
智能雨滴传感系统设计
2012-06-17 05:55唐思炜侯书勇
常熟理工学院学报 2012年2期
唐思炜,侯书勇
(华东理工大学 理学院,上海 2 00237)
雨滴传感器大多应用于汽车自动雨刮.现有的雨滴传感器主要有三种类型:静电容式,以两块极板作为传感器,当有雨进入极板中间时,电容值会随雨量的大小改变,从而判断雨量;压电振子式,以压电元件作为传感器,随着雨量的变化,压电材料会输出不同的振动波形,从而判断雨量;红外线式,利用光的全反射原理,当传感元件接触到雨后,由于介质折射率的不同,光线会发生全反射,根据光线全反射的强度判断雨量大小[1].这些传感器只有在雨量较大时,才能判断雨量的大小,当雨量较小时,很难作出灵敏的反应.因此,本文拟对现有传感器进行改进,以提高传感器的灵敏度.
1 雨滴传感器原理
1.1 平行玻璃结构和理想雨滴模型
一束光线入射到平板玻璃后分为三段:L1为入射光,L2为折射光,L3为出射光.设滴落到平板玻璃上的理想雨滴(形状为半椭圆)只有一滴,如图1所示,在L1处安置激光信号发射器,在L3处安置光敏电阻.根据折射定律,无雨时,入射光L1和出射光L3是平行的.那么光敏电阻将接收到光信号,判断为无雨.
由于玻璃折射率>雨水折射率>空气折射率,当理想雨滴滴落在玻璃上,由于理想雨滴为半椭圆形,光线相对于雨滴的入射面和出射面是不平行的,则获得的出射光L3与入射光L1一定不平行,出射光L3发生偏转,光敏电阻无法接收到光信号,判断为有雨.
1.2 传感器改进——V形槽雨滴传感器
在平行玻璃结构中,若雨量稍大,平板上雨水偏离理想雨滴较大,而近似为液体平板.此时光线产生的偏折角度Δ θ十分微小,其在光敏元件上的偏移量为

其中R为出射光L3的光程,要使Δ L偏移出光敏元件,就需要光程R足够大.而传感器距离的增加,会造成许多误差的产生和扩大,故在实际应用中,具有一定的局限性.因此,我们需要对传感器进行一定的改进,减少由于雨滴形状的不同而造成的误差.
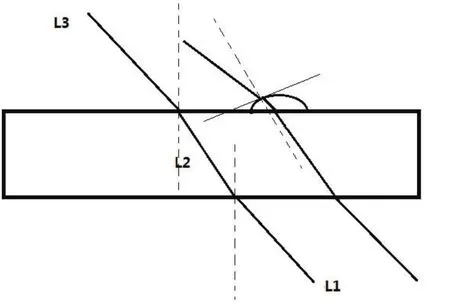
图1 平行玻璃结构雨滴示意图
我们在原有的平行玻璃结构上,开一个V形槽,如图2、3所示.雨滴落在槽内后,其上表面近似于水平状态,而下表面由于V形槽的限制,与水平面有很大的夹角.事先调整入射光L1,使其穿过V形槽斜面,从上表面射出,由于上下表面的斜率完全不同,因此出射光L3会产生一个较大角度的偏转,使出射光L3偏离出光敏元件的接受范围,光敏电阻无法接受到光信号,判断为有雨.
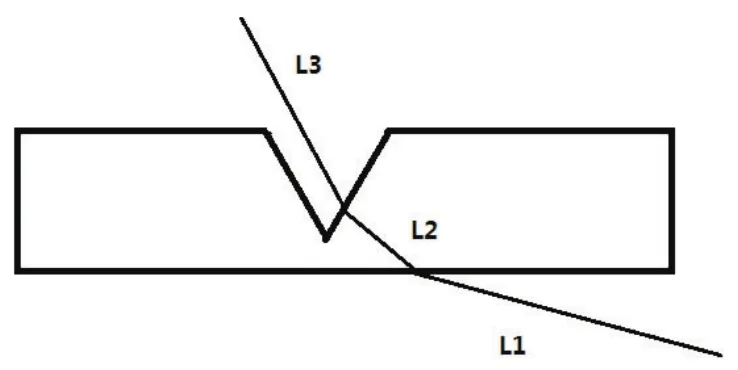
图2 V型槽无雨示意图

