航天器交会对接激光雷达成像技术
2012-06-23 06:42:58易予生陈晓光
电子科技 2012年10期
易予生,陈晓光,刘 超
(中国空间技术研究院载人航天总体部,北京 100094)
空间交会对接测量技术主要是对两个或多个航天器在交会对接时的相对轨道位置、速度和姿态角等参数进行测量,是空间补给、空间组装及空间救援等任务的核心支撑技术,也是国内载人航天工程第二步战略的关键技术。随着载人航天技术逐步成熟和空间站的发展,永久性国际空间站(ISS)长期建设,这都需要空间交会对接技术。因此,随着人类空间活动范围的不断扩大,空间交会对接技术将会发挥重要作用。
到目前为止,以苏、美为代表的航天大国在不断地研究空间交会对接新的测量方法,各种先进的测量传感器不断地被提出并设计出来,交会微波雷达,绝对GPS与相对(差分)GPS测量,激光雷达在不同的交会对接任务或试验中不断得到应用。激光雷达由于激光本身的波束窄、相干性好、工作频率高等优点,能在交会阶段直到对接的整个过程中提供高精度的相对距离、速度、角度和角速度的精确测量,能够获取目标飞行器的三维图像,可辅助航天员完成手动交会对接,从而为交会对接提供了一种手段[1-5]。
针对交会对接的任务特点,借鉴国际上先进激光雷达发展趋势,文中提出了基于脉冲测距方法的激光雷达成像方案,并对交会对接过程中交会对接面成像进行了仿真验证。
1 激光器选择
目前常用的激光成像雷达有二氧化碳成像激光雷达和二极管泵浦固体式成像激光雷达。CO2气体激光器是一种典型的分子气体激光器。其利用CO2分子的振动和转动能级间的跃迁来产生激光的,激光的波长为10.6 μm。优点是:(1)对人眼安全。(2)传输性能好。(3)有较大的传输功率和能量转换效率。缺点是:需要低温制冷,并需要设计特别的前置放大器,以适应接收探测器的低噪声,增加了成本、体积和重量。固体激光器以其高可靠性、技术成熟等优点在激光成像领域中得到了广泛发展。其中,二极管泵浦YAG激光器成为一个重要的发展方向。二极管泵浦YAG激光器具有输出功率高、寿命长的优点,并且泵浦的效率高,可达20%左右,体积小,重量轻,适于小型化应用。其不足之处在于结构复杂,成本较高[6]。
结合液体激光器和固体激光器的特点,针对载人航天器交会对接任务的特点和需要,以及空间环境的限制,激光设备应尽可能的做到体积小,重量轻。因此,文中激光器选择二极管泵浦固体式 YAG激光器。
2 测距原理
激光测距是激光雷达三维成像的基础,目前常用的测距方法有脉冲法、相位法、干涉法和三角法等[7-8]。文中采用脉冲法进行激光雷达测距。脉冲激光测距是利用激光传播往返时间差的测量来完成的。脉冲激光测距原理是用脉冲激光器向目标发射一列较窄的光脉冲(脉冲宽度小于50 ns),光达到目标表面后部分被反射,通过测量光脉冲从发射到返回接收机的时间τ,可算出雷达与目标之间的距离L。即

3 扫描方式
激光成像雷达利用激光束对前方的视场空间进行扫描,因为激光的波长较短,在目标平面上表现为一个极小的光斑,为达到对前方视场空间进行细节性扫描,选用扫描方式十分重要。一般地,激光成像雷达系统采用的扫描方式有正弦扫描、光栅扫描、逐列扫描等方式。在文中采用逐列扫描方式,如图1所示。
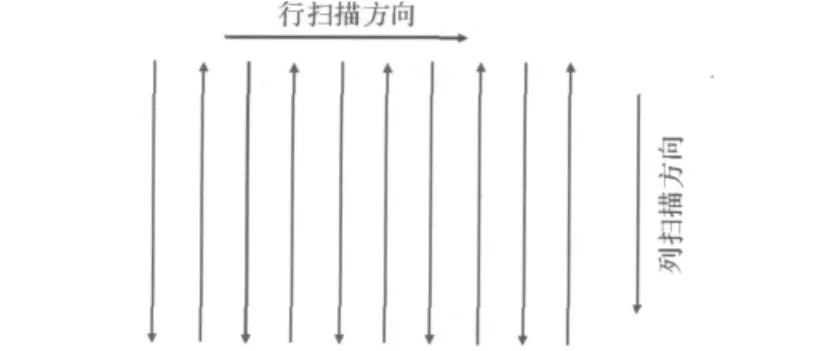
图1 激光扫描方式
在激光扫描反射成像系统中,激光波长λ、扫描方向上有效扫描孔径D决定了激光衍射极限光束角的大小

