大型风电机组变速变桨距协调控制技术研究
2012-06-21 08:33:16徐浩夏安俊胡书举赵斌
电气传动 2012年6期
徐浩,夏安俊,胡书举,赵斌
(1.中国科学院 风能利用重点实验室,北京100190;2.中国科学院 电工研究所,北京100190;3.中国科学院 研究生院,北京100049)
1 引言
变速变桨距风力发电机组是风力发电技术发展的主流方向,能够确保风电机组在风速较小时通过调节发电机转速,可以使转速跟随风速,提高风能利用效率,实现最大风能捕获;在风速较大时,通过调节叶片桨距角限制风力机的能量输入,从而控制发电机输出功率平稳,提高风力机组启动性能与制动性能,减小桨叶受力不平衡,抑制塔架振动,降低机组结构载荷,提高机组的柔性度等。控制系统是机组的关键部件之一,控制系统的性能优劣对风机运行的效率和使用寿命有至关重要的影响[1-2]。
在额定风速以上,控制的首要目的是使发电机输出功率保持在额定值,减小输出功率的波动,同时还要保证电磁转矩、气动转矩、风力机转速和发电机转速不超过其极限值,另一个控制目标是减小静态和动态载荷。早期的变速恒频风电机组在额定风速以上采用单独变桨距控制,由于变桨距系统的响应速度受到限制,对快速变化的风速,通过改变桨距角来控制输出功率的效果并不理想。在风速快速增加时,容易由于关桨不及时引起机组超速。而在风速突然下降时,又往往因为转速的大幅下降引起功率的凹陷[3-5]。
发电机转矩控制响应速度很快,但是当其应用在控制功率和速度时,系统的稳定性得不到保障。当两种控制方法协调控制时,可以保证输出功率平稳,并且在保证系统稳定性的同时提高了系统的暂态响应速度[6]。文献[7-8]引入转矩PI闭环实现了变速运行和变桨运行的平滑过渡,文献[9]中也提出在额定风速以上,采用“纹波转矩”方式加大传动链阻尼可以降低机组的结构疲劳载荷。但这些方法对于功率和转速的波动抑制并不明显。
本文首先简要分析了变速变桨距风电机组的分区域运行策略,在欠负荷运行区域,通过引入变桨加速度控制器,在不影响发电量的同时有效避免了阵风时的超速情况;在满负荷运行区域,引入了基于转矩和功率的混合控制算法,保证了机组的转速和功率的平滑性。同时借助Bladed软件和现场试验验证了控制策略的有效性。
2 控制策略
2.1 分区域控制原理
变速变桨距风力发电机组根据输出功率的大小可分为3种运行状态,即风力发电机组的启动状态、欠负荷区和满负荷区。图1为变速变桨距机组运行状态示意图。
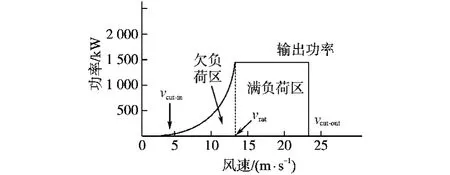
图1 变速变桨距机组运行状态Fig.1 The operational state of variable speed variable pitch wind turbine generation
欠负荷运行区和满负荷运行区域采用的是PI控制策略[7-10]。
转矩PI控制器
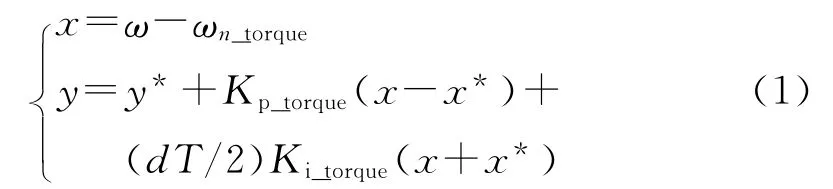
式中:Kp_torque为比例系数;Ki_torque为积分系数;dT为扫描周期;ω为发电机侧转速;ωn_torque为发电机侧给定转速;*表示上一拍的值;y为转矩给定值。
变桨PI控制器
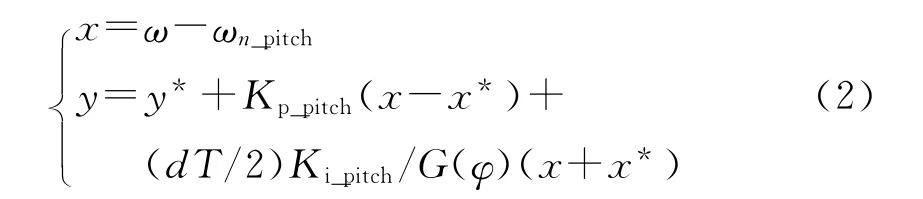
