
基于HLA的舰空导弹协同制导作战仿真系统方案
2012-03-24 13:43赵永涛胡云安熊厚情
海军航空大学学报 2012年2期
赵永涛,胡云安,熊厚情
(1.海军航空工程学院控制工程系,山东 烟台 264001;2.92060部队,辽宁 大连 116000)
分布交互仿真始于20世纪80年代的SIMNET(SIMulation NETworking),发展于分布交互仿真DIS和聚合级仿真协议ALSP(Aggregate Level Simulation Protocol)。但这些协议普遍存在仿真器的应用实现较为独立、仿真器之间的互操作性和重用性差等问题。为此,美国国防部DoD(Department of Defense)提出了建模和仿真的高层体系结构HLA(High Level Architecture)。它建立了一个新的仿真体系结构和一系列的标准,克服了DIS和ALSP的缺点,实现了各种类型的仿真系统间的互操作和仿真系统及其部件的重用,真正实现将构造仿真、虚拟仿真和实物仿真集成到一个综合环境中,以满足不同类型仿真的需要[1]。
在现代海战中,舰艇编队对来袭目标的视距内拦截无法对抗反舰导弹的饱和攻击,不能保证舰艇的安全。现在各国都在研究多平台的协同制导作战能力,使舰艇编队具备超视距拦截低空反舰导弹的能力[2-4],并采用分布式与半实物仿真技术来进行各武器系统的仿真系统设计,以验证所作理论工作的正确性和有效性[5-8]。本文针对舰舰协同和空舰协同这两种典型的协同制导舰空导弹作战模式,根据协同制导仿真的需求,基于HLA分布式仿真技术设计了一套超视距协同制导舰空导弹作战仿真系统,可以生动有效地展现协同制导舰空导弹作战过程,并可用于舰空导弹超视距协同制导各关键技术的实验室验证等工作。
1 协同制导作战流程
舰舰协同制导舰空导弹典型作战想定:在某海域,我舰艇编队由舰艇A和舰艇B两艘舰艇组成,敌一枚反舰导弹(目标)袭击舰艇编队,在目标来袭方向上,舰艇B处于编队的前方。
舰舰协同制导作战流程[9]为:目标低空高速向舰艇编队飞行,随着时间的推移,首先处于舰艇B的视距内;舰艇B发现并跟踪目标,通过编队数据链将火控级的目标信息传送给舰艇A;舰艇A将接收的目标数据进行时空一致性转换,并完成舰空导弹的发射;在导弹飞行过程中,舰艇B实时向舰艇A传送目标信息;舰艇A通过无线电收发设备将转换后的目标信息发送给导弹;导弹根据接收的目标信息和惯导装置测得的导弹状态,依据中制导律控制导弹拦截目标;弹目相对距离达到末制导雷达作用距离时,导引头开机,中末制导交班完毕,导弹依据末制导律精确命中目标,实现对来袭目标的超视距拦截。
空舰协同制导舰空导弹的作战流程同舰舰协同制导,不同的是制导平台舰艇B由空中平台P代替。
2 协同制导作战仿真系统分析
2.1 仿真系统总体组成
通过给定的舰舰协同制导和空舰协同制导作战流程,协同制导仿真系统由舰艇编队、空中平台、舰空导弹武器、来袭目标、视景仿真和仿真系统控制等6部分组成部分。
其中,舰艇编队部分由两艘舰艇组成,分为舰艇1和舰艇2,舰艇1 作为发射舰,舰艇2为协同制导舰;空中平台部分由1架舰载直升机和1架预警机组成;舰空导弹武器部分为1枚半实物导弹和3枚虚拟舰空导弹;来袭目标为2枚低空飞行的反舰导弹。
2.2 各组成单元模型分析
