最短路径Auction算法及其在路径诱导中的应用*
2012-03-09 08:14
武汉理工大学学报(交通科学与工程版) 2012年6期
(东南大学交通学院 南京 210096)
0 引 言
在路径诱导模块中,最短路径算法成为决定导航性能的关键因素[1].常用的最短路径算法可分为两类:标号设定算法(如Dijkstra算法)和标号修正算法(如Bellman-Ford算法).以上2类算法在应用于最短路径问题时,都是通过先推出指定起始结点到达其余各点的最短路径,再通过终点反向追踪的方法求解起终点之间最短路径的.这样的求解思路显然产生了多余的求解信息.当驾驶员在道路网络中行车时,通常关注的仅是从所处位置到达预定目的地2点之间的最短行车路线.寻求更加符合路径诱导需求的路径算法、提高算法的针对性,成为导航系统关注的焦点.
Auction算法(拍卖算法)于1991年由Bertsekas应用于网络最短路径问题[2].值得关注的是,Auction算法是一种能够直接求解“点对点”之间最短路的路径算法.因此,本文将就该算法在路径诱导中的应用作进一步的讨论.
本文将路径诱导中的“点对点”最短路径问题,根据比较试验讨论算法的复杂性以及影响算法速度的主要因素,评价其在路径诱导中的适用性.
1 Auction算法的基本原理
1.1 算法原理
Auction算法是模仿现实中的拍卖过程.考虑如下拍卖过程:有n个人和n个物体,遵循“一对一”的原则,实现派对.假设物体j的价格为pj,要得到这一物体的人必须支付相应的价钱.人i与物体j派对可以获得的效益为aij,纯利润为aij-pj.每个人想获得使他获利最大的那一个物体ji,即aiji-pji=max{aij-pj}.因此必须通过竞争和抬高价格,选择获益最多的那个物体.经过十几年的发展,这种算法已经推广用于解决一般的最小费用路径问题,择优条件也相应地发生了改变,成为较为解决线性网络流的综合性算法,也是近年来较新也较为受到关注的最短路径算法.
对于一幅赋权有向图,Auction算法是一种能够求解单一起点和单一终点的最短路问题的简单方法.这一特点恰恰满足了路径诱导技术中的最短路求解需求.Auction算法在求解过程中,始终维持一条从起点出发的简单路径P.算法的每一步对路径P中最后一个结点采取的“延伸”或“收缩”操作.当路径P的最后一个结点到达指定终点时,算法结束,且两点之间的最短路径得出.
为了直观的反映Auction算法的迭代过程,Bertsekas将算法过程比喻为“在迷宫中移动的小鼠”.小鼠在迷宫中移动,或者向未知区域前进,或者沿曾经走过的路线返回.每当小鼠从一个岔路口(结点)沿原路返回时,将记录一个估计值,作为重新回到该结点时的期望值;每当小鼠在向前探索时,根据对结点估计值的比较,选择一个期望最优的结点作为前进目标.在如此的前进与返回的过程中,直至找寻到迷宫中的目的地(终点).由此反映出,Auction算法是一种从起点向终点迭代的探索性算法.
1.2 算法的基本步骤[3]
在给定一个有向网络G(V,E)中,V,E分别为G的点集合和弧集合,弧段(i,j)的费用为aij.首先,对算法作如下基本假设:(1)假设网络中的弧段费用均为正值;(2)假设除终点外的每一个结点至少有一条前向弧,对于不满足条件的结点,可增加一条指向终点的弧,并赋给它一个很大的弧费用;(3)假设两个结点间在一个方向上最多有一条弧连接(这一点仅仅是为了方便表述,拍卖算法能很好地解决一对结点间有多条弧连接的情况).
下面描述最短路径求解过程:用1表示起点,t表示终点,(i1,i2,…,ik)表示一条路径.其中:(im,im+1)表示弧(m=1,…,k-1).如果i1,i2,…,ik是各不相同的,则称(i1,i2,…,ik)为初等路,结点ik为路径的终点,所有弧的费用之和就是路径的长度.
