爬壁机器人吸盘传感系统设计*
2012-04-24 00:53袁浩浩张联盟
传感技术学报 2012年2期
袁浩浩 ,张联盟
(1.广西工学院计算机工程系,广西 柳州545006;2.武汉理工大学信息工程学院,武汉430070;3.华南理工大学机械与汽车工程学院,广州510640)
爬壁机器人是可以在垂直壁面或者斜面上灵活移动,代替人工在极限条件下完成多种作业任务的自动化机器人[1]。它与各种传感器技术相结合,使机器人具有一定的自主探测能力。实现机器人自动控制,自我调节,具有自主攀爬能力,是爬壁移动机器人的重要发展方向。爬壁机器人按照吸附方式可分为真空吸附机器人和磁吸附机器人两种[2]。真空吸盘则是真空吸附式爬壁机器人的重要组成部分,为了实现机器人的可靠吸附除了对吸盘吸附力和壁面状况有要求外还与吸盘与吸附面之间的贴合状况有关系。现有爬壁机器人通过在吸盘上安装接触传感器[3-6]来探测吸盘和吸附面的接触状况,这些需要吸盘接触到吸附面产生信号后才能判断调节各关节使吸盘与吸附面紧密贴合,需进行多次试探[7],没有实现在接近过程中对各关节的调整,因而会产生一定的冗余动作。超声波测距是一种非接触式检测方式[8],本文采用一种非接触式三角布局的超声波测距模块对吸盘与吸附面的姿态进行探测,在测量出吸盘和吸附面之间的距离、倾角等吸盘位姿信号后根据逆运动即可算出各关节调节量,实现在运动过程中对各关节进行调整来使吸盘与吸附面紧密贴合,具有快速性、实时性并且无冗余动作的特点。
1 吸盘上传感系统
在吸盘上安装各种传感器,通过对各信号的采集分析及时调整吸盘姿态来实现吸盘的可靠吸附。机器人结构[9-10]和吸盘上传感器布置如图1所示,吸盘组是由三个小吸盘组成,三个超声波传感器分别布置在A、B、C三处,用来测量吸盘与吸附面之间的距离和吸盘与吸附面之间的夹角,用来控制调节机器人各关节运动量。E处的气压传感器用来测量吸盘内部气压,检测吸盘内部的真空度,保障吸盘可靠吸附。D为倾角传感器,配合超声波测距传感器可以实现任意角度的斜面过渡。各信号的主控电路和传感器的降压、AD转换、滤波、和真空泵电磁阀驱动等电路都集成在吸盘上,方便信号采集和控制。
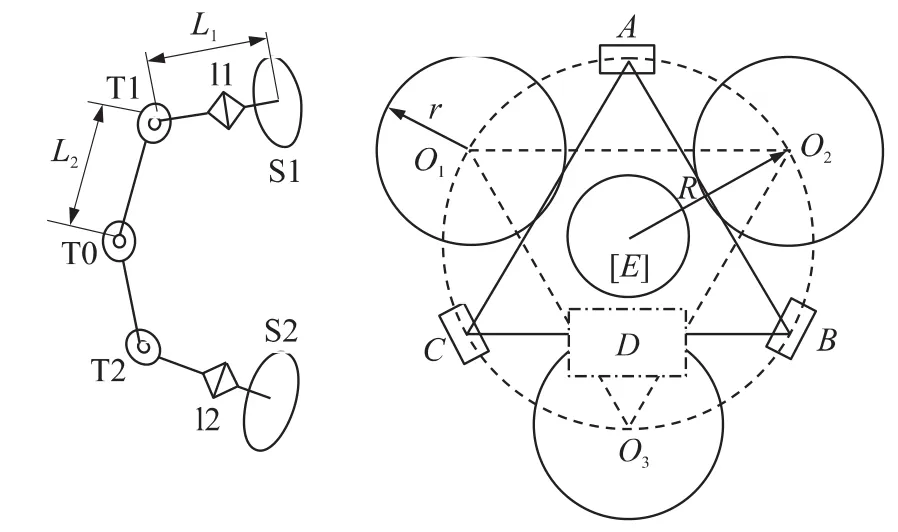
图1 机器人结构和吸盘传感器布局图
2 传感系统设计
为了增强机器人控制的实时性,使用两块C8051F040单片机分别安装在两个吸盘足部,对各传感器信号进行采集处理,根据上位PC下传的控制命令,通过UART方式将信号回传给PC,PC根据传来的信号数据对各关节进行调节控制,然后进一步下达控制命令。C8051F040单片机主频为24MHz,带有4通道12位分辨率的逐次逼近寄存器型ADC,硬件实现的I2C和两个UART串行接口,工作电压为2.7 V~3.6 V。传感系统如图2所示。
图2 传感系统模块
2.1 超声波测距传感器
超声波测距传感器采用正三角布局不仅可以检测吸盘与吸附面之间的距离而且通过计算还可以得出吸盘与吸附面之间的夹角,这样就可以得出吸盘在将要吸附的点的位置和姿态,通过逆运动学方程可求出各个关节的调节量。吸盘能可靠吸附的必要条件是各个吸盘与壁面紧密贴合,不能有任何漏气。首先要求壁面必须是光滑的;其次,当吸盘模块中的一个吸盘边下压,另外两个吸盘紧密贴合壁面时,如图3(a)所示,可使吸盘模块与壁面呈一定夹角α,则吸盘模块与壁面夹角在0~α以内都可以使吸盘可靠吸附。如图3(b)所示,已知各吸盘腔内深度为h=7 mm,半径 r=125 mm,吸盘模块半径 R=130 mm,由此可以计算出:


图3 吸盘倾斜吸附示意图
超声波测距传感器采用URF01-I2C模块实时的测出距离,根据距离值则可以计算出吸盘模块和壁面之间的夹角,从而可以确定吸盘模块末端吸附时的姿态,来调节各个关节使其达到吸附条件。已知超声波传感器组成的三角形边长为d,测出的距离值分别为l1、l2和l3,吸盘和吸附面的夹角为θ,则根据余弦定理、摄影定理等推导出夹角θ:

由上可知,超声波测距传感器测出的距离其中之一每变化1 mm,则计算出来的角度变化0.3°。也就是说超声波测距距离差两两之间不能大于4 mm,否则θ>α,吸盘模块将无法吸附。所以,吸盘与吸附面接触判断条件为:
(1)超声波测距传感器测出的距离在46 mm~50 mm(因为超声波传感器布置在距吸盘底部50 mm处);
(2)θ≤α,即θ不能大于α,否则将无法吸附;
(3)当 n=4-θ/0.3(n 四舍五入取整数),超声波测距传感器测出的结果必须有一个为46+n,其他在46 mm~50 mm之间,以保证倾角较大时距离两两之差不超过4 mm。
2.2 气压传感器
吸盘与吸附面的接触状况最终需要气压传感器来验证,当吸盘腔内真空度满足一定条件即可说明吸盘与吸附面接触良好。气压传感器采用Freescale公司的MPX5100来检测吸盘内部真空度,是一种压阻式传感器,在0℃ ~80℃最大误差为2.5%,输出电压与气压呈线性关系。由于C8051F040单片机输入电压为3 V,MPX5100最大输出电压为5 V,所以需要在单片机与气压传感器之间加一个用LMV358构成的比例运算电路来降压。使用方法是将气压传感器信号经过滤波降压传给单片机,用最小二乘法进行标定,保证信号采集的精度。在实际中吸盘内部气压达到40 kPa就可以满足吸附要求,因此当吸盘内部气压能稳定的下降到40 kPa以下即可说明吸盘与吸附面接触良好,吸盘能可靠的吸附。气压值大于40 kPa时说明未可靠吸附,吸盘与吸附面接触不良或者吸附面不平整。
2.3 倾角传感器
采用VTI公司的SCA100T-D02倾角传感器,配合超声波测距传感器来实现任意角度的壁面过渡和对吸盘姿态进行辅助测量。SCA100T-D02是双轴倾角测量,测量范围为0°~90°,具有高分辨率、低噪声和抗震性。爬壁机器人大多数工作在垂直方向的壁面上,所以倾角传感器垂直布置在吸盘上方便测量。此传感器是电压输出型传感器,为了提高测量精度采用分段直线拟合[11]的方法。先对传感器进行标定,分别多次测出 0°、30°、45°、60°、90°的ADC电压转换值,求取各点平均值;再分别在0°~30°、30°~45°、45°~60°、60°~90°之间采用最小二乘法拟合出一条直线。实际测量时,在相应的直线段内对测量值进行修正即可得出实际角度值。此方法在一定程度上提高了测量精度。
3 系统软件设计
传感系统有序的运行离不开软件系统。单片机初始化后等待PC命令,当接受到命令后进入相应的程序段内。在采集传感器信息时,由于事先对各传感器进行过标定,所以直接对采集数据进行校正处理。然后通过串口将数据传给上位机PC,由于超声波测距模块可以测出吸附点的位置和姿态,再配合倾角传感器,所以PC可计算出机器人各关节调节量,控制机器人攀爬、壁面过渡、吸附和判断障碍物等。单片机主程序流程图见图4。

图4 主程序流程
串口通信波特率为9 600 bit/s,用来接收PC传来的命令和向PC机发送各传感器采集到的信号。
4 实验分析
超声波测距模块回波的能量大小受入射角、反射面大小、形状和材质、空气的湿度和温度等因素决定[12],下面对实验数据(表1)进行分析。