图3 V型槽有雨示意图
1.3 V形槽雨滴传感器的偏转角
我们定义V形槽和玻璃面法线的夹角为θ1,出射光与水平面的夹角为θ2.为了便于计算,我们调整入射光的角度,使其垂直于V形槽的斜边入射,如图4所示.这样我们可以计算得出无雨时光线的偏折角度为0,而有雨时,光线的偏折角度为

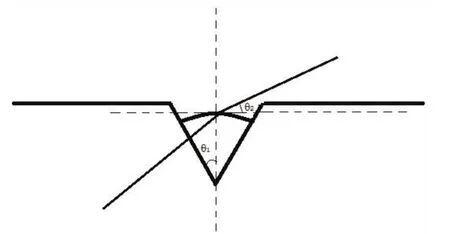
图4 偏折角度曲线
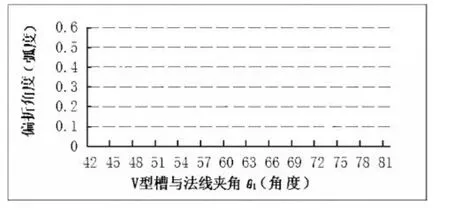
图5 偏折角度曲线
其中n代表折射率.为了便于计算,我们根据实际情况作一些近似.空气的折射率n空约为1.雨水因所含成分的复杂,没有经过实际测量,近似采用水的折射率n水为1.33.代入(2)计算得到出射光的偏折角度曲线如图5所示.
根据公式(1)可知,在光程固定的情况下,光线在光敏元件上的偏折距离仅与偏折角度(即偏转弧度)有关,并且成线性关系.试验中,光线仅需偏折0.5~1 cm,就可对雨滴进行判断,而光程一般为5~10 cm以上.因此,偏转弧度只需达到0.1即可.即θ1在42°~73°,都能对雨滴进行判断.允许雨滴表面倾斜误差15.5°.
2 传感器控制电路设计
由于传感器在无雨时,光敏电阻能够接受到光信号,而有雨时接收不到光信号.据实验测定,两者的阻抗差在6~10倍左右.因此,根据光敏电阻输出阻抗的不同,设计如图6所示电路.为方便测试,实验中将电路连通一个电机.通过电机正反转,判断有无雨.
图6中,R6、R7为光敏电阻(光敏电阻受光照之后阻抗降低),阻值为12 K.D1、D2为MCR系列可控硅,实验中选用的是MCR100-6(当触发电压大于额定电压时,可控硅导通;触发电压小于额定电压时,可控硅截止[2-3])控制电路的导通与截止.当光同时照射到R6、R7上时,D1、D2触发端电压分别降低和升高,使得D1截止,D2导通.电机正转,判断无雨.当没有光照射到R6、R7上时,D1、D2的触发端电压分别升高和降低,使得D1导通,D2截止,电机反转,判断有雨.

图6 DC24V电极正反转控制器接线示意图(手动自动行程开关限位端子型)
3 实验结果与讨论
由于实验条件所限,我们的实验都是在雨滴命中传感器敏感范围内的前提下进行模拟的,在此范围内,传感器的灵敏度较高.实际应用中,可将激光发生器和光敏电阻排布成点阵,应用简单逻辑电路即可扩大感应面积.
目前应用较多的雨滴传感器,大多是用于雨量大小的判断,因此,存在一定的延迟,无法作出实时响应.而本传感器则用有无雨的判断,能达到有雨即反应.有很高的灵敏度和低延迟性.且传感器结构简单,成本低廉.
[1]赵岩,訾鸿.汽车雨滴传感器的设计[J].佳木斯大学学报,2007,25(6).
[2]童诗白,华成英.模拟电子技术基础[M].北京:高等教育出版社,198 0:9.
[3]沈志勤.电子技术基础[M].北京:清华大学出版社,2006:1.
猜你喜欢
——以高PbI2掺杂水平的钙钛矿光阻膜、Bi2S3光阻膜、ZnO光阻膜为例
电子元器件与信息技术(2020年11期)2020-12-14
铁道标准设计(2020年4期)2020-04-26
翠苑(2019年4期)2019-11-11
液压与气动(2019年7期)2019-07-18
扬子江(2019年1期)2019-03-08
山西青年(2017年8期)2017-01-31
大众科技(2015年12期)2015-11-24
液压与气动(2015年2期)2015-04-16
学生天地·小学低年级版(2014年10期)2015-01-14
物理实验(2014年8期)2014-09-12