定义P为迭代路径,在迭代过程中,P=(i1,i2,…,ik)始终保持为初等路,并不断延伸和收缩.如果ik+1不是路径P 中的结点,并且(ik,ik+1)是一条边,则用结点ik+1来延伸P,是指用路径(i1,i2,…,ik,ik+1)来代替路径 P;如果路径 P不只包含起点i1,收缩P 是指用路径(i1,i2,…,ik-1)代替路径P.
定义p=(p1,p2,…,pn)为网络中结点的价格矢量,其中元素与网络结点一一对应,例如pi表示第i个结点的价值量.在迭代过程中,价格矢量p需满足如下条件:
pi≤aij+pj∀(i,j)∈E;pi=aij+pj
对于路径P上所有连续的结点对,这一条件称作松弛互补性条件(complementary slackness,简称CS条件),这与指派问题Auction算法的CS条件等价,并且,都可以由最小费用流问题的CS条件推导出来.可以证明,如果(P,p)满足CS条件,i是路径P中的结点,则从起点1沿P到结点i的路径也是从1到i的最短路,并且p1-pi就是相应的最短路长度.
根据Auction算法求解最短路径的过程,其“拍卖原则”体现于路径迭代的每一步中.在最短路径问题中,以aiji+pji=min{aij+pj}取代原始拍卖问题中条件aiji-pji=max{aij-pj}.在路径P延伸的过程中,将符合条件aiji+pji=min{aij+pj}的结点ji分配给上游结点i,即以结点ji延伸路径P,有在路径P收缩时,以min{aij+pj}更新价值量pi,记录该结点的估计值,便于路径P再次延伸时的回溯.这便是最短路径Auction算法中的拍卖原理.
为了使用计算机语言实现Auction最短路径算法,现给出算法的程序化描述(见图1).对于符合基本假设的道路网络,求解从起点1到任意点i的Auction算法的基本步骤如下.
1)初始化(P,p) P= (1),pj=0,j∈V.
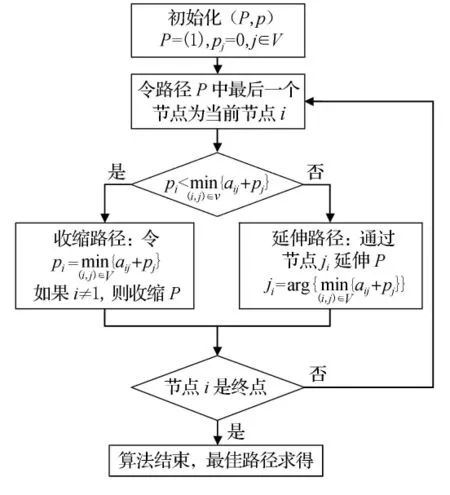
图1 Auction算法流程图
2)用i表示路径P的最后一个结点.如果pi<min {aij+pj},进入下列步骤(1),否则进入(i,j)∈v步骤(2):(1)收缩路径.令如果i≠1,收缩P,转到下一个迭代过程;(2)延伸路径.通过结点ji来延伸P,ji=arg{min{aij(i,j)∈V+pj}}.如果j是终点t,则迭代终止,P就是要求的最短路径.否则转入下一个迭代过程.
3)重复步骤2),直到算法推出.
1.3 算例
为了清楚的说明问题,本文采用了一幅简单的有向网络图,如图2所示,通过求解结点1至结点4的最短路径,演示Auction算法在求解网络最短路径时的迭代过程,见表1.
图3反映了在使用Auction算法求解上述最短路径问题时,路径P末节点的移动轨迹,反映了路径延伸和收缩的过程.
