水库大坝变形观测的有效措施探讨
2012-04-13 09:58刘晓
黑龙江水利科技 2012年12期
刘晓
(辽宁省白石水库管理局,辽宁朝阳122000)
1 GPS静态定位的优点
1)定位精准度高,所需的观测时间短。运用载波相位观测来做出相应的定位,根据以往许多的实践表明,使用GPS的相对定位精准度可以在50 km以内达到10-6,只需要有15~20 min的时间就能够完成在20 km以内的相对静态定位,这是其他定为手段所不能达到的。
2)各个测试站之间不需要进行通视。这极大地减少了对一些常规测量方法中所需要的制造标志、扫除通视障碍等等所需要的费用。
3)没有时间限制。GPS系统可以进行全天候观测,不会受到阴天、黑夜、大雾、大风、雨雪等气候的影响。
4)为统一的坐标系统提供3D立体信息。GPS定位对于坐标的计算是在国际统一坐标系统中进行的,不同地点的测量成果都具有一定的关联性,传统的大地测量方法是采用不同的方法对平面和高程分别进行测量,测量出来的数据只是2D平面的,而GPS可以同时精确测量地点的3D坐标。
5)操作简单便捷。随着GPS接收机的不断改进,它的自动化水平越来越高,有的接收机已经达到了“傻瓜化”的程度;GPS接收机的体积在不断减小,重量也随着减轻,极大地缓解了测量工作者的紧张情绪和降低了劳动强度,让测量工作者的野外工作变得轻松愉快。
6)功能多、应用广。GPS系统不仅可用于测量、导航,还可用于测速、测时等。
2 大坝变形因素分析
大坝变形的原因主要有以下几种:
2.1 静水压力
1)在静水压力的作用下,坝体不同高度处受到了不同的水平推力,促使坝体形成挠曲变形。
2)由于水库水压及坝底扬压力对大坝的作用,从而使得坝体向下游方向转动,最终引起大坝变形。
3)由于受到水库水体自身的重力作用,水库库底变形,从而使得大坝的坝基向上游方向转动,最终引起大坝变形。
2.2 坝体的温度变化
大坝坝体的上下游混凝土的温度变化不同,例如在夏季,大坝下游的混凝土整天受到太阳的暴晒,温度上升的快,一段时间过后,温度高于当天气温,可是在大坝的上游面,大部分的混凝土是处在水下的,太阳无法直射,所以温度就低于气温;在冬季,情况相反。这种温度的变化使大坝产生了季节性的摆动。坝体温度变化而引发的混凝土胀缩是导致坝顶下陷的主要因素。另外,一些刚建成的大坝,坝体本身的混凝土也会产生热胀冷缩的状况,这也间接导致了坝体变形。
2.3 时效变化
由于混凝土的收缩变化等等一些建筑材料的变形,再加上基础岩层在荷载作用下的变形而产生时效变化。时效变化的主要特点就是施工期间与运营的初期现象比较明显,随着时间的推移就会逐渐稳定,出现时效变化也就越来越少。时效变化是不可避免的。
3 测量实施
根据我国现有的对于大坝的观测资料来看,坝基发生变形主要是由于垂直位置的移动和倾斜方面的变化,受到温度的影响可以忽略不计。对于大坝变形观测的主要内容是坝体的垂直和水平移动以及挠曲方面的观测。对于垂直移动观测,主要使用的是:①精准水准测量、GPS等等技术;②水平移动的观测是采用前方交会、GPS等项技术;③对挠曲情况的观测主要采用正、倒线观测系统。另外还会对大坝进行裂缝监测,以及大坝坝体的温度、压力的变化也都需要进行观测。本文主要是对水平和垂直位移进行观测。
3.1 大坝变形观测设计
在大坝变形观测中最基础的就是要设计基准点,并且必须要保证基准点的坚固和稳定。所以基准点应该要选择大坝变形区以外的地址较好,又能够永久保存的地方。为了对基准点的稳定进行检验核准,在水平和垂直位移监测的基准点都是以组的形式存在。水准基点组都是选在距离水库1 km的地方,有3个点组成一个等边三角形。水平位移的基准点是选在距离水库约1.5 km的远离变形区的地方。3个基准点,两两互相通视,这样方便使用大地测量方法来对所设立的每个基准点进行检核。
3.1.1 水平位移观测
水平位移观测方法是采用布设GPS监测网,在大坝的坝脚、坝坡以及坝顶布设3个监测网,用连接的方式分别将这3个监测网与已经设定的,距离大坝有1.5 km的4个基准点进行联测。将基准点、工作基点以及校核基点都列入主网的范围,进行统一观测。为了能够提高GPS网的精确度与可靠度,GPS的每个点与点之间要构成尽量多的异步环,这个异步环是由GPS独立边组成的,能够让GPS网具有足够的多余观测。
3.1.2 垂直位移观测
垂直位移观测采用精密水准测量法,在大坝开外1 km的地方设置3个基准点,使用电子水准仪进行观测,并且与国家所建立的二等水准点进行联合观测,来测定基准点的高程。从基本水准点开始进行测量,然后依次经过大坝的坝脚、坝坡以及坝顶,这样就能够形成一个闭合的观测路线,从而对大坝的垂直位移进行观测。
