光电吊舱无角位移被动减振系统研究
2012-02-05 03:51:42李玉龙何忠波白鸿柏郝慧荣李冬伟
振动与冲击 2012年16期
李玉龙,何忠波,白鸿柏,郝慧荣,李冬伟
(军械工程学院,石家庄 050003)
光电吊舱无角位移被动减振系统研究
李玉龙,何忠波,白鸿柏,郝慧荣,李冬伟
(军械工程学院,石家庄 050003)
根据某型光电吊舱无角位移减振的需求,利用分级减振的设想,设计了一组内外框架减振器,计算了减振器刚度、阻尼系数范围,并对减振器进行了合理的布局,建立了减振系统的Solidworks三维模型,在ADAMS中进行了振动仿真分析,得出单方向输入时系统的幅频响应曲线,并对系统参数进行了优化,确定了减振器的刚度、阻尼系数的最优值,结果表明,该系统实现了三向相等刚度,解除了系统三个方向的线振动耦合,保证了荷载基准与底座基准振动状态下无相对角位移。
被动减振;无角位移;减振器;光电吊舱
现代战争中占据空中侦察、作战的优势越来越重要,作为侦察、监测、校射及打击效能实现的重要装备,机载光电侦察设备日益受到重视,各国竞相研制。但是,由于机载光电侦察设备处在飞机高频振动、姿态变化、风阻力矩及起降时冲击等一系列复杂振动环境下,确保光电侦察设备的稳定,使其具有良好的成像质量成为亟待解决的难题。因此,对光电侦察设备采取减振措施非常必要[1-2]。
目前工程上常采用主动隔振和被动隔振组合的方式对振动进行隔离。被动隔振主要对中高频振动隔振(高于20 Hz);主动隔振主要是对低频振动(一般低于20 Hz)采用陀螺仪实时感知并修正,由于受到陀螺带宽、电机的运转特性以及机械结构固有频率等因素限制,目前控制带宽低于25 Hz,所以,20~500 Hz及以上的振动扰动需采用被动隔振方式[3]。根据现有的光电吊舱多框架减振结构,本文设计了一组内外框架减振器,并用Solidworks建立了内外框架减振器及简化吊舱的三维模型,计算了各减振器的参数范围,又通过Adams/Vibration仿真分析了减振器安装于系统后的减振效果,优化了减振器阻尼系数。结果表明,该内外框架减振器组合而成的减振系统不仅可以达到对中高频(20~500 Hz)被动隔振的目的,又可以消除不同方向线振动耦合引起的角振动,实现三轴向的振动解耦,满足底座与荷载间无角位移的减振要求。
1 减振器结构及减振系统设计
设计减振器的目的是通过减振器组成的被动式减振系统隔离荷载外部的高频振动,并解除不同坐标方向之间的线振动耦合。某型光电吊舱减振器的设计要求为:减振器满足高精度小型化的前提,且在5 g(20~500 Hz)振动时,无角位移减振器三向减振效率不小于20 dB,最大角位移优于(40 μrad)8"(曝光时间内)。
1.1 减振系统设计及模型
根据以上要求,采取分级衰减的思想设计两层减振器,内、外框架减振器截面图如图1(a)、(b)所示:外框架减振器图1(a)内部轴与外壳之间是圆柱副接触,轴的凸肩通过压缩上下两块金属橡胶元件实现轴向的减振;内框架减振器图1(b)轴与组合体实现圆柱副约束,组合体与外壳之间是平面副约束,以实现垂直于轴的两个转动副的约束,且该轴在外壳体的直线导向槽内,以限制垂直于导向槽方向的平动;三组金属橡胶件实现平动自由度上的线振动衰减。减振系统在结构布局上主要采用分级减振和单级减振器在某平面内对称组合的方式,既限制绕X,Y,Z三轴的转动自由度,又在内外两层减振器上实现沿X,Y,Z三轴向的平动减振,减振系统结构如图1(c)所示:四个外框架减振器和飞机平台连接,通过外框架减振器的对称布置限制绕Y轴的转动,并实现沿Y轴方向的减振;八个内框架减振器的对称布置限制绕X,Z轴的转动与Y向的平动,并实现X,Z轴两向的减振,整个系统组合后实现了荷载与底座间三向无角位移减振。图1(c)中,荷载内部安装光电侦查摄像设备;底座等效为吊舱固连与飞机的平台;荷载基座与外框架固连[4-6]。