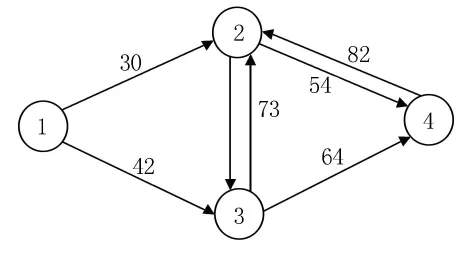
图2 简单的赋权有向网络图
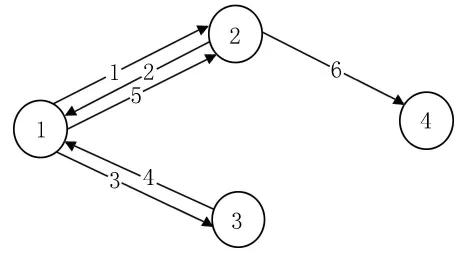
图3 路径P末结点的移动轨迹
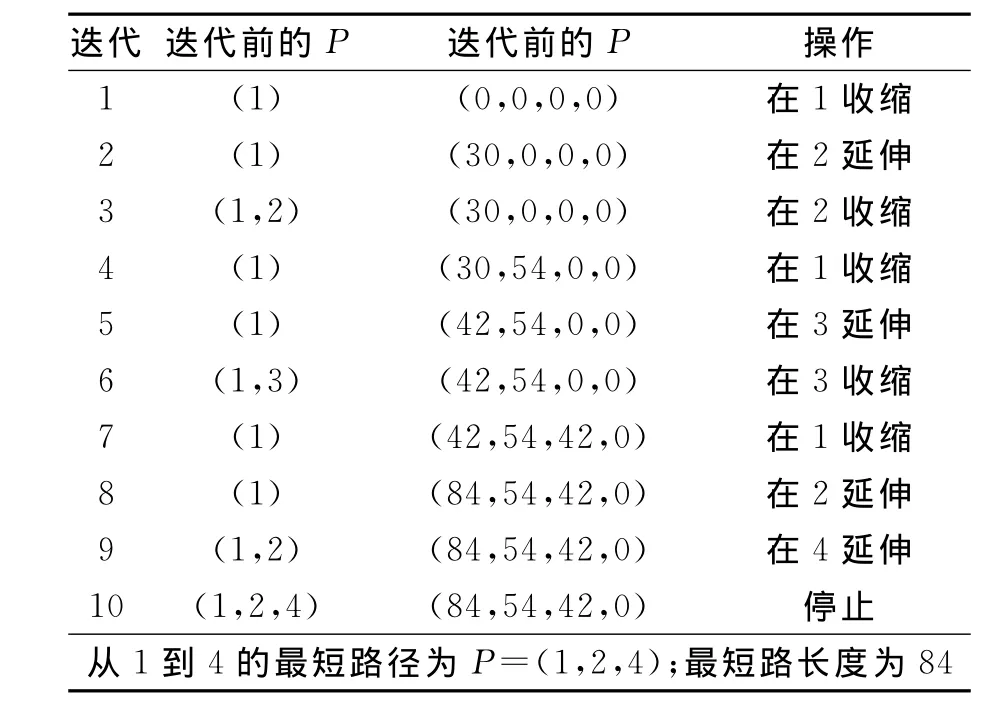
表1 Auction算法求解结点1到4最短路的迭代过程
2 “点对点”的最短路径问题
2.1 Auction算法的运算性能分析
最短路径算法的运算性能主要体现为算法的准确性和复杂性.为了进一步反映Auction算法在计算道路网络中“点对点”最短路径时的运算性能,本文采用了随机生成的赋权有向网络,对Auction算法的运算速度和运算准确性进行了测试(CPU Intel 1.76GHz),并选用了经典的Dijkstra算法作为参照.测试程序采用C#语言编写,考虑到路径诱导系统的硬件环境,程序使用了单线程的前向的拍卖算法(forward algorithm).比较测试在不同规模(结点数量规模、路段数量规模)的网络中进行,以测试算法的准确性和运算时间为主,对两种不同的算法选用相同的起终点进行测试试验.根据Auction算法的迭代特点,进行有针对性的测试,得出定量的数据分析,反映出算法的主要特点和结果随参数变化的趋势.