1)舰艇编队部分。舰艇编队部分由舰艇1 平台和舰艇2 平台组成,每个舰艇平台由舰艇仿真计算机、质心运动学数学模型、探测制导数学模型、指挥与火控数学模型、协同制导交接控制数学模型和无线电指令收发数学模型等6部分组成。舰艇平台实现的功能有:完成对来袭目标的探测制导;进行发射条件判断,并实时计算射击诸元,完成参数的装订;完成导弹的发射与截获;进行编队间的数据传送,完成与导弹之间无线电指令信号的收发;完成中制导阶段多制导平台间的协同制导交接和中末制导段的目标交班。
2)空中平台部分。空中平台包括预警机和直升机2部分,分别由预警机(或直升机)仿真计算机、质心运动数学模型、探测制导数学模型、协同制导交接控制数学模型和无线电指令收发数学模型等5部分组成。空中平台实现的功能有:完成对来袭目标的探测制导;完成平台与导弹间的无线电指令信号收发;完成中制导阶段制导平台的协同制导交接和中末制导段的目标交班。
3)舰空导弹武器部分。舰空导弹武器部分包括4枚舰空导弹,其中,1枚为半实物舰空导弹,3枚为虚拟的舰空导弹。
①半实物舰空导弹。半实物舰空导弹部分包括半实物导弹仿真计算机、I/O 板、转台控制机柜、转台伺服执行机构、三自由度转台、角速率陀螺仪、导弹运动学与动力学数学模型、舵机数学模型、无线电指令收发数学模型、导引头数学模型、捷联惯导解算模型和制导控制模块。完成导弹的运动参数解算、全弹道制导控制、无线电指令收发、控制回路引入仿真实体等功能。
在这一部分,将角速率陀螺仪接入到数字仿真模型回路,用于敏感导弹姿态及姿态变化率,并将三轴转台引入,用于复现由仿真计算机解算弹体动力学模型得到的导弹的飞行姿态。
仿真时,仿真计算机接收外部舰艇与目标运动信息,执行仿真软件,经422 串口输出姿态信号给转台控制计算机,控制三自由度转台复现导弹在俯仰、航向、倾斜3个方向上的姿态,同时安装在转台上的陀螺仪敏感导弹姿态,经过A/D转换或232串口回送给仿真机的制导控制模块,实现闭环控制,从而使陀螺仪作为仿真实体进入导弹的控制回路,实现半实物仿真。半实物舰空导弹仿真部分的结构原理图如图1所示。
②虚拟舰空导弹。虚拟舰空导弹部分包括3枚虚拟的舰空导弹。其中,每枚虚拟舰空导弹由虚拟导弹仿真计算机、导弹运动学与动力学数学模型、舵机数学模型、无线电指令收发数学模型、导引头数学模型和制导控制模块等6部分组成。虚拟舰空导弹模型实现的功能有:完成导弹的运动参数解算、全弹道制导控制、无线电指令收发等功能。
4)目标部分。目标部分包括2枚低空飞行的反舰导弹。其中,每枚反舰导弹由质心运动学数学模型、导引头搜索跟踪数学模型、捷联惯导解算数学模型等3部分组成。反舰导弹模型的功能是:完成反舰导弹初始参数设定与运动参数解算、导引头搜索舰艇编队与跟踪舰艇等功能。
5)视景仿真部分。视景仿真部分由视景仿真计算机、投影仪、幕布和仿真软件组成,模拟天空、大海等战场环境,生成舰艇、预警机、直升机、舰空导弹、目标等对象实例,并实时接收仿真系统各仿真实例的运动参数信息,通过视景仿真技术以立体三维的形式将整个协同制导作战过程予以呈现。
6)仿真系统控制部分。仿真控制部分由主控仿真计算机和控制软件组成,完成对整个分布式半实物仿真系统的剧情设定和各模型参数的初始化,实现模型间的信息交互与数据、时间管理,并对仿真系统监控,实时掌握系统工作状态,进行协调控制,同时记录仿真数据,用于系统分析与数据再现。
3 分布式半实物仿真系统方案设计
