
简析阻拦索装置定长冲跑控制阀
2012-03-24 13:44杨茂胜毕玉泉陈跃良杨炳恒姜文豪
海军航空大学学报 2012年2期
杨茂胜,毕玉泉,陈跃良,杨炳恒,姜文豪
(海军航空工程学院青岛分院,山东 青岛 266041)
美国现役的MK7-3型拦阻装置是目前世界上各国海军中拦阻能量等级最大的着舰拦阻装备,能量等级达到6 500 t·m。当固定翼舰载机以航速240 km/h 着舰时,MK7-3型拦阻装置能够保障飞机在102 m 内安全着舰[1-3]。定长冲跑控制阀是MK7-3阻拦装置的心脏,它通过控制定长冲跑控制阀阀口的节流压降,将阻拦机主液压缸的液压能转化为热能,有效控制阻拦机主液压缸的压力变化规律和飞机的阻拦距离,在规定的阻拦距离内,为不同重量和速度的飞机提供理想的阻拦力[4-5]。
本文介绍了MK7-3型拦阻装置定长冲跑控制阀的结构组成,分析了其基本控制原理,讨论了常见故障的种类及其产生的原因。
1 MK7-3型拦阻装置工作原理
如图1所示,当舰载机着舰时,飞机尾钩钩住用钢索支撑系统支撑至甲板面一定高度的阻拦索,飞机前冲力通过阻拦索传递到滑轮组索上,滑轮组索再将该作用力传递到滑轮缓冲装置、阻拦机动滑轮组、定滑轮组、钢索末端缓冲装置上。阻拦索的初始冲击力迫使滑轮缓冲装置动作,减少阻拦索的峰值应力,随着滑轮组索被飞机尾钩不断拉出,阻拦索牵动阻拦机动滑轮组向定滑轮组方向移动从而带动主液压缸柱塞运动,主液压缸中的工作液经定长冲跑控制阀阀口节流降压后流向蓄能器,主液压缸内产生液压力,为飞机提供阻拦力,同时蓄能器内的压力随之也升高,为阻拦索装置的复位提供了压力能[6-7]。
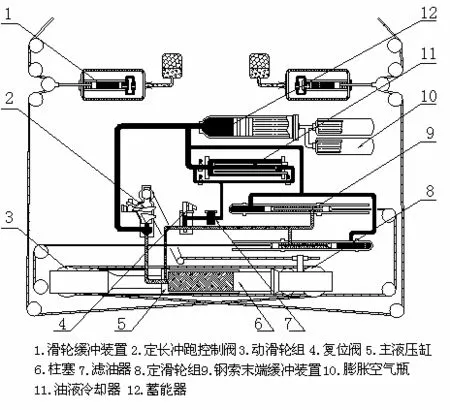
图1 MK7-3型拦阻装置工作原理
当着舰飞机的前冲运动停止时,阻拦索和滑轮组索中的应变能将会使飞机稍微往回滑动,阻拦索便自动地从飞机尾钩上脱落。打开复位阀,蓄能器内的压力液体通过油液冷却器冷却和油液过滤器过滤后进入主液压缸,将柱塞连同动滑轮组、定长冲跑控制阀驱动系统推至初始待命位置,从而使阻拦索装置又恢复到待阻拦状态,待完全复位后,关闭复位阀,为下次阻拦作准备。
2 结构组成
如图2所示,MK7-3型拦阻装置定长冲跑控制阀主要由阀体、阀体支柱和飞机重量选择器3部分组成。
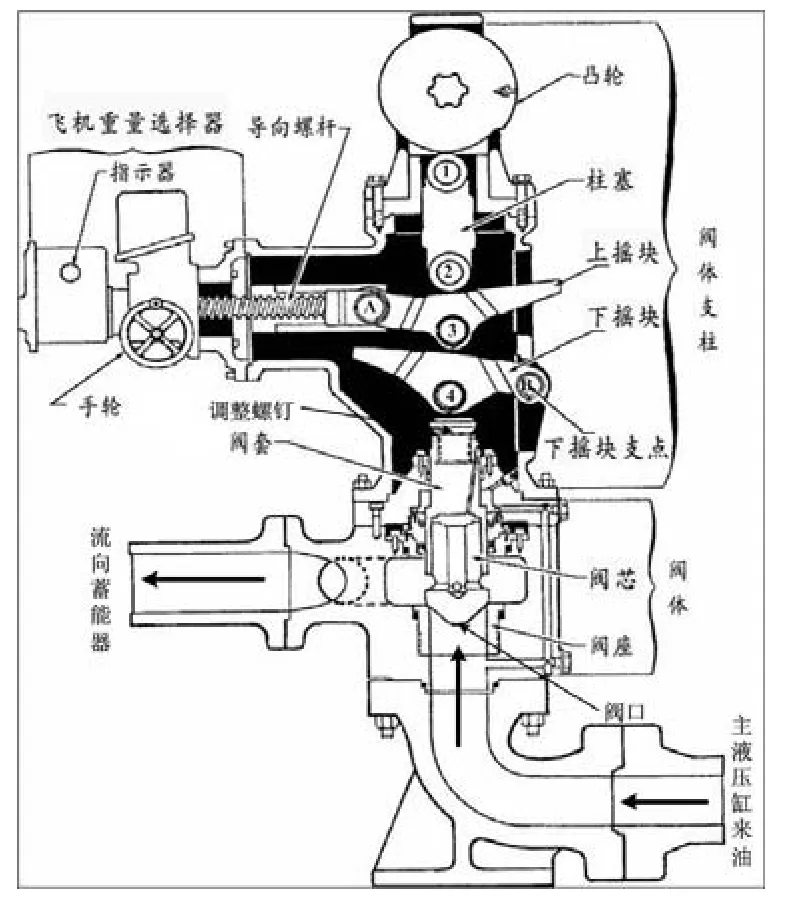
图2 定长冲跑控制阀结构示意图
2.1 阀体
