
基于扰动压力与速度测量水中目标航向与航速的新方法
2012-07-12 05:56顾建农张志宏田雪冰
舰船科学技术 2012年5期
顾建农,张志宏,王 冲,缪 涛,田雪冰
(1.海军工程大学理学院,湖北 武汉 430033;2.中国人民解放军91439部队,辽宁 大连 116041)
基于扰动压力与速度测量水中目标航向与航速的新方法
顾建农1,张志宏1,王 冲1,缪 涛1,田雪冰2
(1.海军工程大学理学院,湖北 武汉 430033;2.中国人民解放军91439部队,辽宁 大连 116041)
从不可压理想定常流动的伯努利方程出发,依据水中航行体对水中某点的扰动压力与扰动速度的相关性,提出了基于水中航行体对水中一点的扰动压力与扰动速度测量该航行体的航行速度与航向的新方法。船模实验表明,该方法能较准确地测量出水中航行体的航向与运动速度,航向测量误差在5%以内,速度测量误差在20%以内,说明该方法具有实际应用前景。
航向测量;扰动压力;扰动速度;水中目标
0 引言
对水中运动目标的探测一直受到各国军事部门的重视。目前对水中航行体航速与航向被动测量的方法一般有基于运动目标自身噪声的声学测量方法[1-2]以及基于自身磁性的磁学测量方法[3-4]。而水中航行体航行时会对周围水体形成速度与压力扰动,这种扰动速度与压力的大小与航行体的运动速度、航行体的排水量、距航行体的距离等参数有着密切关系,目前已广泛使用的水压水雷引信就是利用水中航行体引起水底有规律的压力变化而设计的[5]。水中某一点的流体受到航行体的扰动而产生的速度与压力扰动的大小应包含了航行体速度大小的信息。本文从不可压理想定常流动的伯努利方程出发,依据水中航行体对水中某点的扰动压力与扰动速度的相关性,提出了基于水中航行体对水中一点的扰动压力与扰动速度测量该航行体的航行速度与航向的方法并进行了实验验证。
1 测量原理
设舰艇航行速度为V∞,相对地若舰艇不动则水流流动速度为V∞,建立如图1所示坐标系。设航行舰艇在水中某点形成的压力为p,扰动速度分量为ux,uy,uz。取水下同一水平面上2点A和B。A点由于远离舰艇,其扰动速度为0,压力为环境压力p∞;B点由于受到舰艇扰动其速度为(V∞+ux,uy,uz),压力为p。将流体当作理想流体考虑,对A和B两点列出伯努利方程有:

图1 舰艇及坐标系示意图Fig.1 The sketch of ship and coordinates
式中,ρ为水密度。
由式(1)可得B和A两点的压差为

由式(2)可得:

由于ux,uy,uz<<V∞,所以,由压力系数定义式


2 实验验证
2.1 实验设备与测量仪器
1)船池及船模
实验在海军工程大学可变水深拖曳船池进行(见图2)。该船池长38 m,宽4 m,水深0~2 m可变,拖车速度0~3 m/s。船模主要参数:水线长L=2.52 m,最大宽度B=0.25 m,平均吃水T=0.08 m,实验水深与船模水线长之比H/L=0.2,船模航行时的轴线位于船池中心面上。

