
基于EMTDC/Pscad的同步电机建模仿真研究
2012-07-04 02:45邢剑王善铭钱珞江
船电技术 2012年11期
邢剑 王善铭 钱珞江
(1. 中国舰船研究设计中心,武汉 430064;2. 清华大学电机系,北京 100842;3. 武汉大学,武汉 430072)
0 引 言
在现代船舶直流电力系统中,带整流负载的多相同步发电机作为电源装置在系统中得到了越来越多的应用[1-3]。开展直流系统的仿真计算必然要涉及到多相同步电机的模型。
EMTDC/Pscad作为一个强大的电磁暂态计算仿真软件,在电力系统工程设计与仿真中得到了广泛的应用和认可。虽然EMTDC/Pscad电磁暂态计算仿真软件具有良好的人机界面和丰富的电气、控制元器件的通用模型库,对模型库中元器件简单组合可以搭建系统中绝大多数的模型,但是对于特殊模型例如多相同步电机的模型,仍然需要电力系统设计者根据软件的语法接口规则和电气设备的电磁原理进行程序代码的编制和模型的开发工作。
在以往的文献中,对于同步电机的建模方法和算法处理的描述不很明晰,给后来者在可操性上不能起到启示作用。多相同步电机与三相同步电机从原理上说并没有本质的区别,只不过存在定子相数的差别,表现在派克变换中电角度的不同[4-5],由于多相电机电磁参数的不易获取,因此本文将仅以通用的三相同步电机为实例,对建模方法和算法处理进行理论分析说明和推演,并对所提出的算法、接口处理方法与软件自带元器件库进行仿真比对并以验证建模方法的正确性。
1 同步电机数学模型解算方法
交流同步电机分为凸极电机和隐极电机两种结构形式,隐极电机实际上是凸极电机的特例,其直轴交轴的电抗相等,因此以凸极电机为原始模型,更加具有通用性。按照电机学原理,采用派克变换,将ABC的相坐标变换到dq0后,可以将含有时变系数的微分方程组改写成常系数的微分方程组,有利于计算处理。经过处理后最终得到以下电压电流的状态方程:

同步电机的数学模型实际上是一组常系数的微分方程组,对于此类微分方程的数值计算方法包括:欧拉法、梯形法、龙格-库塔方法等等。隐式梯形迭代法由于具有良好的收敛性,时间步长可以取得较小,计算的结果具有较高精度,计算的结果不容易发散。在 Pscad/Emtdc电磁暂态计算软件进行模型开发时,也采取相同的计算方法进行处理。
分析(1)式,可看出其实际上一组电阻电感R-L串联耦合支路,用单支路R-L梯形迭代法[2],将表达式改写成差分矩阵方程形式如下:
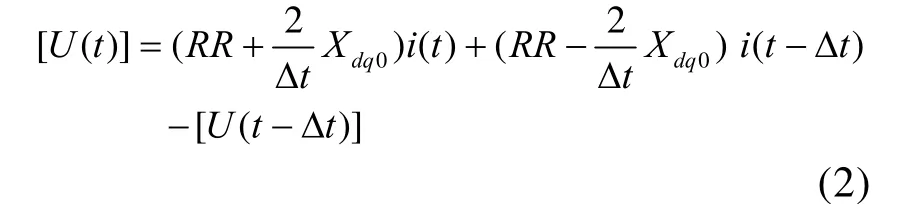
进一步按电机定、转子将AA和BB矩阵分解成如下子矩阵形式:

得到:

其中:

解转子方程得到:

代入定子方程得到:

2 电机数值模型及其EMTDC接口
在EMTDC/Pscad中,同步电机元件模型实际上是被处理成诺顿电流源注入到EMTDC整个解算网络中的, 其实现方式是利用机端电压作为边界条件来求出注入电流。图1表明了元件模型子程序以及与EMTDC主程序接口的处理流程。

图1 同步电机模型与EMTDC接口
在算法定子表达式(5)中,ABC三相支路之间互相耦合,而采用支路法来建模,是针对单支路实现的,因此须对电机耦合支路进行解藕,方法如下:设Rs={Rss-Rsr Rrr-1Rrs }=Rs1+ Rs2
其中Rs1为一个对角元素相等的对角矩阵,定子表达式改写如下:

这里第二项Rs2is(t),反映三相之间当前时刻的磁耦合变量,根据磁链不突变原理,可用 t-Δt 、t-2Δt、 t-3Δt三个时刻的历史值对is(t)进行预估,使之成为已知量,这样,它和其后的历史值一起构成已知数值的电压源Uhist,简写dq0坐标系的方程如下:

引入Park变换矩阵P,方程写为:

由此得出:

采用以上处理后,由于 Rs1为一个对角元素相等的对角阵,耦合的 ABC三条支路被分解成三条独立支路,由(6)式可分别定义三条支路上的电导(GEQ)和电压源(EBR ),就可以在EMTDC/Pscad中采用支路法进行接驳设计。
3 电机建模方法的仿真实例测试
根据(8)式采用Fortran完成三相同步电机元件模型解算子程序及其EMTDC接口机制的编制后,本文用标准实例对比法对所述建模方法进行了仿真验证。
仿真算例中用一台三相同步电机的参数建立了两个电机模型,其中一个采用本文所述方法(元件模型自定义方法)建模,所建模型为验证对象;另一个为 EMTDC元件模型库中的通用电机模型,所建模型作为参照标准。
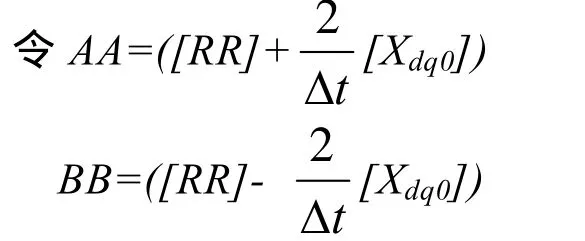
同步电机主要参数如下:
电机主要参数如下:
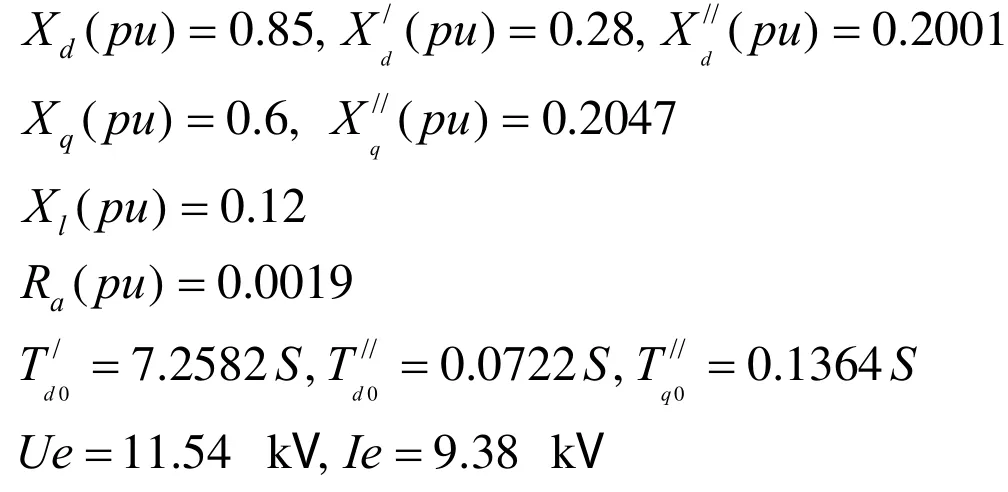
仿真算例模型及电路接线如图2所示。
在图2上方电路中包含的电机模型为自定义模型,下方电路中则为EMTDC通用电机模型。仿真试验工况为:电机在额定负载运行时发生机端三相短路,取动态过程中电机的定子绕组电流波形为测试量(Ia、Ib、Ic为自定义电机模型变量,Ia1、Ib1、Ic1为相应参照标准,EEa为自定义模块输出电压,EEa1为自定义模块输出电压),所得结果如图3所示。
图2 仿真算例