式中:Kp_pitch为 比 例 系 数;Ki_pitch为 积 分 系 数;dT为扫描周期;ω为发电机侧转速;ωn_pitch为发电机侧给定转速;φ为桨距角实际值;*表示上一拍的值;G为变桨非线性系数;y为桨距角给定值。
控制框图如图2所示。
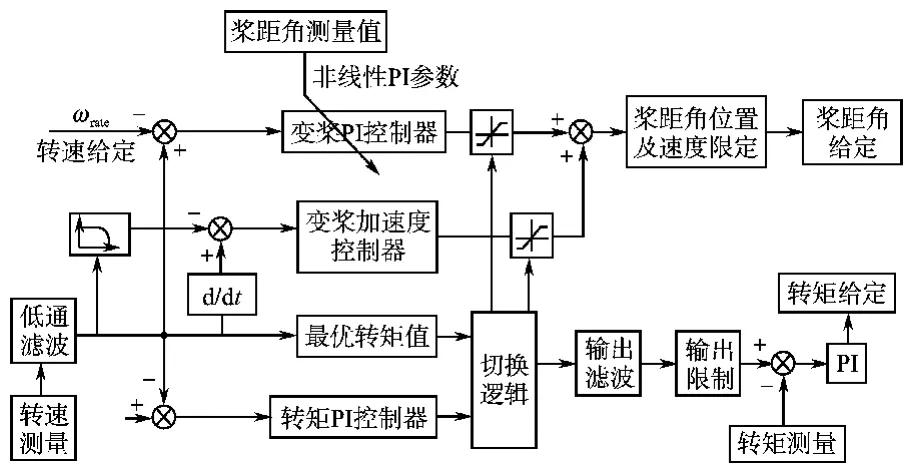
图2 变速变桨距协调控制策略框图Fig.2 Block diagram of variable speed variable pitch control strategy
2.2 欠负荷区域协调控制策略
2.2.1 最优桨距角的选择
欠负荷时桨距和转矩控制目标:为了获得最大功率,电磁转矩设定在能获得最佳叶尖速比的值,而桨距角设定在可以获得最大升力的角度。
根据叶片设计及叶片厂家提供的参数可以通过查表的方法得到不同风速条件下的最优桨距角,但是由于风速不容易准确测得,由于叶轮转速可以间接反应风速的大小,故根据叶轮转速来选取最优桨距角。
对于额定功率以下时,桨距角设定的参考值的依据为转速,桨距角的设定值预先存在转速和桨距角关系表格中,为了达到更精确的桨距角设定值可以采用线性插值的方法。未达到额定功率时的变桨控制框图如图3所示。

图3 欠负荷区的最佳桨距角控制方法Fig.3 Optimal pitch control in partial load area
根据叶轮转速通过查表的方式得到当前风速下的最佳桨距角,这个最佳桨距角作为给定值与实际的桨距角的偏差经过PI调节器并限幅得到变桨速度的给定值,通过变桨执行机构得到了实际的桨距角值。
2.2.2 变桨加速度控制器
风速在额定风速附近波动时,由于变桨控制和转矩控制都是将转速维持在额定点处,如控制不当容易引起机组的振荡。因此需要在额定点附近实现二者间解耦,采用一些逻辑开关保证只有一个控制器激活,这种逻辑看来简单易实现,但有时会出现不符合逻辑情况,比如,风速在额定风速之下时上升很快,这时如果在转矩达到额定之前进行一些变桨调节会很有效,否则会引起额定转矩之上的超速。一种方法是采取其中一个控制器饱和状态,另一个控制器激活有效的方法使2个控制器同时运行,远低于或远高于额定风速时,此方法有效,接近额定点时,2个控制器会出现相互干扰[7]。另一种方法是在速度偏差环外增加转矩偏差控制信号,共同作为变桨PI控制器的输入,额定风速之上,转矩给定为额定转矩,转速偏差信号为0,额定风速之下,转矩偏差信号为负,控制器会使桨距角向较小角度动作并阻止额定风速下变桨调节器动作,如果风速变化快速,在转矩达到额定转矩之前,控制器也会提前驱动变距动作,有效防止超速。但是由于转矩的波动量较大,引入转距误差后容易引起变桨执行机构动作频繁,不利于机组的稳定。
变桨加速度控制器采用了一个发电机加速度的控制,控制输出y(k)与变桨PI控制器的输出相加形成控制量,经过限幅以后得到桨距角的给定值。变桨加速度控制策略框图如图4所示。
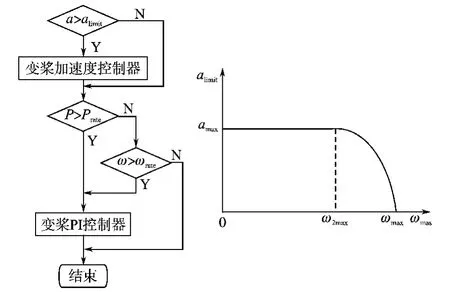
图4 变桨加速度控制策略框图Fig.4 Pitch control strategy block diagram which control accelerate speed
