
基于AT89S52可控滚轮的设计与实现
2012-04-27 03:39黄天明
生命科学仪器 2012年4期
黄天明
(广西医科大学组织学与胚胎学教研室,南宁530021)
在研究运动损伤、某些药物对运动功能的影响、耐力测试等时,常需要以小型啮齿类动物为实验对象。目前可用于小型动物的运动测试平台较少,主要有平板动物跑台、滚轮运动器、游泳运动等。
平板动物跑台是一种接近动物正常运动方式的装置,且运动量和运动强度可通过调整跑步时间、跑速和跑台坡度来准确控制,常用于需要精确控制运动量的场合;不足之处在于不能用于动物的主动运动,且成本较高,不易普及[1]。而传统的滚轮运动器结构简单,是小型啮齿类动物比较喜欢的一种运动器材,很适合于动物的日常锻炼;但不足之处在于运动量和运动速度不可控制,且难以对运动量进行测量[2]。游泳是比较容易实现一种运动方式,只要有一定的水深即可进行,但也存在运动量不好控制,且不易测量的问题[3]。为弥补以上动物运动测试平台的不足,我们设计了一款基于AT89S52单片机的多功能可控滚轮运动器。
1 拟具备的功能
1)应具备主动运动和被动运动功能。主动运动时,可对运动速度和里程进行测量;被动运动时,可对运动速度和里程进行预设。
2)应具备电刺激功能。被动运动时,如动物的运动速度慢于滚轮的转速,则会因触碰到电极板而遭受电击;但如果电击持续超过一定时间则应进入保护模式并自动下调转速直至稳定。
3)应具备无线传输模块。可与电脑终端相连,从而可方便的实现电脑的实时监控及数据交换和保存。
2 系统的构成
2.1 机械部分
2.1.1 支架:支架为金属结构的双支撑支架,其中一侧为控制端,预留电机及控制电路安装架。
2.1.2 滚轮:为双合型易拆装滚轮,由图1带金属挡板的中轴和图2的滚轮构成。其中中轴的两端可通过螺丝固定于支架上,而滚轮则通过轴承套于中轴上。
图1中,①和⑤两端预留有螺丝孔,可固定于支架上;②和④(外径4mm)可通过604-ZZ微型轴承(4mm×12mm×4mm)与图2滚轮的⑤和⑥(内径12mm,外径15mm)镶嵌;中间③为一栅栏状金属挡板(15cm×10cm),安装时其位于水平位置。