图3 短路电流的动态波形
结果显示,发电机模型短路试验波形存在偏差,经过比较,发现在短路时刻明显的缺少一个强制分量,进一步对自定义电机模型的励磁电流和阻尼绕组的电流进行输出,所得结果如图4所示:从图中可以看出,短路时刻,励磁绕组和阻尼绕组上出现了100 Hz的倍频交流量,这与电机学理论是违背的。理论上在短路时刻,励磁绕组和阻尼绕组上应该出现50 Hz的交流量。
4 步电机模型的改进以及验证
通过对出现问题仔细分析,认为主要是电机模型的耦合支路的解藕算法不正确,按照相关电力系统理论的依据,在表达式(5)将Rs处理成对角阵时,应该是对角元素不一致的,即零轴的阻抗是要保留的,再随后的park逆变换还原时,阻抗矩阵的非对角元素上是有一个阻抗值的,这样的话,实际上电路上也是没有解耦的,即在相间依然存在电磁耦合的关系,而在EMTDC软件中,若要采取支法的形式进行接口,则必须要将阻抗矩阵Rs处理成对角元素一致的形式,由此造成零轴无法还原,从而出现了波形错误。

图4 励磁绕组输出电流波形
若采用与网络取电压回电流的思路重新改写,即在程序流程上保持不变,在程序和接口方式上进行修改,采用不解藕的算法来还原注入电流。
重新将定子表达式(5)进行改写:
令 Rs={Rss-Rsr Rrr-1Rrs } ,余数项定义为
改用节点法注入电流源接口方式,将电机模型直接定义成一个完整的电气元件接驳到电网中,同时采取阻尼电阻并联电流源的形式克服模型数值振荡。将程序重新改写,重新运行,其短路前后时间段内局部放大,如图5所示。
从图中可看到,自定义电机模型中的三相电流波形基本一致。主要区别在相序上与 EMTDC参照模型不一致,这是由于两个电机模型的初始相位角(取决于Park变换矩阵P中的β0)不同所导致的。考虑到实际船舰直流电网中多相同步电机的运行方式是直接连于换流桥作为整流发电机电源,所以并不影响其在工程实用中的仿真效果。
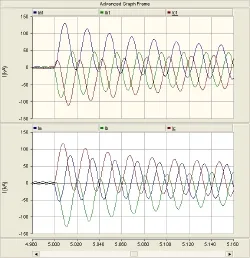
图5 短路电流波形的局部放大
5 结论
本文基于阻尼梯形叠代法推导出同步电机数值差分模型,并论证了其抑制数值振荡的有效性;同时对具有藕合电磁特性的同步电机采取无需解藕的节点法处理,解决了元件自定义模型与EMTDC电网络主程序接口问题。
通过三相同步电机实例模型的仿真测试,证明本文所述建模方法能够直接应用于建立多相同步电机的 EMTDC/Pscad仿真模型,在船舰电力系统的工程设计和科学研究中发挥重要作用。
[1]Williamson S. Fault tolerance in multiphase propulsion motors[J]. Journal of Marine Engineering and Technology,2004(4).
[2]Parsa l. On advantages of multi-p machines[C]//2005.Annual Conference of IEEE on Industrial Electronics Society, IEEE, 2005.
[3]杨金波, 杨贵杰, 李铁才. 双三相永磁同步电机的建模与矢量控制[J]. 电机与控制学报,2010,14(6):1-7.
[4]SINGH G K. Multi-phase induction machine drive reserch-a survey[J]. Electric Power Systems Research,2003,62 : 139-147.
[5]Martin J-P. Multiple-phase permanent magnet synchronous machine supplied by VSIs,working under fault conditions[C]. IEEE, 2000, (3)1710-1717.
猜你喜欢
西安石油大学学报(自然科学版)(2022年5期)2022-10-08
防爆电机(2020年6期)2020-12-14
数学年刊A辑(中文版)(2018年4期)2019-01-08
光学精密工程(2016年3期)2016-11-07
电信科学(2016年9期)2016-06-15
电测与仪表(2016年13期)2016-04-11
大电机技术(2015年5期)2015-02-27
电工技术学报(2014年7期)2014-11-15
组合机床与自动化加工技术(2014年12期)2014-03-01
文山学院学报(2012年6期)2012-03-25
