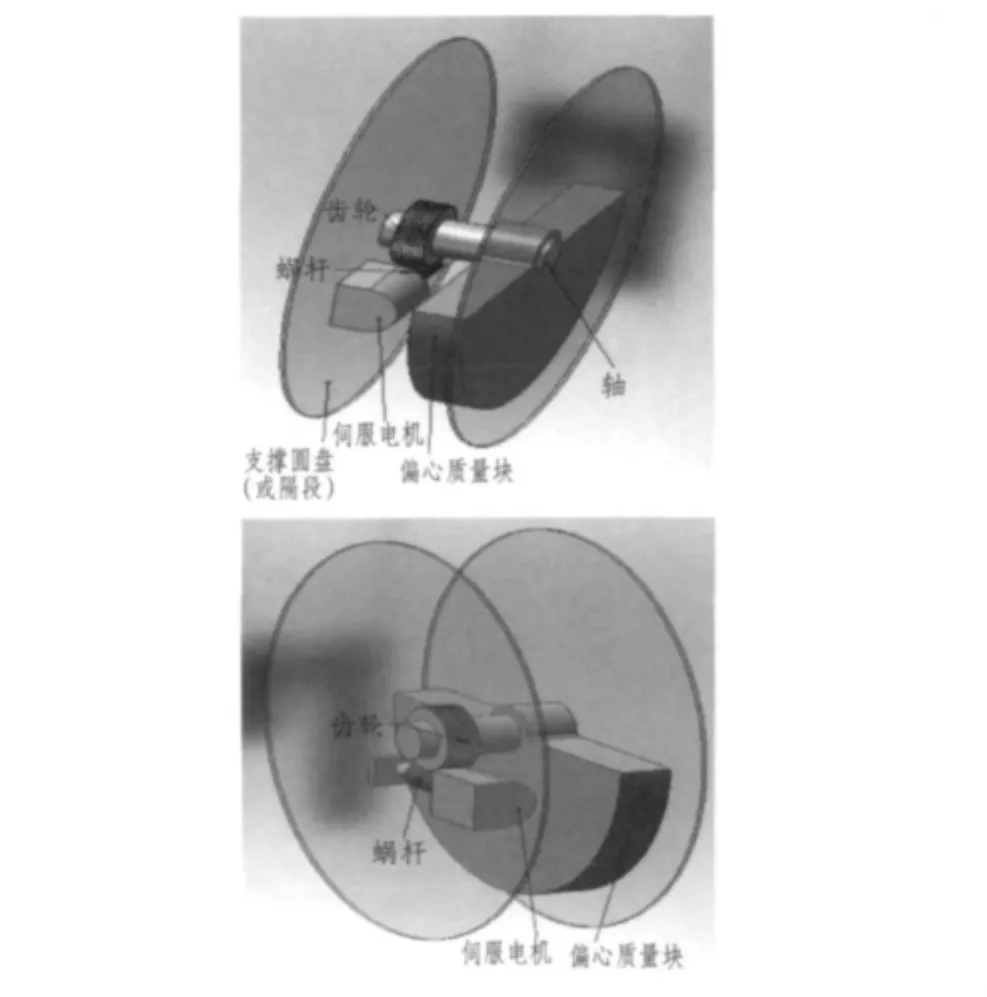
图3 横滚调节组件示意图Fig.3 Roll adjusting discreteness plot
半圆形质量块绕支撑轴做360°旋转,对支撑轴产生的力矩=质量×质心距离,距离支撑轴越远处的质量产生的力矩越大,所以要尽可能增加质量块的半径。质量块的半径受到螺杆位置的限制,螺杆距离支撑轴中心最近距离为182 mm,为了避免干涉,质量块半径设计为172 mm。预设计质量块厚度为40 mm,则质量块体积为

