雷达与经纬仪的联合定位方法*
2012-02-10 01:49:06吴能伟
测试技术学报 2012年5期
吴能伟
(长春光学精密机械与物理研究所,吉林长春 130033)
0 引 言
在现代靶场试验中,常用雷达和经纬仪获取高技术兵器武器的外弹道参数(空间坐标、速度、弹道倾角、偏角等),对其攻击性能、毁伤效能进行有效的评估.因雷达的测角精度较低致使其定位精度较差,而经纬仪仅能获取目标的测角信息,加装激光测距后的测量效果不佳[1].虽然 3~4台经纬仪的交会定位精度较高[2],但布设时受试验场地的限制,视场小作用距离有限.因此国外将经纬仪与雷达集成在一起实现单站定位,但其造价昂贵、研制复杂程度较高,而且雷达与电视经纬仪不能分立工作.
在经纬仪附近布设测距雷达获取飞行目标的测角和测距数据,融合两数据得到目标的空间位置具有一定的实际应用价值.文献[3]中的定位模型基于雷达和经纬仪是共面的,在实际中很难满足,存在一定的缺陷.文献[4]中的定位模型也未能给出具体的计算公式和误差分析结果.在分析雷达、经纬仪与目标的几何关系,推导出定位模型的通用计算公式对主要误差来源进行分析,并应用在目标跟踪试验中,其效果良好、具有重要的现实意义.
1 定位模型及误差分析
如图1所示,由雷达和经纬仪构成的联合测量系统,以经纬仪的三轴交点为原点O[5],X轴方向与光电经纬仪的方位角0°平行,Y轴垂直水平面,方向向上.Z轴由X、Y右手坐标系确定.
在O-XYZ坐标系中,目标坐标为M(x,y,z),雷达位于T(),在XOZ平面的投影分别为、.与OX夹角为θ,T1M1∥TM2,雷达的测距信息为R0,经纬仪测量目标的高低角和方位角为E和A.
于是目标定位转化为[6]:已知x1,y1,z1,A,E,R0等参数,解算出目标相对经纬仪的斜距R0,


图1 联合测量系统的坐标关系Fig.1 Coord inate relation of the jointm easuring system
由空间关系易知||=||,||=||= |y1|(若y1=0,与文献[2]的情况一致).在直角三角形 △TMM2中有

联立式(1)、(2),解得

对于远距离目标,显然有0<R1<R0,于是式(3)中R不能取负号,只能取正号,则有[7]


