
可变形电子元件的非线性动力屈曲行为分析*
2012-02-26 06:33张晓晴欧智成
爆炸与冲击 2012年4期
张晓晴,欧智成
(华南理工大学土木与交通学院,广东 广州510640)
可变形电子技术在微电子、生物、医学等领域有广阔的应用前景[1],它以硬质薄膜、柔性基底结构为基础,将薄膜粘附在已施加预应变的基底上,然后释放预应变,致使薄膜发生屈曲[2]。将薄膜/基底结构的屈曲特性应用于半导体纳米技术中,便可实现电子元件的可变形特性。R.Huang 等[3-6]建立了薄膜基底结构的力学模型,研究了各向同性、正交各向异性的弹性薄膜在弹性、粘性和粘弹性基底上的屈曲行为,得到了薄膜屈曲的波长、波幅和临界荷载等。B.Audolya 等[7]、X.Chen 等[8]、J.Song 等[9]研究了包括人字形、棋盘形、波浪形等多种受到双轴预应变荷载的薄膜屈曲构型。文献[10-12]中研究了有限窄带薄膜的屈曲,并考虑了大变形和超弹性的情况。
当前的研究主要集中在静力屈曲方面,并未考虑结构的动力响应,事实上无论是在生产还是使用过程中,可变形电子元件都不可避免地会承受各种动力荷载的作用。这些荷载可能来自化学反应、机械碰撞、环境温度等,并最终体现在薄膜/基底结构受到的随时间变化的荷载。一般而言,这些荷载包括线性荷载、阶跃荷载、脉冲荷载、周期荷载和随动荷载等,原来的静力屈曲问题转化为与时间相关的动力屈曲问题。动力屈曲同静力屈曲分析一样,需要确定临界荷载和屈曲模态等,但动力屈曲有更丰富的动力响应,包括冲击屈曲、振荡屈曲等,而且对初始条件敏感[13-14]。
本文中,分析线性荷载下薄膜/基底结构的动力屈曲。假设薄膜受到线性递增的单轴预应变,利用Kirchhoff 平板理论描述薄膜,用小变形平面应变理论描述基底,导出薄膜的应变能和动能,以及基底对薄膜所作的功。然后定义Lagrange 函数,利用Euler-Lagrange 方程导出动力屈曲控制方程。通过量纲一化后,得到一个关于屈曲波幅和线性荷载的非线性常微分方程。通过数值方法求解结构的动力响应,并利用B-R 准则确定临界屈曲荷载[15],最后讨论初始条件对动力响应的影响。可以发现,动力屈曲的临界荷载较静力屈曲的大,波幅响应围绕静力屈曲的振荡。
1 基本模型和控制方程
弹性薄膜无滑移地粘附在弹性基底上,薄膜厚度为h,基底厚度为H,且H≫h。基底受到单轴预拉伸应变ε0,以此时的构型为初始构型,以接触面的中心为原点建立坐标系,如图1(a)所示。释放基底的预应变,结构发生屈曲,如图1(b)所示,假设在此过程中薄膜受到线性变化的压缩应变ε(t)。用Kirchhoff 平板理论描述薄膜,用小变形理论描述基底。由于结构在y 方向的长度远大于波长,因此基底可简化为平面应变问题。薄膜与基底接触面处(z=0)的位移连续,基底底部固定,即边界条件为

式中:上标s 表示基底。
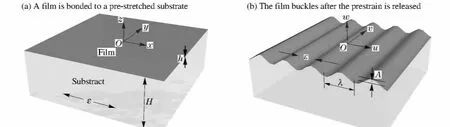
图1 硬质薄膜/柔性基底结构Fig.1 The structure in a stiff thin film bonded to a compliant thick substrate
1.1 薄膜
由于薄膜只受到单轴荷载,其基本方程可简化为一维情况,并考虑中等应变

式中:u0和w0分别表示薄膜中面上的面内位移和挠度。Kirchhoff 平板理论认为薄膜挠度沿着厚度方向无变化,等于中面挠度。但面内位移沿着厚度线性分布。于是薄膜任意位置的位移为