本文基于分布交互仿真的主流技术HLA 高层体系结构来设计仿真系统方案。即将整个仿真系统看为一个联邦,每个计算机节点作为一个联邦成员,联邦成员通过向运行支撑环境 RTI(Run Time Infrastructure)请求服务加入联邦,并生成各自的对象实例,由RTI 实现对整个仿真系统的联邦管理、声明管理、对象管理、所有权管理、时间管理和数据分发管理。基于HLA 设计的半实物分布式仿真系统方案如图2所示。
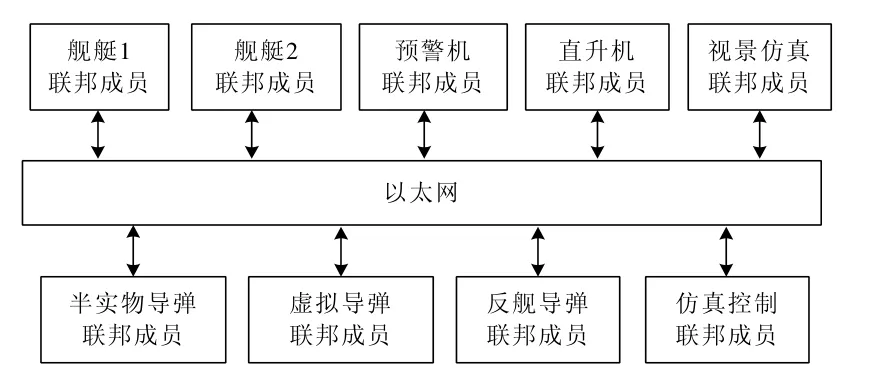
图2 基于HLA的分布式半实物仿真系统设计方案图
图2中,仿真系统由舰艇1 联邦成员、舰艇2联邦成员、预警机联邦成员、直升机联邦成员、半实物导弹联邦成员、虚拟导弹联邦成员、反舰导弹联邦成员、仿真控制联邦成员和视景仿真联邦成员等9个联邦成员组成。
舰艇联邦成员、预警机联邦成员、直升机联邦成员、半实物导弹联邦成员、虚拟导弹联邦成员和反舰导弹联邦成员,通过对象实例属性的公布/订购来模拟完成探测制导平台对目标的探测制导、探测制导平台之间的数据链传送、制导平台与舰空导弹之间的无线电指令收发、制导平台的协同制导交接和舰空导弹导引头对目标的搜索跟踪等功能;通过对交互实例的公布/订购来模拟目标发现跟踪、舰空导弹发射、舰空导弹截获、中末交班开始结束、导引头开机、目标截获跟踪、爆炸或坠海等交互动作。这些功能由反舰导弹对象实例的运动学模型,舰艇对象实例的探测制导模型、指控模型、无线电收发模型、制导指令交接控制模型,预警机或直升机对象实例的探测制导模型、无线电收发模型、制导指令交接控制模型,舰空导弹实例的无线电收发模型和导引头模型等实现。
视景仿真联邦成员订购舰艇1 联邦成员、舰艇2 联邦成员、预警机联邦成员、直升机联邦成员、半实物导弹联邦成员、虚拟导弹联邦成员和反舰导弹联邦成员的位置、速度、姿态等信息,从而实现对作战过程的三维视景显示。
仿真控制联邦成员订购各联邦成员信息,实现对整个仿真系统的监视和控制,并设定仿真系统采用步进的时间推进方式;半实物导弹联邦成员为时间控制非时间受限成员,其他联邦成员为时间受限非时间控制成员。
4 方案设计的具体实现
4.1 关键问题分析
所设计的仿真系统方案在具体实现时存在2个关键问题:一是半实物仿真对实时性的要求;二是半实物仿真与分布式仿真的互操作问题。
1)半实物仿真的实时性。仿真系统要体现导弹的制导控制特性,对仿真步长时间有严格要求[10-11],一般为1~10 ms,而通用的操作系统(如Windows 2000、Windows XP 等操作系统)为分时操作系统,不能实现数据的实时采集与输出,调度时间为几十个ms,并且不确定、不可知,这对于半实物仿真来说是不可接受的,实物硬件必须由实时的操作系统来驱动和管理,并要求响应时间小于ms 一个数量级。
2)半实物仿真与分布式仿真的互操作。分布式仿真由HLA的运行支撑环境RTI 实现仿真系统各联邦成员的通信,完成信息交互功能,其开发环境是Visual Studio,联邦成员采用C++代码调用RTI服务来实现成员间的信息订购与公布。而半实物仿真运行在实时操作系统上,不同于通用的分时操作系统,不能安装RTI 这个网络管理系统,无法通过编辑C++代码直接调用RTI 服务来实现与外部的信息交互。
4.2 具体实现方案
1)半实物实时仿真机。按计算机的体系结构、运行环境、功能以及服务对象等对操作系统进行分类,操作系统均属于下列操作系统之一或它们的组合:单用户操作系统(如MS-DOS)、批处理系统(较早)、分时系统、实时系统、网络操作系统、嵌入式操作系统和多处理机操作系统[12]。下面对分时系统与实时系统进行分析。