阀体由阀套、阀芯、阀座和一些安装组件组成。工作时,一方面从主液压缸的来油通过阀座流向阀口,在阀口处经节流降压后,由阀体流向蓄能器;另一方面,调整螺钉在外部作用力的带动下推动阀套,从而带动阀芯向下运动,逐渐关闭阀口。阀体组件的实质就是一个由外力所控制的节流阀,主要作用是在阀口上下两端产生压力差,为飞机提供阻拦力。
2.2 阀体支柱
阀体支柱由凸轮和上、下摇块以及柱塞组成的摇臂机构两部分组成。其中,凸轮安装在水平方向的凸轮轴上。工作时,在链轮的带动下,凸轮绕着凸轮轴做旋转运动,通过凸轮旋转时凸轮线型的变化就可以控制阀口的关闭规律。
摇块机构从上至下共有4个轴承,其中1号轴承与上端凸轮组件的凸轮相连,4号轴承与下端阀体组件的调整螺钉相连,在1号和4号两个轴承之间安装有上、下两个摇块。工作时,轴承1在凸轮旋转力的作用下和轴承2 一起向下运动,轴承2的运动带动上摇块绕着支点A 做顺时针转动,从而推动轴承3 向下运动,轴承3的运动又带动下摇块绕着支点B 做逆时针旋转,从而推动轴承4 向下运动,最终带动与之相连的调整螺钉向下运动,逐渐关闭阀口。
在阀体支柱中核心就是这两个摇块,从这两个摇块的简化示意图图3中可以看出,假如此时轴承3和4都处在上、下摇块的中间位置,那么要想轴承4 向下移动1个单位长度,就需要轴承3 向下运动2个单位长度,而轴承2就需要向下移动4个单位长度,即轴承2与轴承4 向下移动距离的比值是4∶1,这个比值叫做臂长比。进一步来看,轴承2移动的距离也就是凸轮最下端点移动的距离,而轴承4 移动的距离也就等于阀芯向下移动的距离,由于凸轮的转动和阀芯的向下移动是同步进行的,所以,距离的变化也就代表了速度的变化。因此,臂长比在这里反映的实质就是凸轮线型变化时最下端点移动速度与阀芯移动速度之间的比值。假如没有这两个摇块,阀芯向下移动速度就等于凸轮最下端点移动速度,而有了这两个摇块,阀芯的向下移动的速度既可以等于又可以不等于凸轮下端的移动速度,也就是说通过摇块臂长比的改变,就可以改变阀芯向下移动速度,这就是安装这两个摇块的主要作用。
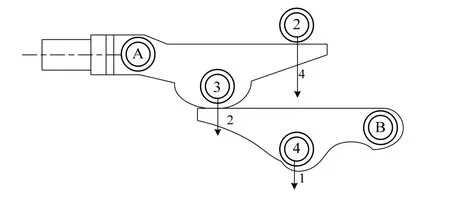
图3 摇块机构示意图
2.3 飞机重量选择器
飞机重量选择器安装在阀体支柱上摇块左端,主要由指示器、手轮和导向螺杆组成。当需要调整飞机重量设置时,通过电机带动或者手轮旋转,就可以带动导向螺杆伸缩,改变上摇块支点A的位置,支点位置A的改变,使得轴承2和轴承3分别在上、下摇块上的位置也发生变化,也就改变了整个摇块机构的臂长比。另外,支点位置A的改变,通过摇块结构的传动,带动轴承4 向下运动,最终反应在阀芯向下移动的距离上,也就是阀的初始开口大小。预开口大小的调节,使得阻拦力大小适应了飞机重量的变化,而臂长比的改变,保证了重量设置不同时阀口的关闭时机相同。