运用Hooke 定律得到薄膜中面的应力


将式(2)~(4)代入式(5),得到位移表示的平衡方程

假设薄膜的挠度

式中:A(t)为波幅,k 为波数。假设薄膜的波长与时间无关,并且远大于厚度,λ=2π/k≫h,即kh≪1。将式(7)代入式(6)解得中面位移

于是接触面处的位移

再由式(2)得薄膜的面内应变

薄膜的应变能包括弯曲应变能Ub和压缩应变能Um,即


本文中,上标“·”表示对时间的一阶导数。
1.2 基底
计算基底对薄膜的反力。由小变形平面应变理论得基底应变

运用Hooke 定律(平面应变)得到应力

式中:Es和νs为基底的杨氏模量和泊松比。利用平衡方程

将式(13)~(14)代入式(15),得到位移表示的平衡方程

分离变量得到

式中:下标“,”表示对坐标的偏导数。考虑位移的周期性和有界性,得到微分方程的通解为

利用边界条件(1)解得


注意到基底的预应变ε0被完全释放。再式(19)代入式(14),得到接触面上的应力

忽略高阶项和小量后得到基底对薄膜的作用力


1.3 动力屈曲控制方程
定义Lagrange 函数

式中:薄膜应变能Ue=Ub+Um。将式(11)~(12)、(22)代入,得

考虑挠度的周期性,将式(7)、(10)代入式(24),计算一个周期内的平均值,得到


将式(25)代入,整理得到


忽略式(27)中的惯性项12ρ hA″(t),则得到静力屈曲的控制方程。联立式(28)解得静力屈曲时的平衡波数

将式(29)代入式(28)并令A=0,解得静力屈曲的临界荷载(预应变)

假设薄膜动力屈曲中平衡波数不变,把式(29)代入式(27)得到


其中

2 动力屈曲
假设单位预应变随时间增长如下

式中:c 为变形率;τ 有两重意义,一为量纲一时间,二为当前应变较静力屈曲临界应变的相对增量。将式(33)代入式(31)得到线性荷载下的动力平衡微分方程为,或写成