Auction算法的复杂度可以表示为O(EhL).h表示起点1到终点t之间最短路径的最小路段数;L表示网络中路段费用的最大值.E=I×G.其中,I表示从起点1出发,路径长度小于起终点间最短路径长度的结点i的数量;G表示上述结点i的最大结点出度.由此可见,影响Auction算法运算速度的主要因素为h,L,I,G几个参数.根据算法的复杂度分析,本文选择起、终点间隔(最短路路径所经过结点的数目)、网络平均结点出度(路段密度)、网络结点数作为主要试验参数,对于Auction算法的运算性能做出测试.具体试验过程如下.
1)根据随机网络生成方法,产生结点数量分别为500,1 000,2 000,5 000,10 000的5种规模的道路网络.
2)对于每种结点数量的网络,产生结点平均出度分别为2,3,4的3种路段密度不同的网络.其中,结点的平均出度为2,表示一种稀疏的网络结构;平均出度为4,表示密集的网络结构.按照这样的方法,共产生15幅随机网络.
3)在这15幅网络中,分别测试Auction算法和Dijkstra算法.每幅随机网络,随机产生100对起终点,对这100对起终点分别使用Auction算法和Dijkstra算法,记录算法的结果及性能(最短路径时间、最短路径、起终点间隔、算法运行时间).通过算法运行时间,反映算法的复杂程度.
4)对于测试结果,以结点数量分为5大类,以路段数量分为3个次类,进行比较分析.
总体来说,由具有代表性的试验结果发现,2种最短路径的运算结果相同,对于所有的起始点对,都能够通过迭代得到相同的最短路径.因此,可以说明,两种基本算法的准确性相同.但是,在不同规模的网络中,Dijkstra算法均表现出了速度上的优越性.如图4所示,两种计算方法的运算速度都是随着网络规模的增加而降低的,Auction算法的速度受网络中结点总数的影响较大,Dijkstra算法则受网络中路段总数的影响较大.
此外,Auction算法受起终点间隔影响明显,其运算时间基本随起终点间最短路径结点数量增加呈递增趋势.运算时间呈现波动,在个别点处有下降,如图5所示,根据试验数据分析,造成下降的原因是该最短路径总时间相对较小,在路径P延伸时易于被优先选择.这样的测试结果,是符合Auction算法复杂性分析的.Auction算法仅在起终点间隔较短时,速度上优于Dijkstra算法.这种现象在如图5所示的大型网络中更为明显.随着路径结点数量的增加,Auction算法迭代的次数将明显增加,运算速度也明显低于Dijkstra算法.
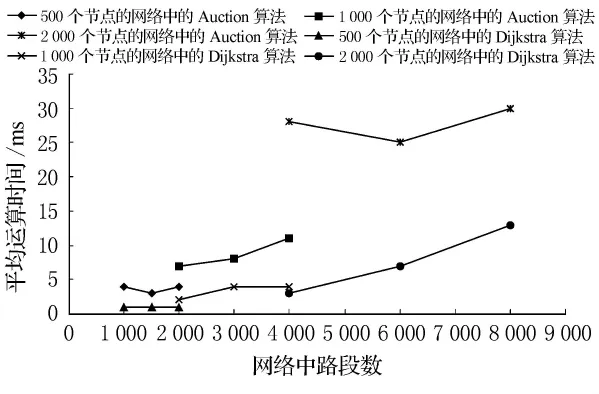
图4 包含500个结点、1 000个结点和2 000个结点的网络中,2种算法运算速度比较

图5 包含10 000个结点的网络中,2种算法运算速度的比较
2.2 在路径诱导中的适用性
根据路径诱导设备的技术参数要求[4],对于现行导航设备中,其存储空间已经达到了比较高的容量,但处理器主频速度和内存空间大小,还不能与一般的个人计算机相提并论.参考测试程序对运算速度要求高,对内存空间需求适中的特点,算法的速度应当作为首要考虑因素,其次考虑数据的存储空间问题.因此,将最短路径算法的运行时间控制在1s以内是比较合适的,也是用户可接受的速度.从上一节对于Auction算法性能的测试和算法复杂度的讨论中发现,算法能够准确的求解网络中任意两点之间的最短路径,但是在运算速度方面却与Dijkstra算法有着明显的差异.Dijkstra算法在所有的测试网络中,都能够将计算控制在极短的时间以内(<0.5s),因此它具有普遍的适用性.Auction算法的速度主要受到起终点间隔的影响,仅在最短路径结点数量较少时,能够体现出其运算速度的优势.随着迭代距离的增加,Auction算法的复杂性迅速提高,运算速度明显下降,低于Dijkstra算法.Auction算法在实际“点对点”最短路问题的应用中,没有明显地体现出其算法原理优势,反而在整体性能上低于传统标号路径算法.因此,单线程的Auction算法在路径诱导中的适用范围较为有限,算法的计算步骤有待优化和改进.