式中,α为比例系数,通常取1。
一般情况下,成像系统通过增大光学系统口径的方法提高成像角分辨率,在感光元件的像素分辨率一定时,通过加长焦距提高成像分辨率。
为获得足够强度的信号回波和便于后续的信号处理,扫描激光束必须在每一探测单元上停留足够长时间。对于脉冲激光雷达,其最大测量距离Rmax决定了脉冲重复频率fr的最大值

式中,c是光速。
4 激光雷达系统的构像方程
构像方程是指目标点在激光雷达系统中的坐标(x,yz)和其在地面对应点的大地坐标(X,Y,Z)之间的数学关系。根据摄影定理的基本原理,这两个对应点应和传感器的投影中心点呈共线关系,可以用共线方程来描述。
为建立图像点与目标点之间的数学关系模型,需要在像方和目标方定义坐标系,如下图2所示。
传感器坐标系:原点OS:扫描器激光发射中心,U轴:平台飞行方向,V轴:与XYZ-O构成右手三维坐标系,W轴:指向天顶方向。
地面坐标系:原点O:地球质心,X轴:指向本初子午线与地球的交点,Y轴:与XYZ-O构成右手三维坐标系,Z轴:指向真北极。

图2 像方和目标方坐标系
设目标点P的地面坐标为(X,Y,Z)P,P在传感器坐标系中的坐标为(U,V,W)P,投影中心S在地面坐标系中的坐标为(XS,YS,ZS),传感器的姿态角为(φ,ω,κ),则通用构像方程为
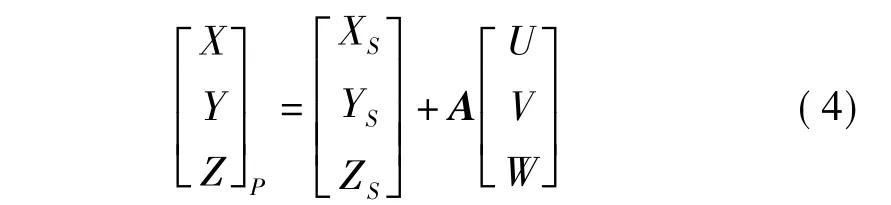
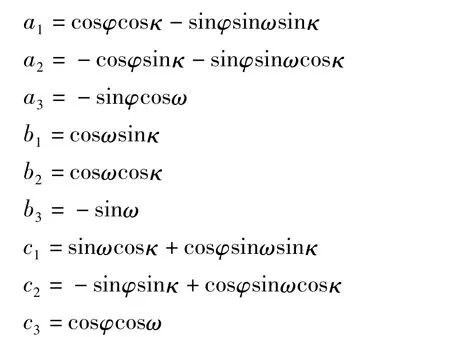
在此系统中,外方位元素为(XS,YS,ZS,φ,ω,κ),起点OS为遥感器主光学系统的投影中心,其坐标(XS,YS,ZS)可利用动态差分GPS给出:向量S的模S可用激光测距仪测量投影中心到地面待定点的距离得到;姿态参数(φ,ω,κ)分别表示俯仰角、侧滚角和偏航角,可利用高精度姿态测量装置进行测量;扫描线方向与Z轴夹角θ由编码器按固定的激光脉冲间隔给出。对于每一个脉冲有:X=0,Y=sinθ,Z=Scosθ。代入构像方程,即有
下图3为交会对接时目标飞行器和飞船的几何示意图。其中3为激光雷达,6为2#合作目标安装面。