①分时系统。分时系统中的分时概念是将主计算机CPU的运行时间分割成一个个长短相等(或者基本相等)的微小时间片,把这些时间片依次轮流地分配给各个终端用户的程序执行,每个用户程序仅仅在它获得的CPU时间片内执行。当时间片完结,用户又处于等待状态,此时CPU 又在为另一个用户服务。用户程序就是这样断断续续,直到最终完成执行。虽然在微观上用户程序的执行是断续的,作业运行是不连续的,但是在宏观上,用户的任何请求服务总能够及时得到响应。通常所用的Windows系列的操作系统和Linux系统都为分时系统。
②实时系统。实时系统主要应用于需要对外部事件进行及时响应并处理的领域。实时含有立即、及时的意思。所以,对时间的响应是实时系统最关键的因素。实时系统是指系统对输入的及时响应,对输出的按需提供,无延迟的处理。换句话说,计算机能及时响应外部事件的请求,在规定的时间内完成事件的处理,并能控制所有实时设备和实时任务协调运行。
实时操作系统可以分成两类。
a.实时控制系统:通常是指以计算机为中心的生产过程控制系统,又称为计算机控制系统。在这类系统中,要求实时采集现场数据,并对它们进行及时处理,进而自动地控制响应的执行机构,使某参数(温度、压力、流量等)能按预定规律变化或保持不变,以达到保证产品质量、提高产量的目的,包括自动数据采集、生产过程监测、执行机构的自动控制等等。也可以用于监测制导性控制,如武器装备的制导、交通控制、自动驾驶与跟踪、导弹火箭与航空航天器的发射等。
b.实时信息处理系统:通常是指对信息进行实时处理的系统。这类系统要求及时接收从终端(包括远程终端)发来的服务请求,按请求的内容对信息进行检索和处理,并在很短的时间内为用户做出正确的回答。典型的实时信息处理系统有证券交易系统、航空订票系统、情报检索系统、信息查询系统等。
目前流行的实时操作系统有:Vxworks、pSOSystem、VRTS、LynxOS、OS-9、Nucleus PLUS、CMX RTOS、RTXC和QNX。还有一些实时性不太高的“软”实时操作系统,如Windows Embedded 产品家族、PalmOS、EPOC、Embedded Linux 等。其中,Vxworks是风河公司开发的一种实时操作系统,它以良好的可靠性和卓越的实时性广泛应用在通信、军事、航空、航天等领域。现在大多数的半实物仿真计算机都采用Vxworks 实时内核,实时性达到了µs级,充分满足课题仿真系统对实时性的要求。为此,采用一台以Vxworks为内核的半实物实时仿真机作为半实物导弹仿真机,而其他联邦成员仿真机采用通用机,系统为Windows XP。
2)半实物仿真代理联邦成员。为解决半实物仿真与分布式仿真的互操作问题,在仿真系统中增加一个半实物仿真代理联邦成员,采用通用计算机,系统为Windows XP 操作系统。半实物仿真代理联邦成员与联邦其他成员间通过调用RTI 服务实现信息的交互;由于半实物仿真机无法安装RTI分布式软件,半实物仿真代理联邦成员与半实物仿真机之间采用UDP协议,通过网口实现信息的交互。即半实物仿真代理联邦成员是半实物导弹仿真机与分布式仿真系统的连接纽带,如图3所示。
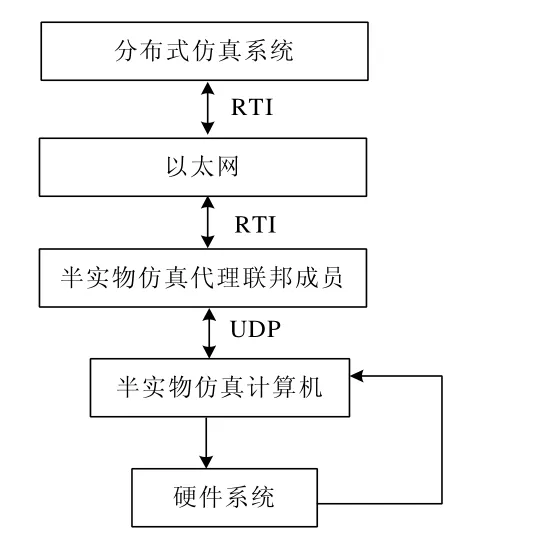