即使发电机输出功率在额定值以下,如果风力机的旋转加速度超过限定值或速度达到额定值变桨控制器都将被启动。当加速度超限时,通过变桨加速度控制器抑制加速度的继续增大;如果速度达到额定值,则通过变桨PI控制器抑制速度的继续增大;当功率达到额定值以后,与传统的控制方法一样,通过变桨控制维持功率恒定。为了实现协调控制,当加速度超限时,采用了比例调节器对桨距角进行调节。不同转速下的加速度限定值如图4所示,在转速较低时加速度的限定值为机组机械结构允许的最大加速度,速度接近最大时,加速度的限定值逐渐减小到0。
2.3 满负荷区的协调控制策略
满负荷区主要依靠变桨距控制来限制风力机吸收的风能,从而限制风力机转速,同时协调控制发电机电磁转矩将风电机组转速及系统输出功率维持在额定值。
应用合适的转矩控制算法可以减小转速和功率的波动,满负荷区的转矩-转速曲线应在图5所示的阴影区域内,因为在阴影之外,功率(或转矩)范围增大并且转矩(功率)并没有得到很好的控制[5]。
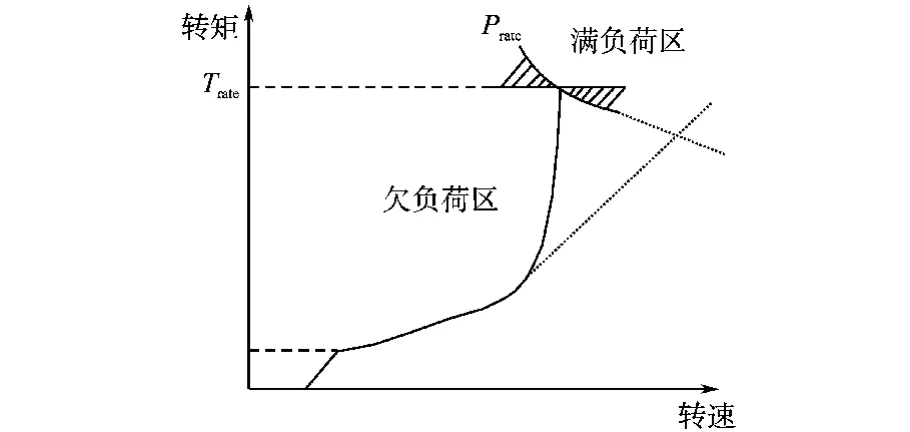
图5 满负荷区转矩-转速曲线的最优区域Fig.5 Optimization area around rated conditions of torque-speed curves
图6给出了满负荷区3种可能的转矩控制曲线——恒转矩控制、恒功率控制和混合控制,3种控制算法期望的发电机转速都为额定转速。功率和转矩允许的最大值由风力机本身和变桨控制算法决定。
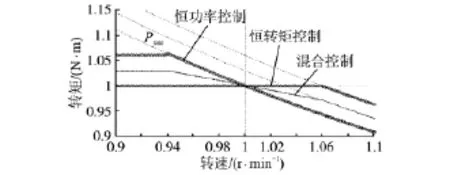
图6 满负荷区转矩控制曲线Fig.6 Torque control in full load area
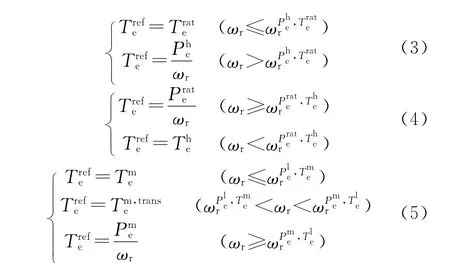
恒转矩控制的转矩给定、恒功率控制的转矩给定及混合控制的转矩给定如下式所示:
3 仿真结果与分析
本文借助GH Bladed3.81软件对某1.5MW双馈型风力发电机组模型进行仿真计算[11-12],机组参数为:额定功率1.5MW,风轮直径70.48m,风轮转速10~19r/min,叶片数3,额定风速11.5 m/s,齿轮箱变比94.74,发电机同步转速1 500 r/min,发电机额定转速1 800r/min,发电机额定转矩8 400N·m,风轮转动惯量6.2e5kg·m2,发电机的转动惯量58.7kg·m2,低速轴的等效刚度8.4e7 N·m/rad,低速轴的等效阻尼6.7e5N·m·s/rad。
3.1 阶跃风况下仿真验证

图7 阶跃风况下仿真结果Fig.7 Simulation results at step wind speed level
图7表示阶跃风况下的仿真波形。在20s时,风速突然由8m/s增加到15m/s。从转速曲线上看,两种控制方式下转速在33s后基本达到稳定,未采用加速度控制器时转速最大值为1 847.27 r/min,而采用加速度控制后转速最大值为1 801.09 r/min;从桨距角曲线上看,两者的波形变化趋势基本一致,但采用加速度控制时桨距角提前动作约0.5 s;从功率曲线上看,两者波形基本一致。
3.2 3D湍流风况下仿真验证