质量块材料采用普通钢,密度7.85 g/cm3,则质量块的总质量为14.59 kg。质量块的质心相对支撑轴中心位置由下式计算:
假设滑翔机的总质量为M,质量块质量为m,质量块相对滑翔机转过的角度为γ,稳心(浮心与质心的高度差)高为H,滑翔机的横滚角φ是由质心的偏移量与稳心高度之比决定的。由图4可建立质量块旋转与滑翔机横滚角之间的关系:

H表明质量块的转动对稳心高度产生了影响,使其升高了mR(1-cosγ)/M,重心偏移量y=mRsinγ/M。已知水下滑翔机质量为475 kg,稳心高度(重心下移量)为10 mm,则可以计算:
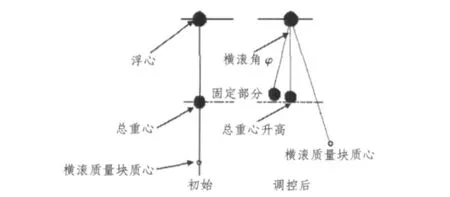
图4 横滚角计算图Fig.4 Roll angle computing plot

将式(4)对γ求导,令其导数=0,有

可求得,当γ=122.9°时,可以获得最大的横滚角φ =42°。
2 俯仰控制
俯仰控制是通过对俯仰控制滑块和压载舱(调节浮力的装置)的控制实现的。控制原理主要是在滑翔过程中根据滑翔机的姿态设计要求,通过调节俯仰控制块的纵向位置(x坐标的位置)来调节滑翔机质心和浮心的相对位置,从而使滑翔机获得所需的滑翔姿态角。
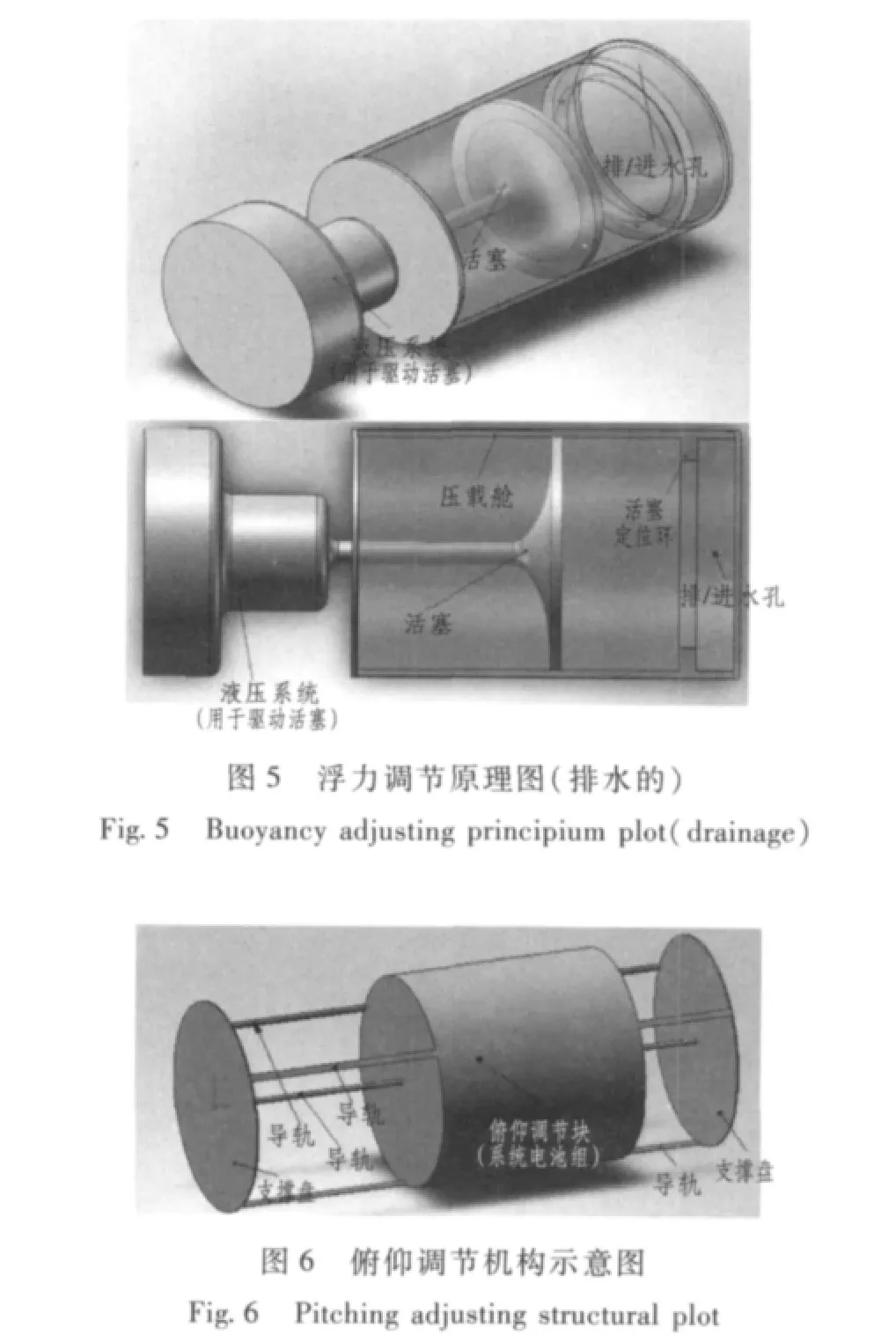
由于滑翔机设计的潜水深度达到1 000 m,压载舱在进水和排水时的环境压力变化大到10 MPa左右,所以在此次设计中,压载舱的设计主要采用了以下措施:
1)压载舱段用耐压壳体,压载舱总体积(排水/装水)为80 L,有效净浮力为±40*9.8 N;