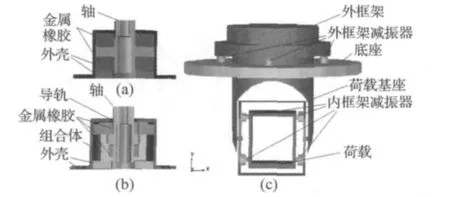
图1 减振器及系统结构图Fig.1 Schematic diagram of dampers and photoelectric pod
由以上隔振系统结构分析可知,本文设计的光电吊舱隔振系统从机械结构上限制了绕X、Y、Z三轴的转动,与传统的三向(或多向)刚度减振器相比,本文设计的减振器为单向刚度减振器的组合,采用分级减振的方法实现光电平台的振动衰减,即从结构上实现了系统仅能沿X,Y,Z三方向平动。因此,该系统每单个方向为单自由度系统,可简化为如图2所示的形式。
由牛顿第二定律可导出单方向运动微分方程:Mx··+cx·+kx=cy·+ky(1)
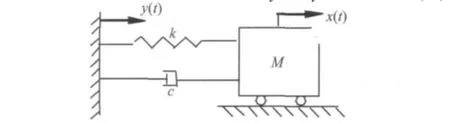
图2 减振系统单方向减振简图Fig.2 Diagram of isolation in one direction
若令光电吊舱内荷载质心沿X,Y,Z轴的位移分别为 x,y,z;底座沿 X,Y,Z 轴的位移分别为 u,v,w;沿 X,Y,Z轴隔振支撑对象的质量分别为mx,my,mz;单个外框架减振器刚度阻尼分别为:kd1,cd1;单个内框架减振器轴向(侧向与轴向相同)刚度和阻尼分别为:kd2,cd2。

可见,该系统的质量矩阵M、刚度矩阵K和阻尼矩阵C均为对角矩阵,即系统X,Y,Z三方向振动相互独立,无耦合。
1.2 减振系统设计理论基础
减振系统设计重点在于确定减振器的刚度系数和阻尼系数,使系统达到比较满意的响应。由于系统单个方向可简化为单自由度系统,设单方向外部干扰振动频率为ω,物体的质量为m,减振器的刚度系数为k,减振器的阻尼为c,系统的阻尼比为ζ,固有频率为ωn。则隔振系统位移传递率为:

T,λ和ζ相互关系曲线如图3所示。
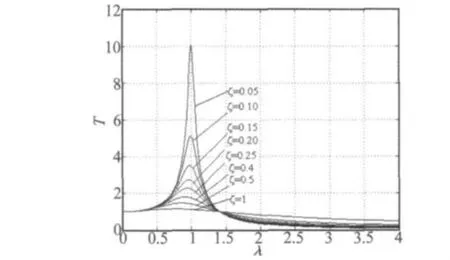
图3 T,λ和 ζ的关系Fig.3 Relation curves of T,λ and ζ
1.3 减振器参数计算
实际中常根据负载重量来平均分配每个减振器的公称载荷,再根据具体的参数和结构空间选取或定制减振器结构尺寸[3]。由减振器的布置方式知,外框架减振器和内框架减振器均为并联,则刚度分配公式为:

其中:kd,cd分别为单个减振器的刚度和阻尼;kz,cz分别为在对应方向上总体减振需要的刚度和阻尼;n为减振器个数。
若设内框架总质量为m1=10 kg,外框架总质量为m2=20 kg(包含减振器质量)。由于指标要求在5 g(20~500 Hz)振动时,三向减振效率不小于20 dB,即20lgT≤-20,则有T≤0.1。又由于:
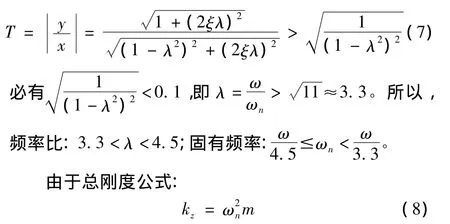