1)额定风速附近。图8表示平均风速12m/s时600s的仿真波形,此时平均功率1 286.98kW(85.8%额定功率)。显然,这个值明显低于额定功率,这是由于在相当长的时间里风速低于额定值,此时桨角设定在最优桨角处,电磁转矩按最佳叶尖速比给定。一旦风速高于额定值,混合控制模式将开始作用。转速最大值是1 845.23r/min,超调量为2.51%,平均转速为1 770.34r/min(98.4%)。
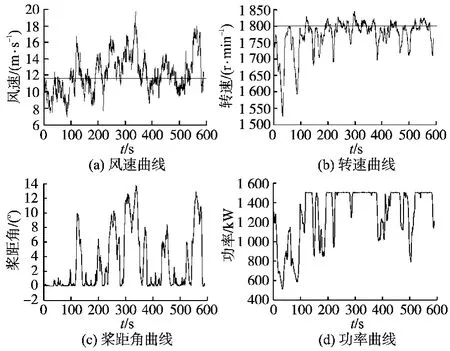
图8 额定风速下仿真结果Fig.8 Simulation results at rated wind speed level
图9 额定风速以上仿真波形Fig.9 Simulation results above rated wind speed level
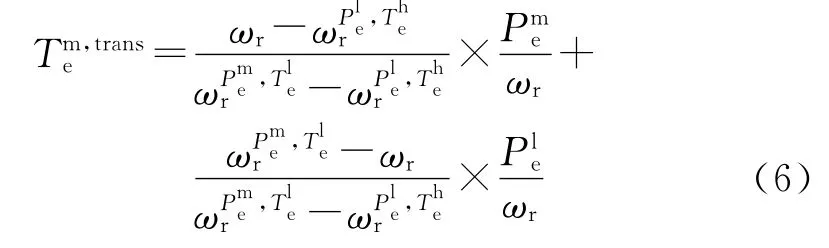
2)额定风速以上。图9表示平均风速为16m/s时600s的仿真波形,此时平均功率1 500.74 kW。输出功率基本在额定功率附近波动,在80s附近,功率曲线出现凹陷,这是因为风速突然下降到额定风速以下并维持一段时间。最大的阵风出现在470s,转速最大值为1 871.05r/min,超调量为3.95%。
3)远高于额定风速。图10表示平均风速为20 m/s时600s的仿真波形,此时功率的最小值和最大值分别是1 458.11kW,1 517.14kW,功率的波动范围在±3%以内;转速的最大值是1 898.23 r/min,超调量5.46%。仿真结果表明:当风速始终在额定风速以上时,混合控制模式下功率和转速的波动都在允许范围以内,即使在大阵风条件下,也没有出现过速或过功率的现象。
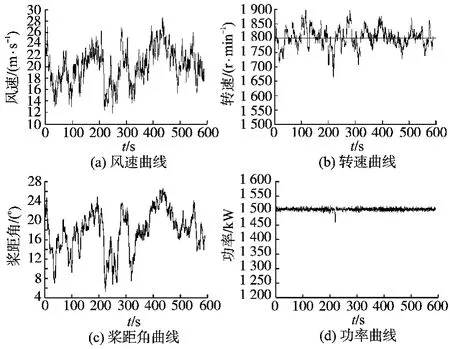
图10 远高于额定风速仿真波形Fig.10 Simulation results at high wind speed level
4 实验验证
控制算法在某风电场实际运行的机组上进行了实验验证,结果如图11所示。
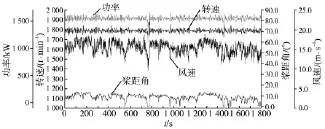
图11 现场实验结果Fig.11 Results of field experiment
图11给出了不同时刻发电功率、测量转速、测量风速和桨距角测量值。从图11中可以看出:风速在15m/s左右波动时,发电机输出功率和运行转速都较为平稳,机组稳定性较好,达到了预期的效果。
5 结论
变速变桨距协调控制可以优化输出功率曲线,并且提高系统的暂态响应速度。在欠负荷区引入变桨加速度控制器,仿真结果表明:在不影响发电量的同时,通过提前变桨有效地改善了机组的超速现象。在满负荷区引入了转矩-功率混合控制方式,仿真结果表明:机组在额定风速、额定风速以上和远高于额定风速运行时,转速和功率波动比较平滑,稳定性良好。最后,通过对控制算法的现场验证,取得了较为理想的效果。
[1]Pao L Y,Kathryn E,Johnson A.Tutorial on the Dynamics and Control of Wind Turbines and Wind Farms[C]∥Proc.,Amer.,Ctrl.,Conf.,2009:2076-2089.