图3 半实物与分布式互操作实现图
在仿真运行时,半实物仿真代理联邦成员通过调用RTI 服务订购半实物导弹所需的外部信息(即舰艇、预警机、直升机和目标的位置、速度信息),半实物仿真机通过网口,采用UDP协议从半实物仿真代理联邦成员处接收这些信息;同时,半实物仿真机又通过网口,采用UDP协议将本身的位置、速度、姿态信息发送给半实物仿真代理联邦成员,半实物仿真代理联邦成员通过调用RTI 服务公布半实物导弹运动信息,其他联邦成员就可以通过调用RTI 服务获得这些信息。同理,半实物导弹与分布式仿真系统之间也可以实现交互实例信息的发送与接收。
5 结论
本文针对舰舰协同和空舰协同这两种典型的协同制导舰空导弹作战模式,基于HLA 这一主流分布式仿真技术,设计了一套超视距协同制导舰空导弹作战分布式与半实物仿真系统,可用于舰空导弹超视距拦截低空反舰导弹的复合制导关键技术和其他协同制导有关关键技术的实验室验证等工作。
[1]周彦,戴剑伟.HLA仿真程序设计[M].北京:电子工业出版社,2002:2-10.
[2]张德源.舰空导弹超视距反导作战研究[J].飞航导弹,2007(12):15-18.
[3]RICHARD SCOTT.Joining the dots:networked platforms extend airdefence[J].Jane’s navy international,2005(12):26-30.
[4]WIFIAM H ZINGER,JERRY A KRILL.Mountain top:Beyond-the-horizon cruise missile defense[J].Johns Hopkins APL technical digest,1997,18(4):501-520.
[5]曹志敏,杜阳华,曾清.潜艇武器系统综合仿真系统及关键技术[J].计算机仿真,2007,24(6):31-33.
[6]黄鎏鑫.基于HLA的巡航导弹分布式交互视景仿真[D].武汉:华中科技大学,2004.
[7]郭齐胜,董志明,李亮,等.系统建模与仿真[M].北京:国防工业出版社,2007:7-17.
[8]李皓.基于HLA的鱼雷武器系统分布交互仿真研究[D].西安:西北工业大学,2003.
[9]赵永涛.舰空导弹作战接力切换式制导交接方案设计[J].飞行力学,2011,29(1):50-53.
[10]单家元,孟秀云,丁艳.半实物仿真[M].北京:国防工业出版社,2008:25-36.
[11]吴进华,马培蓓,王士星.反舰导弹半实物仿真软件系统设计[J].计算机仿真,2004,21(7):8-10.
[12]徐惠民.基于Vxworks的嵌入式系统及实验[M].北京:北京邮电大学出版社,2006:57-68.
猜你喜欢
中学生数理化·七年级数学人教版(2022年3期)2022-03-16
电子制作(2018年1期)2018-04-04
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
现代防御技术(2016年1期)2016-06-01
制导与引信(2016年3期)2016-03-20
北京航空航天大学学报(2016年4期)2016-02-27
舰船电子工程(2015年8期)2015-03-14
太空探索(2014年1期)2014-07-10
现代防御技术(2014年5期)2014-02-28