图2 船池及船模Fig.2 The pool and ship model
2)压力传感器及点式流速仪
图3为船模、测压传感器及测速仪布置示意图。所采用的测压传感器为美国Honeywell公司生产的163PC01D75型微压差传感器,满量程为±63.5 mm水柱,线性误差在±1%以内,分辨率为0.04 mm水柱,图4为封装改造后可置于水下的压力传感器实物,该测量系统的详细情况见文献[6]。测压传感器的测压孔位于距船池中心面0.1倍船长的左侧池底处,用于测量船模通过传感器时产生的扰动压力。
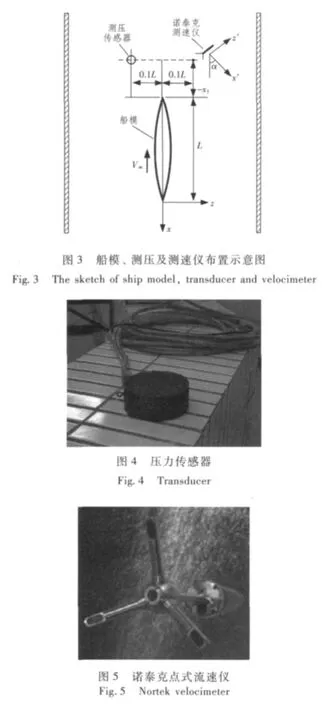
测速仪采用诺泰克公司生产的点式流速仪(见图5),它基于超声多普勒效应测量水中一点的扰动速度矢量,其量程范围为±0.01,0.1,0.3,1,2,4 m/s(可通过软件设定),测量精度为量程的±0.5%±1.0 mm/s。图3中x',y',z'(y'未画出,垂直纸面向里,与x',z'轴构成右手坐标系。)为超声测速仪坐标系,它能同时将水流速度的3个分量测量出来。x'轴与船模运动方向的逆向夹角为α,称之为船模相对于测速仪坐标系的航向角或测速仪相对于船模坐标系的偏置角。x,y,z为船模坐标系,其中y未画出,与y'方向一致。-x1表示船模驶向测量点时,头部距测量点连线的距离。由于测压传感器占据了船模左侧的位置,如果将测速仪也安排在左侧与测压传感器同点处,则测压传感器的壳体会对船模扰动速度的测量带来干扰。考虑到对称性,将测速仪置于船模的右侧,速度测量点与压力测量点相对于船模中心面左右对称。由于测速点处受到船模的压力扰动与测压点处受到船模的压力扰动相同,因此可以认为扰动压力与扰动速度是在同点测量的。
2.2 测量方法
设测速仪测量到水中某点扰动速度为(u'x,u'y,u'z),则根据2个坐标系的几何关系有


3 实验结果
图6为船模航行速度V∞=2 m/s,测速仪的偏置角α=0°时,船模通过测量点时测量到的扰动速度分量,图中横轴x1/L=-0.8表示船头距测量点连线0.8倍船长,x1/L=0.0表示船头恰好位于测量点的连线上,x1/L=2.2表示船尾距测量点连线1.2倍船长。图7为由测压与测速仪得到的压强系数比较。从图中可以看出,由速度分量按式(5)与式(6)计算得到的压力系数二者几乎一致,说明忽略速度扰动的高阶项计算压力系数是合理的。测压传感器的压力系数与由测速仪得到的压力系数也基本一致,说明将流体当作理想流体来处理扰动速度与扰动压力的关系也是合理的。二者的压力系数在最小处有一定的差别,误差的原因有:一是没有考虑流体粘性,采用伯努利方程将扰动速度与压力相关联会带来一定误差;二是测压传感器与测速仪自身的测量误差如测压传感器响应速度不够快,导致负压峰值测量不准。

图6 船模对测量点的扰动速度分量Fig.6 The disturbance velocity of ship model at the measurement point

图7 水中某点由测压与测速传感器得到的压强系数比较Fig.7 The comparison of pressure coefficient obtained by pressure and velocity transducer
表1给出了船模运动速度为1.556 m/s时,测速仪偏置角分别为 0°,30°,45°,60°时,由测量到的扰动压力与扰动速度根据前述公式推算出船模航速与航向角及其相对误差。从表中数据可以看出,推算出的船模航行速度与航向角与船模实际航行速度与航向角比较接近,说明用本文提出的方法确定水下航行体的航速与航向是可行的。本文虽只针对测速仪偏置角为0°,30°,45°,60°开展了实验测试工作,但考虑到对称性,当测速仪偏置角为90°~360°时情况应该会与表1中反映出的测量精度相似,正如表1中测速仪偏置角分别为30°与60°时推算出的结果基本一致一样。
4 结语
由理论推导及实验验证说明本文提出的基于水中航行体对水中一点的扰动压力与扰动速度同时测量该航行体的航行速度与航向的方法是有效可行的。这种测量方法不依赖于目标航行体的声、磁特性,对于具有隐身特性的水下航行体也能进行测量,表明该方法具有重要的实际应用前景。
本文只是针对提出的测量方法进行了初步的实验验证,测点位置距船模的正横距离仅为船长的0.1倍,如何在更远的测点距离下开展有效的测量以及在实际海况中有风、浪、流干扰的情况下进行航行体航向与航速的检测将是今后工作开展的重点。