ω取需要衰减的最小频率 f=20 Hz(ω=2πf=125.6 rad/s)计算,有4.4 Hz<fn<6.1 Hz(固有圆频率:28 rad/s≤ωn≤38 rad/s)。
对于外框架减振系统,系统在Y轴方向的总刚度由式(8)计算:15 680 N/m≤kz1≤28 880 N/m;由式(5)可计算单个外框架减振器轴向刚度:3 920 N/m≤kd1≤7 220 N/m。
对于内框架减振系统,系统在X轴与Z轴方向的总刚度由式(8)计算:7 840 N/m≤kz2≤14 440 N/m;由式(5)可计算单个外框架减振器轴向刚度:980 N/m≤kd2≤1 805 N/m。
2 仿真结果与分析
在Solidworks中建立减振系统模型并导入ADAMS中,根据实际情况,创建个零件之间的相互约束关系,并假设各零件为刚体,金属橡胶为无质量的线性弹簧,内框架(带荷载)质量m1=10 kg,外框架质量为m2=8 kg,内框架减振器质量m内=0.16×8=1.28 kg,外框架减振器的质量m外=0.18×4=0.72 kg,定义材料质量时设定密度以确保质量恒定,且各零件的转动惯量采用设定材料相应密度后软件自动计算值[7]。另外,由于降低减振器刚度系数时,减振器变形量会增加,变形量过大会造成减振器质量过大,增大系统尺寸。因此,根据1.3节计算,可选单个外框架减振器刚度为:kd1=7 000 N/m,单个内框架减振器两向刚度为:kd2=1 800 N/m。若暂取阻尼比ξ=0.1,则c=0.2,即有:cd1≈37 N/(m/s),cd2≈10 N/(m/s)。
系统沿X,Y,Z方向的固有频率如表1所示。

表1 沿X轴、Y轴和Z轴三方向的固有频率Tab.1 Nature frequency of three-axis and damping ratio
2.1 频域响应仿真分析
在底座中心位置处的X轴、Y轴及Z轴方向建立三个输入通道及激振器,三个激振器可使模型产生三个方向相互垂直的指定频率范围内的正弦作用力,模拟底座的振动;并在底座中心、外框架中心及荷载中心位置分别建立输出通道沿三个方向的位移、加速度的输出通道,检测系统各零件在不同振动状态下的响应情况[7]。
设定各部件均处于平衡位置,用ADAMS/vibration模块对该减振系统在不同频率下的减振效果进行仿真,分别给出沿三个输入通道以1~500 Hz的正弦扫频作用力,荷载加速度响应的幅频特性曲线及底座加速度响应的幅频特性曲线如图4所示,其中,6 Hz-hezai-X(Y、Z)为隔振系统荷载X(或Y、Z)方向的加速度响应曲线,6 Hz-dizuo-X(Y、Z)为底座 X(或 Y、Z)方向的加速度响应曲线。
分析图4中的各曲线,以底座的响应为参考(输入激励),评估荷载的振动情况:三向响应曲线均在外部干扰为6 Hz(固有频率)附近时荷载的振动响应最大,当干扰大于8.2 Hz时起减振作用,在20 Hz时光电吊舱荷载的加速度响应约为输入的1/10(衰减约20 dB),100 Hz以上时甚至可以达到0.1%(衰减约40 dB),达到了在20 Hz以上振动时三向衰减不小于20 dB的指标要求。

2.2 单输入时三方向的传递函数
由以上仿真结果还可以得到沿单方向输入时三方向的输出位移的传递函数如图5所示。