2)执行机构采用液压系统,主要包括1个伺服电机,1个油缸(油缸4 000 mL)。
由于俯仰控制块运行环境是一个平衡压力环境,运动相对简单,其俯仰控制执行机构主要是1个电机、质量块和滑轨。主要任务是配合压载舱的重心变化,调节质量块前后移动,使滑翔机以预定的姿态角航行。为了充分利用滑翔机体内空间,质量块由系统的电池块充当。也就是用电池组的位移来调节滑翔机质心的位置。俯仰调节机构的原理如图6所示。
3 滑翔机总体布局
3.1 总体布局原则
1)浮力驱动式水下滑翔机的姿态调节是通过质心调节来实现的,其航向的改变通过滑翔机的横滚累积来实现。所以其布局首先要考虑质量布局,要能快速调整滑翔机的质心位置,满足滑翔机动力平衡和运动性能所提出的质心位置要求。
2)合理调整滑翔机的净浮力。本次设计的滑翔机为浮力驱动,其运动的动力皆来源于系统的净浮力。另外,在滑翔机浮出水面与外界进行通信时,必须保持一定的平衡姿态,而且有足够的正浮力能使滑翔机的通信设备以一定的姿态探出水面。
3)尽量减小内部系统和线路的迂回。减少内部系统和线路的迂回可以提高可靠性,减少传动的积累误差,同时可以减轻质量。
4)尽可能满足各机组、各装置的特殊要求。如液压系统,横滚传动系统、传感器组件的安装。同时考虑为其他特种水下探测设备的安装预留足够的接口和空间。
3.2 总体布局设计
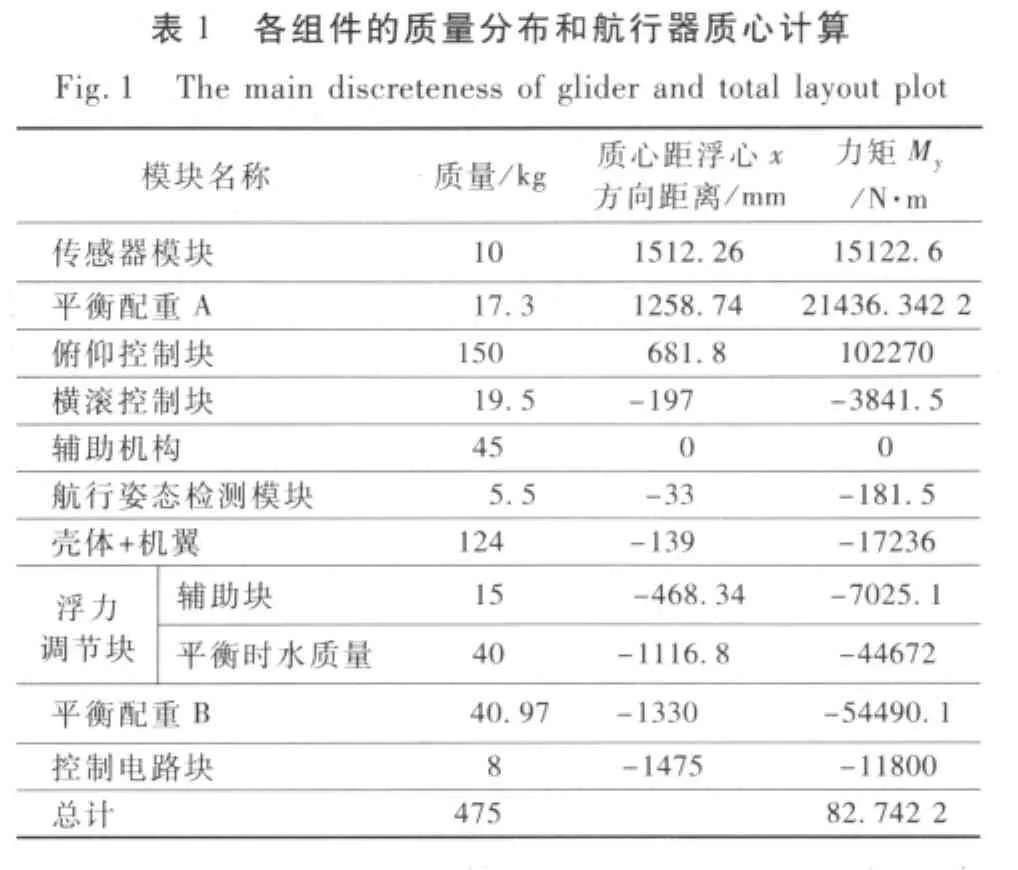
通过对滑翔机主要部件质量计算,根据总体布局原则和质心控制要求,对浮力驱动式水下滑翔机的主要组件进行了布局设计,如图7所示。