图3 交会对接时目标飞行器和飞船几何示意图
根据提出的成像方案,激光器对目标区域进行X方向和Y方向二维波束扫描;进行过门限检测,获得强散射点的X方向角度θ和Y方向角度φ。根据几何关系,计算散射点水平坐标和高度坐标,即获得地面三维立体图像。
5 仿真验证
为了验证上述算法的可行性,首先对一平面进行成像仿真。该平面由的点阵组成,高度均为0 m。设光学系统的波长为1550 nm,有效口径20 cm,带宽取为工作频率的3%~10%。
图4为采用文中方法的成像结果。其中,图4(a)为仿真得到的原始图像,图4(b)为仿真成像结果。由图4(a),图4(b)可看出,采用文中方法得到的成像结果与原始图像一致。平面中间区域成像效果较好,边缘部分精度变差。但在图像边缘测得的最大误差也仅为0.01 m。
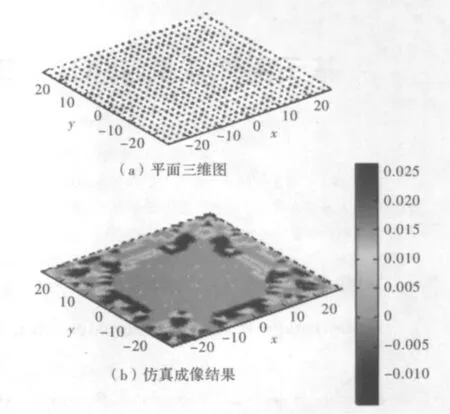
图4 平面地形成像仿真结果
为进一步验证文中算法的有效性,作为对比,图5(a)给出了一随机起伏的场景,该场景同样由的点阵组成,其他参数同上。图5(b)为成像结果。由仿真结果可见,成像结果与仿真原始地形一致。
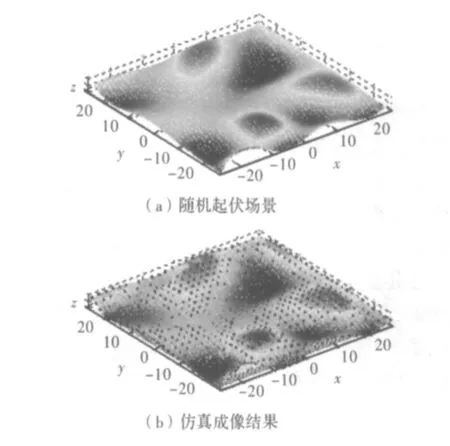
图5 随机起伏场景成像仿真结果
6 结束语
针对交会对接任务的需要,文中提出了基于脉冲测距方法的激光雷达三维成像方法。首先根据交会对接任务的特点,对激光器进行了对比和选择,通过采用逐点扫描的方法测量每个散射点的距离,通过构像方程得到了真个场景的图像。通过该方法对平面场景和随机起伏场景进行了成像仿真,仿真结果与设定的场景一致,验证了该校正方法的有效性和正确性,从而为国内交会对接提供了参考。
[1]DURAND Y,MEYNART R A C,MORAN A D,et al.Results of the pre-development of ALADIN[C].The Direct Detection Doppler Wind Lidar for ADM/AEOLUS,SPIE,2004.
[2]DAVID M W,WILLIAM H,CHRIS H.Status and performance of the CALIOP LIDAR [C].The Direct Detection Doppler Wind Lidar for ADM/AEOLUS,SPIE,2004.
[3]DURAND Y,MEYNART R,ENDEMANN M,et al.Manufacturing of an airborne demonstrator of ALADIN[C].The Direct Detection Doppler Wind Lidar for ADM/AEOLUS,SPIE,2005.
[4]刘燕京.关于新一代激光雷达系统[J].测绘科学,2003(1):59-60.
[5]倪树新,李一飞.军用激光雷达的发展趋势[J].红外与激光工程,2003(2):111-114.
[6]李朴莲.三维成像激光雷达技术最新发展与展望[J].国防技术基础,2003(1):40-41.
[7]张云,吴谨,唐永新.合成孔径激光雷达[J].激光与光电子学进展,2005(7):48-50.
[8]倪树新.新体制成像激光雷达发展评述[J].激光与红外,2006(9):732-736.
猜你喜欢
纺织科学研究(2023年9期)2023-10-23 11:18:06
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
当代水产(2019年1期)2019-05-16 02:41:10
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
电子制作(2018年9期)2018-08-04 03:30:54
长春理工大学学报(自然科学版)(2018年2期)2018-05-26 01:49:37
中国设备工程(2017年24期)2017-12-28 07:40:14
中国光学(2016年2期)2016-11-09 12:11:50