当导向螺杆处于最大伸出状态时,也就是立柱组件中的4个轴承处在同一直线上时,初始状态下阀芯向下移动的距离最小,也就是阀的预开口最大,此时所设置的飞机重量应该最轻,摇块机构的臂长比为1∶1。随着导向螺杆逐渐向左缩回,阀芯向下移动的距离越来越大,臂长比也逐渐增加,当导向螺杆向左运动到底处于最大缩回状态时,阀芯向下移动的距离最大,也就是阀的预开口最小,此时所设置的飞机重量应该最重,同时臂长比增加到最大,为4∶1。但是不管所设置的飞机重量轻还是重,在飞机达到规定滑跑距离时凸轮转动的角度都是一样的,由于凸轮线型一定,因而轴承1 向下移动的距离也一样。只是重量轻时,预开口大,也就是要使得阀口关闭需要阀芯向下移动的距离h1就大(见图4a));重量重时,预开口小,h2就小(见图4b))。但是重量轻时的臂长比小,轴承1 向下移动1 mm,阀芯也向下移动1 mm,而重量重时,臂长比大,轴承1 向下移动4 mm,阀芯才向下移动1 mm,即是重量轻时阀芯向下移动的速度快,重量重时阀芯向下移动的速度慢。这样就可以保证在相同时间内让h1和h2都能同时变为0,也就是让阀口同时关闭,飞机同时停住。
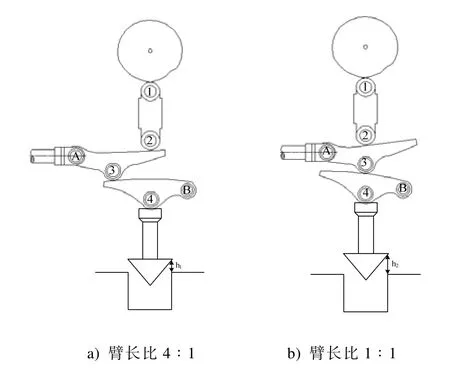
图4 重量选择器摇块机构的臂长比
3 控制原理
由阻拦装置基本工作原理可知,阻拦力的大小最终是反映在主液压缸内的液压压力上。因此,控制阻拦力的变化,也就是控制主液压缸中的压力变化,使其满足阻拦需求:一方面,飞机在阻拦过程中过载要平稳,也即尽量保持阻拦力恒定;另一方面,还需适应飞机重量变化。
为了分析方便,将阻拦装置中的相关部件动滑轮柱塞、主液压缸、定长冲跑控制阀单独列出来,如图5所示。
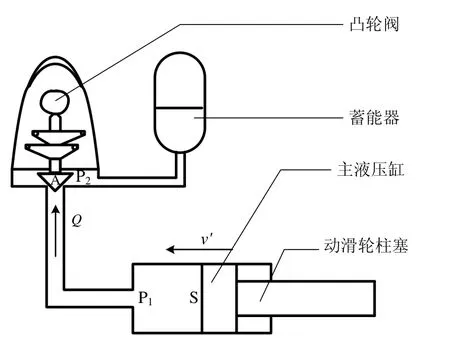
图5 定长冲跑控制阀控制原理
由液压原理可知,单位时间内流过阀口的液压油流量Q是与阀口上下两端的压力差 ΔP以及阀口面积A 成正比,即:

式中,k1是一个与阀口形状、油液性质有关系的系数,在这里是一个常数。而流过阀口的液压油也就是从主液压缸中排出的液压油,其流量大小可用主液压缸缸筒的移动速度v'和缸筒面积S的乘积来表示,而缸筒的移动速度与飞机滑跑速度v 成正比,因而流量还可以表示为:

式中,系数k2是缸筒移动速度与飞机滑跑速度间的一个比例因子。联合式(1)和(2),消掉Q就可以求得A的大小,
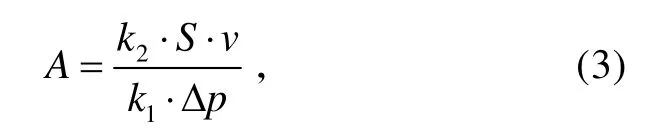
式中,k1、k2和S 这3 项都是常数,用另外一个系数k 来代替,最终得到阀口面积A的表达式

由于阀口上端的液压油是流向蓄能器的,其工作压力在2~4 MPa之间,而主液压缸中的工作压力P1一般在60 MPa 左右,因而P2的数值相对于主液压缸中的压力P1来讲是一个小量,可以近似地认为阀口上下两端的压力差 ΔP代表了主液压缸中的压力P1。要满足过载稳定的需求,也就是要求 ΔP 不变,而飞机速度在滑跑过程中是逐渐减小的,因而就要求阀口面积也逐渐变小;反过来,只要能控制好阀口面积的变化规律,让其与飞机速度的变化规律相同,就能保证 ΔP 不变,从而满足过载稳定的需求,同时当飞机达到规定滑跑距离时控制阀口,让其完全关闭,面积为0,速度就为0,飞机停止向前滑行,也就达到了定长阻拦的目的。所以,控制阻拦力变化使其满足过载稳定和定长阻拦两个需求都可以通过控制阀口面积的变化规律来实现。
当飞机重量增加时,所需阻拦力也需增加,也就是要增大 ΔP。在初始条件下,由于飞机着舰的初始速度v0一定,由式(4)可知,要想增加 ΔP,就必须减小阀口面积A,也就是阀的初始开口要变小。所以,要满足飞机重量变化的需求,只要控制阀的初始开口大小就可以实现,让飞机重量大时阀的预开口小,重量小时阀的预开口大。
4 工作过程
定长冲跑控制阀的工作过程如图6所示,飞机尾钩钩住阻拦索后,一方面,主液压缸中的工作液经凸轮阀流向蓄能器,当油液高速流过凸轮阀时,在阀口上下产生压力差 ΔP,从而为飞机提供阻拦力;另一方面,凸轮轴右端的链轮在驱动系统带动下开始转动,进而推动凸轮旋转,凸轮旋转时线型变化推动其最下端点向下移动,带动立柱主件上的轴承向下运动,通过摇块结构的传动,推动阀芯向下运动,改变阀口面积A,从而控制阀口上下两端压力差的变化规律,当飞机达到规定滑跑距离时,凸轮阀阀口在凸轮线型变化下完全关闭,飞机停住,阻拦过程结束。此外,当飞机重量发生变化时,通过重量选择器的设置,一方面,可以调节阀的预开口大小;另一方面,还改变了机构的传动比,最终使得不同重量飞机都能在相同的规定滑跑距离内停下。这就是整个凸轮阀的工作过程。
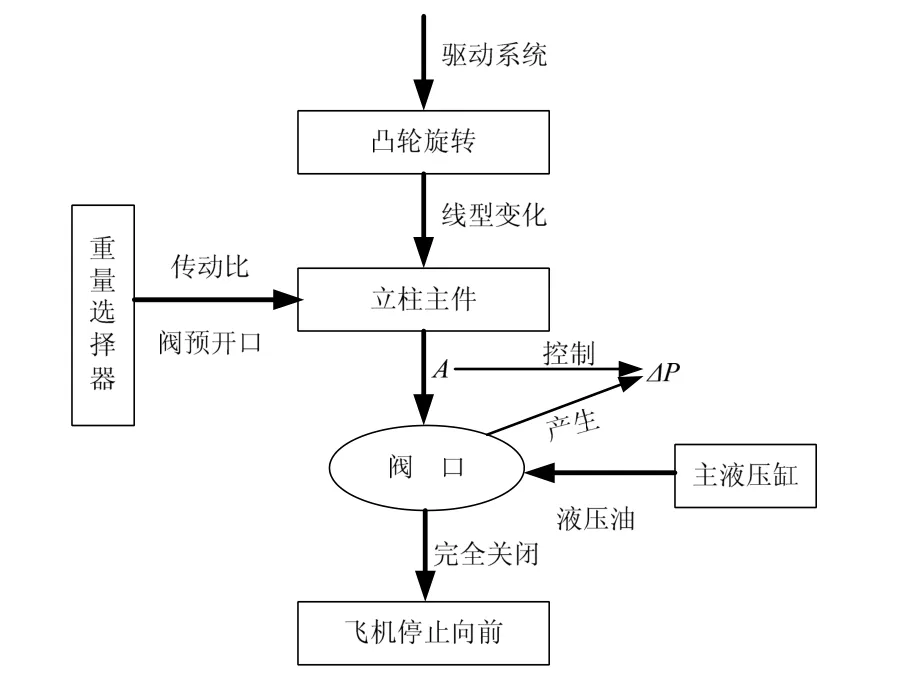
图6 定长冲跑控制阀工作过程