图7 滑翔机的主要组件与总体布局Fig.7 The main discreteness of glider and total layout plot
滑翔机各主要组件质量质心位置列于表1。滑翔机总质量475 kg,质心坐标(1 927.1,0,-10.0);排水体积 0.479 m3,浮心坐标(1 927.274,0,0)。根据目前的滑翔机总体布局,质心的轴向调节范围为:
1)在压载舱压载为40 kg时,x方向的调节范围为±100 mm。
2)在压载舱压载为80 kg时,x方向的调节范围为-130~99 mm。
现来验证所设计的滑翔机方案能否满足最大稳定滑行速度Vmax=3.5 m/s的要求。如前所述,当滑行角ε=35.26°[4]时获得最大滑行速度,根据文献[4]有:

利用相关软件可以算出,当α≈4°时,滑翔机升力系数CL≈0.011。因此所设计的滑翔机的升力可以满足最大稳定滑行速度Vmax=3.5 m/s的要求。
当 α=4°时,俯仰力矩系数 my(α=4°)= -0.002 6,滑翔机的力矩为

这个力矩通过移动滑动块改变质心位置来平衡,需要的质心轴向移动距离为

由前可知,所设计的方案,质心可调节范围为100 mm,因此可以满足滑翔机以最大稳定滑行速度滑行时的力矩平衡的要求。
?
当α=4°时,阻力系数Cx=0.006 7。滑翔机产生的阻力可根据下式[4]计算:

滑翔机以最大滑行速度滑行时的净浮力产生的主动力为

可见,所设计的滑翔机方案,可以实现最大稳定滑行速度Vmax=3.5 m/s的指标。
4 结语
本文在分析了浮力驱动式水下滑翔机总体设计要求和原则的基础上,结合具体设计指标,对外形设计完成滑翔机提出了利用质心调节法的姿态控制方案,设计了实现姿态调整的主要功能组件——横滚控制组件和俯仰控制组件,并进行了总体布局设计。最后,对所设计的滑翔机的总体衡重参数和流体动力参数进行了计算,初步验证了总体设计方案的可行性,可以满足设计指标要求。
[1]刘淮.美国海军无人水下航行器的发展重点和特点[J].船舶工业技术经济信息,2005,(238):26 -32.
LIU Huai.The united states navy unmanned underwater vehicle development key and Characteristic[J].Technology and Economy Information of Shipbuilding Industry,2005,(238):26-32.
[2]符敏,吴乔.国外无人潜水器研制概况与发展趋势[J].水雷战与舰船防护,2004,(2):48-51.
FU Min,WU Qiao.Foreign unmanned submersible research survey and development tendency[J].Mine Warfare & Ship Self-defence,2004,(2):48 -51.
[3]阚雷,张宇文,范辉,等.浮力驱动式水下滑翔机运动仿真[J].计算机工程与应用,2007,(18):199~201.
KAN Lei,ZHANG Yu-wen,FAN Hui,et al.Buoyancy driven underwater glider motion simulation[J].Computer Engineering and Application,2007,(18):99 -201.
[4]邬明,张宇文,张博,张纪华.浮力驱动式水下航行器设计参数分析[J].机械科学与技术,2010,(12):1655-1657.
WU Ming,ZHANG Yu-wen,ZHANG Bo,ZHANG Ji-hua.Analysison designing parameterofbuoyancy driven underwater vehicle[J]. Mechanical Science and Technology for Aerospace Engineering,2010,(12):1655 -1657.
[5]俞建成,张奇峰,吴利红,等.水下滑翔机器人运动调节机构设计与运动性能分析[J].机器人,2005,27(5):390-395.
YU Jian-cheng,ZHANG Qi-feng,WU Li-hong,et al.Movement mechanism design and motion performance analysis of an underwater glider[J].Robot,2005,27(5):390-395.
[6]张奇峰,俞建成,唐元贵,等.水下滑翔机器人运动分析与载体设计[J].海洋工程,2006,24(1):74 -78,85.
ZHANG Qi-feng,YU Jian-cheng,TANG Gui-yuan,et al.Motion analysis and body design of an underwater glider[J].The Ocean Engineering,2006,24(1):74 -78,85.
Research on buoyancy driven underwater glider attitude adjusting machine
WU Ming,SUN Shan-chun
(The 710 Research Institute of CSIC,Yichang 443003,China)
Buoyancy driven underwater glider has important application prospects in ocean exploitation and national defense.The article introduces mechanism of buoyancy driven underwater glider,according to one glider,specifically design the discreteness of roll and pitching to achieve attitude control,and put the structure position of the glider.Ultimately,computes the weight and hydrokinetic parameters of the glider,preliminary verify feasibility of total design scheme,is meet design requirement on most of design target.
buoyancy driven;glider;structural design;structural layout
TH134
B
1672-7649(2012)05-0058-04
10.3404/j.issn.1672-7649.2012.05.013
2011-08-26;
2011-09-19
邬明(1985-),男,工程师,主要从事水下滑翔机外形设计及流体力学研究。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:24:26
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:44
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:40
中学生数理化·八年级物理人教版(2022年5期)2022-06-05 06:57:36
北京航空航天大学学报(2021年4期)2021-11-24 01:13:12
知识就是力量(2019年7期)2019-07-01 17:33:03
军事文摘(2018年24期)2018-12-26 00:58:00
小学科学(学生版)(2018年12期)2018-12-19 05:13:46
少儿科学周刊·儿童版(2015年2期)2015-07-07 03:37:26
中国舰船研究(2014年6期)2014-05-14 06:45:27