[2]叶杭冶.风力发电机组的控制技术[M].第2版.北京:机械工业出版社,2002.
[3]马蕊,鄂春良,付勋波,等.兆瓦级变速恒频风电机组变速变桨距控制技术研究[J].电气传动,2010,40(4):7-10.
[4]刑作霞.大型变速变距风力发电机组的柔性协调控制技术研究[D].北京:北京交通大学,2008.
[5]vanderHooft E L,Schaak P,van Engelen T G.Wind Turbine Control Algorithms[R].Holland:Dutch Ministry of Economic Affairs,2003.
[6]Bianchi F D,Manta R J,Christiansen C F.Power Regulation in Pitch-controlled Variable-speed WECS above Rated Wind Speed[J].Renewable Energy,2004(29):1911-1922.
[7]Bossanyi E A.The Design of Closed Loop Controllers for Wind Turbines[J].Wind Energy,2000,3(3):149-163.
[8]俞斌,屈虎,杜煜,等.一种兆瓦级风力发电机组联合控制策略:中国,101660489A[P].2010-03-03.
[9]林志明,潘东浩,王贵子,等.双馈式变速变桨风力发电机组的转矩控制[J].中国电机工程学报,2009,29(32):118-124.
[10]Jelavi′c M,Peri′c N.Wind Turbine Control for Highly Turbulent Winds[J].Automatika:Journal for Control,Measurement,Electronics,Computing and Communications,2009,50(3-4):135-151.
[11]Bossanyi E A.GH Bladed User Manual[R].Bristol:Garrad Hassan and Partners Limited,2009.
[12]Bossanyi E A.GH Bladed Theory Manual[R].Bristol:Garrad Hassan and Partners Limited,2008.
猜你喜欢
电力科学与工程(2022年9期)2022-10-10 03:20:36
电力建设(2022年7期)2022-07-04 02:50:50
东方汽轮机(2020年3期)2020-11-04 11:07:34
大电机技术(2018年4期)2018-09-26 03:11:38
通信电源技术(2016年1期)2016-04-16 04:57:28
电源技术(2016年2期)2016-02-27 09:05:15
电测与仪表(2015年21期)2015-04-09 11:52:16
电测与仪表(2015年11期)2015-04-09 11:46:14
电机与控制应用(2015年3期)2015-03-01 03:49:52
电气传动自动化(2014年6期)2014-03-20 13:36:22