表1 超声波传感器实验数据
表1数据说明在35 mm~65 mm之间,倾角越小测出的距离值越准确,误差在1 mm以内;距离越大倾角越大时测出的距离值越失真。因此吸盘模块贴合墙面不可能一步实现,需要多次测量逐步逼近。
步骤如下:
(1)测距得出吸盘与墙面的夹角和距离值,以测出最短的距离值的1/2算出各关节调整量;
(2)按照关节调节量运动到新的位置;
(3)重复1,2过程直至吸盘贴近墙面并符合吸附条件;
(4)吸附并检查气压是否满足可靠吸附时的气压要求,不满足时检查壁面是否有缝隙或者障碍物。
气压传感器和倾角传感器的测试结果如表2所示,从测量数据可见也能够满足系统要求。

表2 气压传感器和倾角传感器性能指标
机器人根据各关节内部的光电码盘可以计算出当前位置和姿态,通过超声波测距模块可以计算出将要吸附点的位置和姿态,从而通过计算各关节调节量,按照上述步骤即可完成任意夹角的壁面过渡。
在实际实验中,机器人能够实现吸盘与吸附面的可靠吸附和任意夹角的壁面过渡。
5 结论
自主攀爬是仿生爬壁机器人发展的趋势,而传感器则是机器人的触角。本文设计了正三角布局的超声波测距传感器系统、倾角传感器和气压传感器组成的真空吸附式爬壁机器人吸盘的传感系统,采用C8051F040单片机作为各传感器的主控单元,完成了对吸盘位置、姿态等信息采集,结合上位机PC实现了非接触式的吸盘与吸附面状况探测和任意夹角壁面之间的过渡,具有贴近吸附面速度快、无冗余动作等特点,为爬壁机器人自主攀爬打下基础。
[1] 付宜利,李志海.爬壁机器人的研究进展[J].机械设计,2008,25(4):1-4.
[2] 肖立,佟仕忠,丁启敏,等.爬壁机器人的现状与发展[J].机器人,2004,11:81-84.
[3] Xiao Jizhong,Hans Dulimarta,Yu Zhenyu,et al.DSP Solution for Wall-Climber Micro-Robot Control Using TMS320LF2407 Chip[C]//IEEE Midwest Symp on Circuits and Systems:1348-1351,2000.
[4] Li Man-tian,Sun Li-ning,Li Yang.Workspace and Passable Environment Analyse of a Underactuated Inchworm-Like Micro-Robot[C]//IEEE Int.Conf.on Mechatronics & Automation,1741-1744,2005.
[5] Jun Xiao,Jizhong Z.Fuzzy Controller for Wall-Climbing Microrobots[C]//IEEE Transactions on Fuzzy Systems,pages 466 -480,2004.
[6] 王洪光,姜勇,房立金.双足爬壁机器人壁面凹过渡步态规划研究[J].智能系统学报,2007,2(4):40-45.
[7] Jiang Yong,Wang Hongguang,Fan Lijin.A Novel Approach to Fault Detection and Identification in Suction Foot Control of a Climbing Robot[C]//IEEE Int.Conf.on Intelligent Robots and Systems,pages 3423-3428,2006.
[8] 唐颖,张凡,郭勇.移动机器人的超声波测距传感器设计[J].传感技术学报,2010,23(11):1646-1649.
[9] Zhu Haifei,Guan Yisheng,Cai Chuanwu,et al.W-Climbot:A Modular Biped Wall-Climbing Robot[C]//IEEE Int.Conf.on Mechatronics and Automation,pages 1399-1404,2010.
[10] Guan Yisheng,Shi Xuechao,Zhou Xuefeng.A Novel Mobile Robot Capable of Changing Its Wheel Distance and Body Configuration[C]//IEEE Int.Conf.on Robotics and Biomimetics,pages 806 -811,2009.
[11]袁浩浩.一种DSP内部数模转换器的采样精度校正与范围提高的方法[C]//中国通信国际会议论文,2010.
[12]章小兵,宋爱国,唐鸿儒.基于单接收头的超声波多目标测距[J].传感技术学报,2007,20(5):1167-1170.
猜你喜欢
力学学报(2022年6期)2022-07-10
机械工程师(2022年3期)2022-03-24
中学生数理化·七年级数学人教版(2020年12期)2021-01-18
语数外学习·高中版上旬(2020年8期)2020-09-10
科学(2020年3期)2020-01-06
西南石油大学学报(自然科学版)(2018年4期)2018-08-02
电子制作(2017年7期)2017-06-05
广西电力(2016年5期)2016-07-10
广东石油化工学院学报(2016年6期)2016-05-17
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01