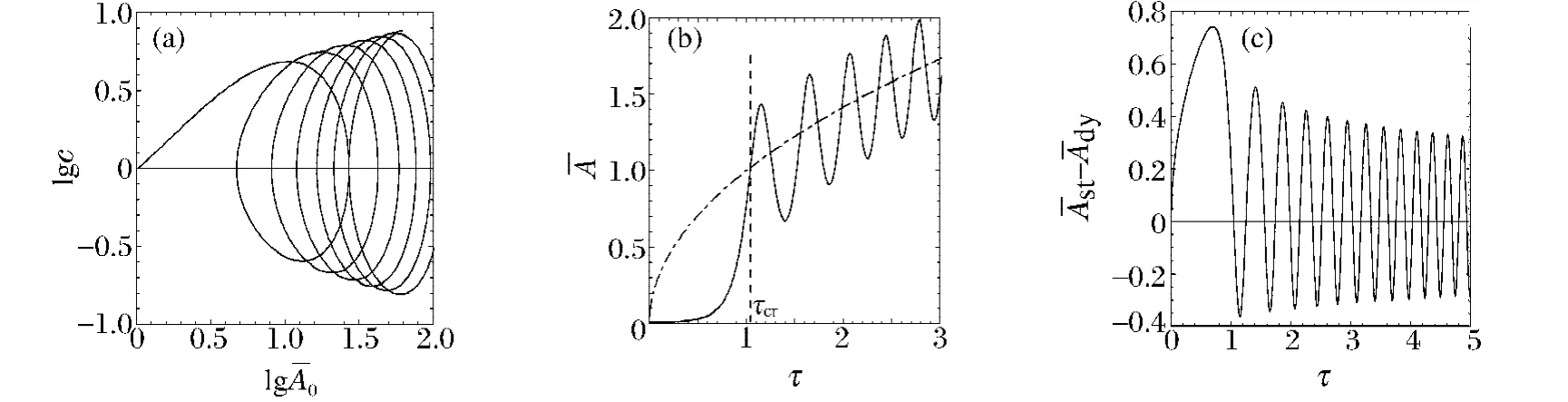
图2 动力响应Fig.2 Dynamic response
利用B-R 准则确定动力屈曲临界荷载[15],即波幅响应第1 个拐点处。由式(34)得到临界荷载满足,即动力屈曲的临界荷载为动力屈曲与静力屈曲波幅响应的交点。由图2(b)~(c)可知,在动力波幅的第1 个极值点处,动力屈曲的波幅对静力屈曲的波幅的增幅最大,之后随着荷载的增大,增幅减小。定义动力屈曲波幅增长系数,表示第1 个极大值处二者的比值。
3 讨 论
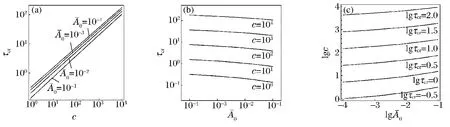
图3 动力屈曲临界荷载Fig.3 The critical load in dynamic buckling
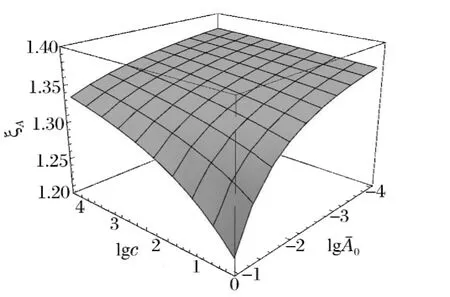
图4 动力屈曲波幅增长系数与初始挠度和应变率的关系Fig.4 The relationship among the increment ratio of dynamic buckling amplitude,initial amplitude and strain rate
4 结 论
基于Kirchhoff 平板理论以及Euler-Lagrange 方程导出薄膜、基底结构的动力屈曲控制方程,分析该结构在线性荷载下的动力特性。随着线性荷载的增大,波幅的动力响应先是缓慢增长,然后发生突变,最后围绕静力屈曲的路径振荡,并且波幅的峰值较静力屈曲的要大。动力屈曲受到初始挠度和应变率的影响,应变率越大,初始挠度越小,则临界荷载以及动力屈曲的波幅增幅也越大。当柔性电子元件受到的荷载较大时,结构可能发生二次屈曲,文中对基底的小变形假设也不再适用。
[1] Wong W S,Salleo A.Flexible electronics:Materials and applications[M].New York:Springer,2009.
[2] Khang D Y,Jing H Q,Huang Y,et al.A stretchable form of single-crystal silicon for high-performance electronics on rubber substrates[J].Science,2006,311(5758):208-212.
[3] Huang R,Suo Z.Instability of a compressed elastic film on a viscous layer[J].International Journal of Solids and Structures,2002,39(7):1791-1802.
[4] Huang R.Kinetic wrinkling of an elastic film on a viscoelastic substrate[J].Journal of the Mechanics and Physics of Solids,2005,53(1):63-89.
[5] Im S H,Huang R.Evolution of wrinkles in elastic-viscoelastic bilayer thin films[J].Journal of Applied Mechanics,2005,72(6):955-961.
[6] Im S H,Huang R.Wrinkle patterns of anisotropic crystal films on viscoelastic substrates[J].Journal of the Mechanics and Physics of Solids,2008,56(12):3315-3330.
[7] Audoly B,Boudaoud A.Buckling of a stiff film bound to a compliant substrate-Part I:Formulation,linear stability of cylindrical patterns,secondary bifurcations[J].Journal of the Mechanics and Physics of Solids,2008,56(7):2401-2421.
[8] Chen X,Hutchinson J W.Herringbone buckling patterns of compressed thin films on compliant substrates[J].Journal of Applied Mechanics,2004,71(5):597-603.
[9] Song J,Jiang H,Choi W M,et al.An analytical study of two-dimensional buckling of thin films on compliant substrates[J].Journal of Applied Physics,2008,103(1):014303.
[10] Jiang H Q,Khang D Y,Fei H Y,et al.Finite width effect of thin-films buckling on compliant substrate:Experimental and theoretical studies[J].Journal of the Mechanics and Physics of Solids,2008,56(8):2585-2598.
[11] Song J,Jiang H,Liu Z J,et al.Buckling of a stiff thin film on a compliant substrate in large deformation[J].International Journal of Solids and Structures,2008,45(10):3107-3121.
[12] Sun Y G,Choi W M,Jiang H Q,et al.Controlled buckling of semiconductor nanoribbons for stretchable electronics[J].Nature Nanotechnology,2006,1(3):201-207.
[13] Bolotin V V.The dynamic stability of elastic systems[M].San Francisco:Holden-Day,1964.
[14] Lindberg H E,Florence A L.Dynamic pulse buckling:Theory and experiment[M].Dordrecht:Martinus Nijhoff,1987.
[15] Budiansky B,Roth R S.Axisymmetric dynamic buckling of clamped shallow spherical shells[J].NASA Technical Note,1962:597-606.
[16] Huang H,Han Q.Nonlinear dynamic buckling of functionally graded cylindrical shells subjected to time-dependent axial load[J].Composite Structures,2010,92(2):593-598.
猜你喜欢
中学数学研究(广东)(2022年17期)2022-10-09
吉林大学学报(理学版)(2022年5期)2022-09-24
哈尔滨工程大学学报(2022年8期)2022-09-11
哈尔滨商业大学学报(自然科学版)(2022年4期)2022-08-18
建材发展导向(2022年10期)2022-07-28
防爆电机(2022年1期)2022-02-16
昆钢科技(2021年6期)2021-03-09
建材发展导向(2019年11期)2019-08-24
价值工程(2018年25期)2018-09-26
中国现代医生(2017年24期)2017-10-17