5 常见故障分析
通过对收集资料的整理、分析后发现,定长冲跑控制阀在使用中最常见的故障主要有3类,分别是飞机重量设置不准、阀芯不能正常关闭和密封件出现渗漏。
5.1 飞机重量设置不准
假如在阻拦作业前飞机重量设置偏小,阀的预开口偏大些时液压油就能更容易流过阀口。因此,在阀口上下产生的压力差 ΔP就偏小,为飞机提供的阻拦力也偏小,而阻拦力小,则飞机在达到规定滑跑距离时,速度就还不能减为0。但由于阀口关闭时机不因飞机重量设置而改变,也就是在此时阀口已完全关闭,由式(4)可知,面积A为0,速度v不为0,因而 ΔP 趋于无穷大,从而产生一个极大的过载,强行将飞机停下,整个阻拦过程中过载的变化趋势如图7中的虚线所示。由于过载太大,一方面,可能超出飞行员或机体的承载能力,造成人员受伤或飞机损伤;另一方面,还能可能导致阻拦钢索断裂,造成机毁人亡的事故[8-9]。
假如在阻拦作业前飞机重量设置偏大,则在阻拦开始的瞬间,阻拦力迅速增加,产生一个过载极值,如图7中点划线所示。如果此极值在飞行员或机体的承受范围以内,则阻拦作业是安全的,只是飞机的阻拦距离比正常时要短,一旦此极值超出了承受范围,则可能造成比重量设置偏小时更为严重的后果[10]。
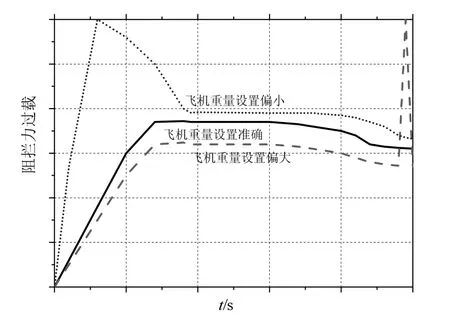
图7 重量设置不准对过载的影响
5.2 阀芯不能正常关闭
定长冲跑控制阀阀蕊是控制阀口上下两端的节流压降,将阻拦机主液压缸的液压能转化为热能,有效控制阻拦机主液压缸的压力变化规律和飞机阻拦距离的关键部件。由于舰艇长期服役于海洋环境中,其内部结构件直接或间接地受到海水的侵蚀,腐蚀现象较为严重,使得定长冲跑控制阀在使用一段时间后在阀蕊的表面出现腐蚀产物的堆积,导致阀蕊不能正常关闭,引起二次阻挡。因此,在定长冲跑控制阀的使用中,应当定期检查阀芯的腐蚀情况,发现问题及时进行修理或更换。
5.3 密封件出现渗漏
在定长冲跑控制阀的初始安装时,如果O型密封圈、挡圈等密封件安装质量不好,或者在使用过程中出现损坏,密封件将出现渗漏现象,使得系统压力不稳定,从而影响到定长冲跑控制阀的工作可靠性,降低阻拦作业的安全性。为了防止此类故障现象的发生,在工作中应按时仔细检查密封件的质量、渗漏情况,出现问题立即进行重新安装或及时更换。
6 结论