由式(5)可知:①R0增大,即目标距离测量网络越远,雷达测距误差对距离定位误差影响减小;②经纬仪与雷达的基线距离R1越小,则距离定位误差越小;③P越小,距离定位误差越小,在测量基线确定情况下,P的精度取决于经纬仪的测角精度.
2 试验验证
在某型目标测量任务中,经纬仪位于原点O(0,0,0),雷达位于T(834.6,123.3,621.8)(单位为m),目标的发射点为(64 523.5,-216.2,-34 362.7).目标在测量空域内为全被动惯性飞行(即目标没有机动性),经纬仪和雷达在统一时间系统下以20 Hz频率采集目标的测量数据,采用Kalman滤波方法对数据进行校验后送往融合中心[8],融合中心采用反馈式数据融合方法得到目标相对经纬仪的距离信息[9-10],解算出目标的三维位置信息.雷达的测距精度小于3m,经纬仪的测角精度小于5″.将联合定位的位置、单站雷达定位结果与目标的实际飞行位置(GPS差分数据,以X坐标为例)进行比较,得到如图2所示的目标位置曲线,其中ErrR为单站雷达与GPS数据的差值,ErrRP为光电经纬仪与雷达联合定位与GPS数据的差值.
由图2不难看出,在0~26 ms时间段,ErrR和ErrRP的定位误差几乎一样,而在26~80 ms时间段, ErrRP稍大于 ErrR.事后分析得知,目标是由发射点向经纬仪和雷达飞行的,这与2中的分析结论相吻合.因此对于远距离目标,短基线的经纬仪和雷达完全可以实现联合定位.
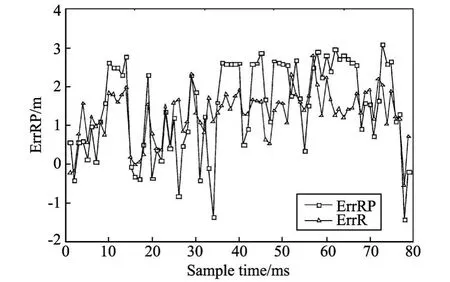
图2 目标的位置误差曲线F ig.2 The Curve of the ob ject position
3 结束语
在雷达和经纬仪组成的测控网络中,在短基线测量时,利用联合定位模型得到目标相对经纬仪的距离误差与雷达测距误差相当.此模型可以有效利用高精度的经纬仪测角数据和雷达测距数据,增加测量设备的实时引导数据,同样适用于目标的事后数据处理,因而具有重要的现实意义.
[1] 刘利生,吴斌,吴正容.外弹道测量精度分析与评定[M].北京:国防工业出版社,2010.
[2] 贾涛,吴能伟,陈涛.光电经纬仪组网测量位置估计Cramer-Rao限[J].光电工程,2005,32(7):4-6,18.
Jia Tao,Wu Nengw ei,Chen Tao.Cramer-rao lower bounds of position estimation in a photoelectric theodolite-based network[J].Op to-Electronic Engineering,2005,32(7):4-6,18.(in Chinese)
[3] 苏建刚,战永红,曾海彬.雷达与光电经纬仪独立布站形成单站定位系统的可行性分析[J].飞行器测控学报,2000, 19(1):1-4.
Su Jiangang,Zhan Yonghong,Zeng Haibin.The feasibility analysis of composing a single station locting system united with radar and op tical-electronic theodo lite[J].FeiXingQi CeKong XueBao,2000,19(1):1-4.(in Chinese)
[4] 卢海波.光电经纬仪与雷达交会测量[J].长春理工大学学报,2003,26(3):92-94.
Lu Haibo.Themethod of intersectionmeasure with E-O theodoliteand radar in different station[J].Journalof Changchun University of Science and Technology,2003,26(3):92-94.(in Chinese)
[5] 何照才,胡保安.光学测量系统[M].北京:国防工业出版社,2002.
[6] 崔旭涛,杨日杰,何友.基于方位-距离量测的舰艇搜潜定位算法研究[J].测试技术学报,2009,23(6):491-495.
Cui Xutao,Yang Rijie,He You.Research on localization algorithm o f ships search antisubmarine based on bearing-range measurement[J].Journalof Test and Measurement Technology,2009,23(6):491-495.(in Chinese)
[7] 张志通.精通MATLAB6.5版[M].北京:北京航空航天大学出版社,2003.
[8] 张兴华,刘超.基于一步异相关法则的kalman滤波抗野值方法[J].测试技术学报,2010,24(5):454-458.
Zhang Xinhua,Liu Chao.Study on restraining outliers of kalman filter based on one step singular correlation law[J].Journal of Test and Measurement Technology,2010,24(5):454-458.(in Chinese)
[9] Huang Yanbo,Lan Yubin,HoffmannWC,et al.Multisensor data fusion for high quality data analysis and processing in measurement and instrumentation[J].Journal of bionic engineering,2007(4):53-62.
[10] 李莉.反馈信息数据融合算法在实时数据处理中的应用[J].测试技术学报,2012,26(1):57-60.
Li Li.Application of feedback information fusion algorithm to real time data processing[J].Journal of Test and Measurement Technology,2012,26(1):57-60.(in Chinese)
猜你喜欢
宇航计测技术(2022年2期)2022-06-01 09:34:44
科学(2020年3期)2020-01-06 04:02:51
测控技术(2018年3期)2018-11-25 09:45:50
航天电子对抗(2018年3期)2018-07-14 02:53:30
电子测试(2018年6期)2018-05-09 07:31:54
电子制作(2017年7期)2017-06-05 09:36:13
百科探秘·航空航天(2016年9期)2016-12-01 03:04:22
系统工程与电子技术(2016年7期)2016-08-21 13:58:56
测绘科学与工程(2016年6期)2016-04-17 06:51:25
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55