图1 中轴及挡板

图2 双合型易拆装滚轮
图2中,红色的为圆柱状实心塑料棒(16cm×0.6cm),黑色的为中空的表面磨砂金属棒(16cm×0.6cm(内径) ×1cm(外径)),它们相间排列,每侧共40根;棒的一端通过螺丝分别固定于③和④两个金属圆盘(直径25cm)的圆周上,另一端游离;安装时,塑料棒均嵌入对侧的金属棒中。在③上有一个小门⑦,供动物进出用。⑤和⑥通过轴承固定于中轴上;其中⑤端为控制端,其上还依次安装有齿轮和光电码盘。
齿轮用于传动而光电码盘用于对转速及转动里程的测量,其原理如图3所示:A为红外发射管而B为红外接收管;A与B之间有码盘阻隔,码盘圆周有均匀分布的200个小孔;滚轮带动码盘转动时,当小孔刚好转到A与B之间,光线能透过,则B因感应到红外线而输出高电平,反之则为低电平;通过对高电平的计数和计时即可算出滚轮的转动里程和速度。
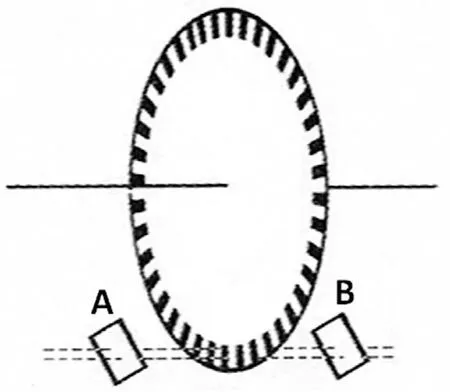
图3 光电码盘测量原理
2.1.3 电机:减速电机固定于支架的控制端,由R370直流电机配合1∶200的金属减速箱构成。使用12V电压时,空载输出转速可达100转/分,扭矩达120mN.m。减速电机通过一个带离合的齿轮箱与滚轮的齿轮配合,可通过离合控制滚轮的主动运动和被动运动。
2.2 电路部分
2.2.1 AT89S52单片机最小系统:AT89S52是一种低功耗、高性能CMOS8位微控制器,与80C51 的指令和引脚完全兼容。其具体参数如下:具有 8K 在系统可编程Flash 存储器,256字节RAM,32个可编程I/O口线,看门狗定时器,双数据指针,三个16位定时器/计数器,八个中断源,掉电后中断可唤醒,全双工UART串行通道。完全可满足本系统的控制需求。
单片机用5V的稳压电源模块供电,采用11.0592MHz的外部晶振,其余资源分配如下:P1.5(MOSI)、P1.6(MISO)、P1.7(SCK)用于在系统编程时,程序的下载;P3.0(RXD)、P3.1(TXD)通过Max232连接无线传输模块,用于与电脑的数据交换;P1.2(RS),P1.3(RW),P1.4(E),P2.0-P2.7分别连于8位数据端口D0-D7,用于1602液晶屏的控制;P3.2用于输出控制电机转速的PWM信号,PWM信号由T0定时器通过中断方式产生;P3.3,P3.4用于电机转向的控制;T2设置为计数模式,通过P1.0接收并计数光电脉冲;P3.5用于控制高压脉冲模块;P0.0-P0.7用于4*4矩阵键盘的控制;T1定时器用于产生基本时基。
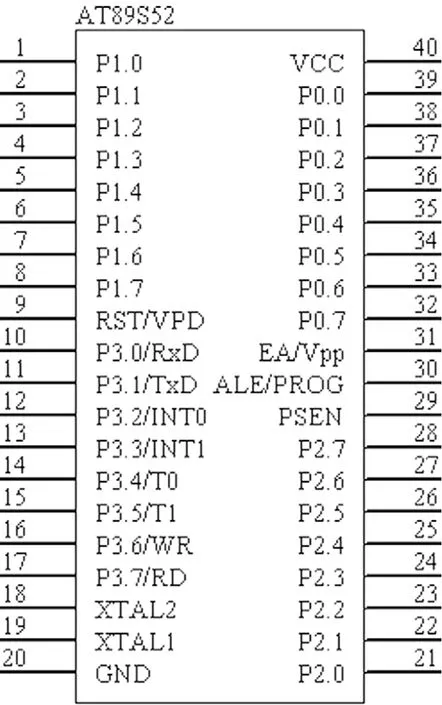
图4 AT89S52管脚分布图
2.2.2 LN298电机控制器
LN298是一种内含两个H桥的高电压大电流全桥式驱动芯片,采用15脚封装,可以直接用标准5V TTL逻辑电平信号来控制直流电机的转向;还具有两个使能控制端,可以接PWM信号控制电机的转速。本系统中,我们直接用P3.3,P3.4的TTL电平输出控制电机的转向;P3.2用于输出控制电机转速的PWM信号,PWM信号由T0定时器通过中断方式产生;电机的驱动使用12V1A的电源模块。
2.2.3 光电采样电路:
本系统滚轮的转动速度一般较慢,则当光电采样器刚好处于孔的边沿,光电信号正好处于门槛电平上时,将会不断地发出错误信号,使得程序控制失效。为此,我们采用了“施密特触发器”结构,电路如图所示:

图5 光电采样电路
由图可见,信号由低到高的比较电平为:((R3//R4)/(R3+ R5//R4) ) * 5V;信号从高到低的比较电平为:((R3/(R3 + R5//R4))* 5V,其中“//”表示并联。由于两者差值的存在,可以有效的消除门槛电压的误信号,使测量更加可靠。
2.2.4 1602液晶屏
1602为标准型16X2液晶显示字符模块,采用标准的16脚接口,其内部已经存储了160个不同的点阵字符图形,主要包括:阿拉伯数字、英文字母的大小写、常用的符号和日文假名等,可满足本系统对显示的要求。其第4脚:RS为寄存器选择;第5脚:R/W为读写信号线;第6脚:E端为使能端;第7~14脚:D0~D7为8位双向数据线。其控制详见前述。
2.2.5 高压发生模块
采用可直接由TTL电平控制的脉冲式高压发生模块,电压范围50V~150V可调,由于采用电容脉冲放电,电流通常<1mA,不会对动物造成器质性的伤害;两个电极分别与滚轮的金属挡板和磨砂金属棒相连。当动物在滚轮内跑动时,如速度慢于滚轮的转速,则会触碰金属挡板,形成高压回路刺激动物跟上滚轮的转速。但如果持续放电超过3s,则系统进入自动保护状态,高压模块停止放电,转轮停止转动,过2s后,自动调低转速1cm/s继续转动;如此反复,直至合适的转速。
2.2.6 无线传输模块
使用Arduino 蓝牙模块,该模块采用CSR主流蓝牙芯片,蓝牙V2.0协议标准,可直接与常见的带蓝牙功能的设备配对。由于模块已经把物理层跟协议层做好,配对后就是透明的串口,可以直接收发串口数据。本系统中,通过max232进行信号转换后,可用于滚轮运动器与电脑的数据交换,便于电脑对运动器的实时监控及数据传输。
2.2.7 轻触按键
采用4*4矩阵轻触式键盘,采用扫描方式读取键值。键盘功能设置如图5所示:

图6 键盘按键分布图
操作方法如下:
主动运动:先打开离合,然后按“测量”,此时屏幕提示“measure?”,再按“确定”,则系统进入待测量状态,当检测到第一个脉冲时,测量开始;再次按下“测量”时,屏幕提示“stop?”,再按“确定”,测量停止。
被动运动:先确认离合处于闭合状态,然后按“预设”,则屏幕提示“speed?”,按“确定”后即可通过数字键直接输入或箭头键上下调整需要的速度,单位为“厘米/秒,再按“确定”,屏幕接着提示“distance?”,按“确定”后即可按同样方法预设运动里程,单位为“厘米”,如不设数值,直接按“确定”,则滚轮会一直转动,如中途需要退出,可按“确定”,待屏幕提示“stop?”后再按“确定”即可停止。
在被动运动状态下,系统默认高压模块为打开。如需关闭,可按“高压”按键一次,提示“stop?”后,再按“确定”即可;如需打开,可再按“高压”按键一次,待提示“open?”后再按“确定”。
2.3 控制流程
本系统的编程采用C语言,控制流程如图所示,可通过两种方式输入控制参数:键盘或通过电脑无线输入。对减速电机的控制采用实时反馈机制:由光电传感器对码盘的转速进行实时监测,将测量结果传回单片机,与预设数值进行比较,并通过惰行方式对电机的转速进行调节。当高压模块发生自我保护时,则可通过下调预设值方式减慢转速。为方便计算,输出速度以“厘米/秒(cm/s)”为单位;里程为“厘米(cm)”;被动运动时,滚轮的最高转速为100cm/s,最低则为5cm/s,可满足一般小型动物运动测试的需要。

图7 控制流程图
3 应用测试
使用5月龄雄性C57BL/6J小鼠20只对滚轮运动器进行性能测试,每次测试时间为10分钟,主要包括主动运动测试和被动运动测试。在主动运动测试中,20只小鼠的平均跑速为14cm/s(20只小鼠在10分钟内的平均速度相加,再除以20),最高瞬时速度为20cm/s,最低瞬时速度为11cm/s,与姚璐等[2,4,5]用普通滚轮测出的速度基本一致。进行被动运动测试,当速度达到24cm/s时,即有小鼠因触碰到金属挡板而被电击,被迫加速跟上滚轮的转速;用 27cm/s的转速时,观察到因小鼠触碰金属挡板时间超过3s而发生系统的自我保护,2s后转速调为26cm/s并继续转动,然后再次发生系统的自我保护,直至最后稳定于23cm/s,说明系统的电刺激及自我保护功能是有效的。
4 小结
本系统以AT89S52单片机为核心,通过光电码盘、LN298电机控制器、减速电机等,实现了滚轮的转速、转动里程监控及被动的定量运动控制。系统制作简单,成本较低廉,且具备了人机互动及与电脑的数据交换功能,故可广泛应用于各种实验动物运动的测试;由于带有电刺激及反馈功能,故还可用于激发运动潜能的测试、耐力测试及过度运动损伤测试等。而滚轮运动器本身也是小型啮齿类动物很喜欢的一种运动器材,故还可用于实验动物的日常锻炼,且可对运动量进行监测。
本系统弥补了现有实验动物运动器材的不足,在医学、农业、体育等领域的研究中都有着广阔的应用前景。
[1] 姚璐, 张缨, 张连峰.跑台运动在动物实验研究中的应用[J].中国比较医学杂志.2010,20(6):75-81.
[2] 卢健, 陈彩珍, 许永刚, 等.小鼠运动方式-转笼的制作与应用[J].广州体育学院学报.2002,22(5):26-27,33.
[3] 谢敏豪, 杨天乐.小鼠流动水游泳水槽.中国运动医学杂志[J].1988,7(1):38-40.
[4] Fordyce DE, Farrar RP.Effect of physical activity on hippocampal high affinity choline uptake and muscar inic binding[J].Brain Res, 1991, 541: 57-61.
[5] 陈运才, 姚志彬, 顾耀铭, 等.长期运动对小鼠运动功能年龄变化的影响[J].中国运动医学杂志, 1996,15:2-6.
猜你喜欢
机械设计与制造(2022年4期)2022-04-28
现代机械(2021年4期)2021-09-03
防爆电机(2021年3期)2021-07-21
防爆电机(2021年1期)2021-03-29
电机与控制应用(2021年12期)2021-02-28
冰雪运动(2019年2期)2019-09-02
科技视界(2019年11期)2019-06-20
阅读(中年级)(2016年11期)2017-01-23
能源(2016年2期)2016-12-01
现代制造技术与装备(2015年4期)2015-12-23