本文以美国现役的MK7-3型拦阻装置定长冲跑控制阀为例,分析了它的基本控制原理,讨论了其在使用当中容易出现的故障,并分析了其故障产生的原因。结果表明:维护操作不当造成的重量设置不准、阀芯不能正常关闭和密封件出现渗漏是最典型的3种常见故障,其中飞机重量设置偏小和偏大都会引起阀口初始面积的变化,使得阻拦力过载产生突变,从而造成飞机损伤或者人员伤亡,甚至导致阻拦作业失败。
[1]陶杨,贾忠湖,侯志强.舰载机拦阻着舰动力学研究[J].海军航空工程学院学报,2010,25(2):133-137.
[2]欧讯.航母的拦阻装置[J].现代舰船,2005,43(9):45-47.
[3]李杰,于川.航空母舰的舰载机着舰装备[J].现代军事,2006,41(10):56-58.
[4]DMITRIY MIKHALUK,IGOR VOINOV,PROF ALEXEY BOROVKOV.Finite element modeling of the arresting gear and simulation of the aircraft deck landing dynamics[R].European LS-DYNA Conference,2009.
[5]焦方金,靳红生.浅谈舰载战斗机的降落[J].舰载武器,2005,13(6):82-85.
[6]黄胜,孟祥印,常欣.航母舰载机降落制动滑跑距离分析及预报[J].中国舰船研究,2009,4(2):11-14.
[7]王海东,毕玉泉,杨炳恒,等.MK7-3型拦阻装置滑轮运动特性分析[J].舰船科学技术,2011,33(2):75-77.
[8]柳刚,聂宏.飞机拦阻钩碰撞动力学和拦阻钩纵向阻尼器性能[J].航空学报,2009,30(11):2093-2099.
[9]徐胜,徐元铭,王永庆.舰载机着舰拦阻建模仿真研究[J].飞机设计,2009,29(5):5-9.
[10]于立明,韩庆,李启明.飞机偏心拦阻过程动力学分析与仿真[J].计算机仿真,2010,27(8):28-32.
猜你喜欢
鞍钢技术(2022年3期)2022-06-12
中国金属通报(2021年17期)2021-12-23
化工设计通讯(2021年9期)2021-01-08
应用能源技术(2020年9期)2020-12-14
科技视界(2018年21期)2018-12-10
建筑工程技术与设计(2015年26期)2015-10-21
专用汽车(2014年1期)2014-12-10
筑路机械与施工机械化(2014年2期)2014-03-01
汽车零部件(2012年2期)2012-07-25
Beijing Review(2010年42期)2010-10-14