3.2 GPS网观测
采用3台由日本托普康公司所生产的精密Top Con Hi Per双频GPS接收机来对大坝变形进行观测,该仪器配备有可以抑制多路径效应的扼流圈天线,作业采取的方式是用静态相对定位的方法来进行观测。
3.3 数据处理
3.3.1 基线解算
由于GPS网对于数据的要求较高,所以在进行基线向量解算时一定要将对流层对数据的影响纳入考虑范围,采用特殊的软件对对流层所产生的影响进行改进解决,还需要采用精密星历的方法来进行解算,得出的基线结果要用双差固定解。
3.3.2 GPS网平差
在完成基线解算之后,在WGS-84坐标系下进行3D无约束平差,对于无约束平差需要对其参数进行统计检验:
1)方差分量因子估值σ2检验;
2)每个改正数粗差的检验。
为了能够提高GPS测量的精确度与可靠性,在完成无约束平差计算之后,还应该及时对同步环闭合差、异步环闭合差以及复测边等项进行检查计算,在基线解算质量检核的基础上,进一步对GPS网内部符合精度与外业观测的质量进行检测,产生的独立闭合环坐标闭合差应满足以下条件:
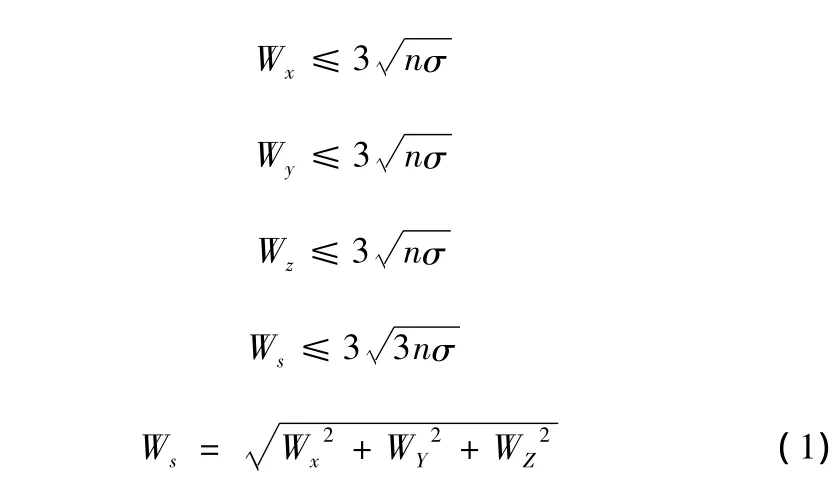
式中:σ为标准差;Ws为环闭合差,n为独立环中边数。
基线分量的改正数绝对值应满足下式:
V△x≤3σ V△y≤3σ V△z≤3σ σ为相应级别规定的基线的精度。
4 提高精度的措施
1)采用强制对中的观测墩。如果将GPS天安装在三脚架上进行观测,那么产生的对中误差一般是在1~3 mm,并且当GPS观测的时间比较长的时候,三脚架的脚架就会因为受到风水以及日晒而发生变形,从而影响测量的精准度,所以,在GPS变形监测点上应该采用强制对中的观测墩,把观测墩作为测量标志,并且要妥善保护,防止它受到破坏。
2)采用具有强抗干扰能力的天线,并在观测中将天线朝北进行定向。GPS天线的相位中心的偏差一般都只有几mm,为了能够减少天线所存在的定向误差对GPS基线向量的影响,需要在每个观测墩上标出指向北方的标志,在进行观测时要将天线按照定向线的位置进行安置。
3)安排足够的观测时间以及选择恰当的窗口进行观测。卫星星历所造成的误差对于GPS的基线具有一定的影响,在采用广播星历受到可用性技术干扰时,不同时刻所收集到的广播星历在坐标框架中的方向偏差就会有2″,尺度偏差范围在10-6~10-7,这种偏差对大坝变形观测的结果具有较大的影响。
研究表明,如果观测的时间较长,那么只要对收到的星历进行拟合,就可以提高星历的精确度,还能够满足大坝变形观测的需求。所以,在采用GPS技术对大坝进行形变监测时,一定要有的足够的时间来观测,与此同时,延长观测时间还能够减少随机误差的产生,进一步提高观测精确度。
4)制定合理的观测方案。方案中需要注意的是,一定要保证有足够的多余观测,以便于剔除粗差,减少误差的积累。
5 结语
随着科学技术的不断发展与进步,测绘技术也是在不断发展,GPS系统的应用范围将更加广阔,也必定会出现更好的水库大坝GPS自动化变形监测系统。
[1]杨光,何秀凤,华锡生,等.GPS一机多天线在小浪底大坝变形监测中的应用[J].水电自动化与大坝监测,2003,27(3):52-55.
[2]胡友健,梁新美,唐辉明.关于滑坡监测精度及复测周期的合理确定[J].地质科技情报,2002,21(2):91-93.
[3]王家帮,李忠财,李海文.GPS技术在某电视塔的变形监测中的应用[J].大众科技,2010(06):39-40.
[4]卢欣春,邹念椿,战晖.激光光束对大坝变形监测精度的影响因素及解决方法[J].水电自动化与大坝监测,2006,30(5):43-45.
[5]赵同龙,赵吉涛,路奎.前方交会三角测高法变形监测应用研究[J].山东建筑大学学报,2010,25(3):347-350.
[6]张琳,易亚星,刘志勤.真空激光准直系统在大坝变形监测中的应用[J].水利与建筑工程学报,2007,5(04):111-113.
猜你喜欢
科学技术创新(2022年11期)2022-04-20
华中建筑(2022年4期)2022-04-14
建材发展导向(2021年19期)2021-12-06
现代测绘(2021年1期)2021-04-28
黑龙江水利科技(2020年8期)2021-01-21
科学(2020年5期)2020-11-26
中国惯性技术学报(2019年3期)2019-10-15
中国工程咨询(2017年9期)2017-01-31
舰船电子对抗(2016年5期)2016-12-13
航天器工程(2014年5期)2014-03-11