3 结束语
尽管Auction算法已经在交通分配中,求解单一起点到多个终点的问题,以及多处理器的并行计算中,得到了很好的应用[5],但是作为以“点对点”最短路径为求解目标的算法,单线程的Auction算法并没有在导航系统的“一对一”问题中体现出其原理上的优势[6-8].即 Auction算法具有准确求解网络中最短路径的能力,可是仍然存在速度方面的局限性,仅适用于大型稀疏网络结构,或求解起终点间隔较少的最短路问题.因此,Auction算法的整体平均速度较传统的Dijkstra算法偏低.
综述之,仅仅是依照当前的算法步骤和单线程的算法程序,无法达到预期的算法效率.通过对于Auction算法的反复试验,可以发现,在算法的求解过程中,最费时的是每步迭代中对当前下游结点最小费用的计算.利用算法迭代过程中的性质,减少迭代过程的重复步骤,将有希望降低算法复杂性,提高算法的实际效率.此外根据文献[3],双(多)线程的Auction算法采用双(多)处理器,在共用价格矢量的基础上,可同时从起点和终点开始延伸路径.考虑使用双处理器的路径诱导设备,能够发挥Auction算法在多处理器上并行计算的优势,将显著地提高算法的求解速度.
[1]张 可.车辆导航系统关键技术研究[D].北京:北京工业大学,2001.
[2]王京元,程 琳.最短路拍卖算法在交通分配中的应用[J].交通运输系统工程与信息,2006,6(6):79-82.
[3]BERTSEKAS D P.An auction algorithm for shortest paths[J].SIAM J.for Optimization,1991(1):425-447.
[4]王 芬.Dijkstra最短路径优化算法在汽车导航的研究及实现[D].上海:上海师范大学,2006.
[5]BERTSEKAS D P,CASTANON D A.The auction algorithm for the transportation problem[J].Annals of Operations Research,1989,20(1):67-96.
[6]LEONE R D,PRETOLANI D.Auction algorithms for shortest hyperpath problems[R].Technical Report OR-CAM-1998-01,Universit′a di Camerino,1998.
[7]BERTSEKAS D P,PALLOTTINO S,SCUTELLA M G.Polynomial auction algorithm for shortest paths[R].Technical Report TR-16/92,Dipartimento di Informatica,University of Pisa,1992.
[8]PALLOTINO S,SCUTELLA M G.Shortest path algorithms in transportation models:classical and innovative aspects[EB/OL].http://ftp.di.unipi.it/pub/techreports/TR-97-06.ps.Z,1997-06-25.
猜你喜欢
中学生数理化(高中版.高考数学)(2022年1期)2022-04-26
电子制作(2022年1期)2022-01-28
电子制作(2021年14期)2021-08-21
数学小灵通(1-2年级)(2020年6期)2020-06-24
中学生数理化·八年级数学人教版(2017年2期)2017-03-25
作文大王·笑话大王(2016年6期)2016-06-22
作文大王·笑话大王(2016年4期)2016-04-27
作文大王·笑话大王(2016年3期)2016-03-11
作文大王·笑话大王(2016年1期)2016-02-24