?
[1]邓大新,林春生.基于声强矢量的舰艇目标运动参数估计[J].海军工程大学学报,2003,15(5):46-48.
DENG Da-xin,LIN Chun-sheng.Estimation of ship motion parameters based on acoustic intensity[J].Journal of Naval Unversity of Engineering,2003,15(5):46 -48.
[2]HASSAB J C,GUIMOND B W, NARDONE SC.Estimation of location and motion parameters of moving source observed from a linear array[J].Journal of the Acoustical Society of America,1981,70(4):1054 -1061.
[3]张朝阳,肖昌汉,阎辉.小波多尺度变换在水中磁性目标定位中的应用[J].测控技术,2008,27(11):86-90.
ZHANG Zhao-yang,XIAO Chang-han,YAN Hui.Applicati on for wavelet multi-resolution transform in the localization of underwater magnetic object[J].Journal of Measuring and Controlling Technology,2008,27(11):86-90.
[4]蒋伟涛,程锦房,李华.舰艇磁场与航向关系的实验分析[J].船海工程,2007,36(6):120-123.
JIANG Wei-tao,CHENG Jin-fang,LI Hua.Research of relationship between ship's magnetic field and it s course[J].Ship & Ocean Engineering,2007,36(6):120-123.
[5]叶平贤,龚沈光.舰艇物理场[M].北京:兵器工业出版社,1992.
YE Ping-xuan,GONG Shen-guang.The physics fields of ship[M].Beijing:Arms industry Press,1992.
[6]顾建农,张志宏,郑学龄.水压场信息处理系统[J].海军工程学院学报,1998,(1):39-43.
GU Jian-nong,ZHANG Zhi-hong,ZHENG Xue-ling.The message processing system of water pressure[J].Journal of Naval Unversity of Engineering,1998,(1):39 -43.
A new method of measuring underwater target heading and speed based on pressure and velocity disturbances
GU Jian-nong1,ZHANG Zhi-hong1,WANG Chong1,MIAO Tao1,TIAN Xue-bing2
(1.Science College,Naval Universityof Engineering,Wuhan 430033,China;2.No.91439 Unit of PLA,Dalian 116041,China)
A new method of measuring underwater target heading and speed based on its pressure and velocity disturbances is presented by the relative of the disturbances pressure and velocity of the underwater vehicle at a point in water from Bernoulli equation for incompressible steady frictionless streamline flow.The experiment of the ship model shows that the method can well and truly measure the underwater vehicle heading and speed,the error of the ship model's heading and speed is less than 5%and 20%.It shows the perspective of practical application in the future.
heading measurement;pressure disturbances;velocity disturbances;underwater target
O353.4
A
1672-7649(2012)05-0047-04
10.3404/j.issn.1672-7649.2012.05.010
2011-06-28;
2011-09-02
国防科技预研基金(51303030502)
顾建农(1963-),男,博士,教授,研究方向为舰艇目标特性及流体力学。
猜你喜欢
航空学报(2022年5期)2022-07-04
舰船科学技术(2022年10期)2022-06-17
新世纪智能(高一语文)(2021年3期)2021-07-16
模具制造(2019年10期)2020-01-06
科学导报·科学工程与电力(2019年5期)2019-10-20
民用飞机设计与研究(2019年4期)2019-05-21
海峡科技与产业(2017年3期)2017-04-13
电子制作(2017年24期)2017-02-02
舰船科学技术(2016年1期)2016-02-27
小学生时代·大嘴英语(2014年6期)2014-11-04