其中,6 Hz-hezai-X(Y,Z)为隔振系统荷载 X(或 Y,Z)方向的位移响应曲线,6 Hz-dizuo-X(Y,Z)为底座 X(或Y,Z)方向的位移响应曲线。由5图可知,激励沿X(或Y,Z)单方向输入时,荷载仅在X(或Y,Z)但方向上有位移响应,另外两方向均位移响应近似为零,且仅在6 Hz附近有唯一峰值。可见,该隔振系统X,Y,Z三方向的振动互不干涉,无相互耦合。仿真结果证明,该内外框架减振器组合后能够实现三轴向的振动解耦,底座与荷载间无相对角位移,且能实现三轴向线振动的衰减。
3 减振系统参数优化
由于提高系统的隔振率不但要保证系统有一定固有频率,还要控制阻尼比使系统在固有频率附近影响不至于过大,为了进一步提高系统的减振效果,需对系统参数进行优化。以X方向为例对减振器阻尼进行优化,结果如图6所示,横轴为内框架减振器在X方向的阻尼系数,纵轴为荷载在固有频率处的加速度响应幅值。
当X方向单个减振器阻尼系数分别取1 N·m/s,3 N·m/s,5 N · m/s,10 N · m/s,15 N · m/s,20 N·m/s,25 N·m/s,30 N·m/s时,荷载 X 向加速度响应的幅频特性如图7所示。
由图7可得,当单个内框架减振器X方向阻尼系数为10 N·m/s时,系统在固有频率附近响应相对较小,且在高频振动时有较好的减振效果。按照同样的方法对Y,Z方向减振阻尼系数进行优化,结果表明单个外框架减振器Y方向阻尼系数应取40 N·m/s,单个内框架减振器Z方向阻尼系数应取10 N·m/s,优化后系统的三向固有频率和阻尼比如表2所示。


表2 优化后系统三向固有频率和阻尼比Tab.2 Optimize result of nature frequency and damping ratio
由以上分析可知,如果继续降低固有频率(即减振器刚度系数),减振效率会继续加大,但是考虑到减振器的变形量会增加[8],减振器的尺寸也相应的增大,无法在小巧的光电吊舱中使用,仿真结果证明本文选取的减振器刚度系数为最优值。
4 结论
本文根据某光电吊舱无角位移减振的需求,利用分级减振的设想,设计了一组内外框架减振器,计算了减振器刚度、阻尼系数范围,并对减振器进行了合理的布局,建立了减振系统的三维模型,并在ADAMS中进行了振动仿真分析,得出了单方向输入时系统的幅频响应曲线,荷载位移在各方向的传递函数曲线。结果表明,该减振系统满足设计要求,实现了三相等刚度及三个方向的振动解耦,保证了荷载基准与底座基准角位移的一致性。还通过仿真试验对系统参数进行了优化,确定了减振器的刚度系数和阻尼系数最优值,为下一步实物试验打下了基础。
但是,从工程化的角度来说,由于存在加工装配误差,各减振器的一致性和绝对对称布置均很难保证,各零件也并不是刚体,且金属橡胶是一非线性结构阻尼材料并不是线性无质量弹簧,而仿真试验中都做了理想简化,因此,仿真与实际还有一定的差距,需要在下一步工作中进行详细的设计、工程实现与试验验证。使减振器结构更加紧密,加工更加简便,一致性更好,最终实现该减振系统的工程应用。
[1]张 葆,贾 平,黄 猛,等.动载体成像系统底座无角位移减振器的设计[J].光学技术,2003,29(4):464 -466,472.
[2]张 葆,贾 平,黄 猛.动载体成像模糊的振动被动控制技术[J].2003,29(3):281 -283.
[3]朱石坚,楼京俊,何其伟等.振动理论与隔振技术[M].北京:国防工业出版社,2008.
[4]甘至宏.光电吊舱内框架减振系统设计[J].光学精密工程,2010,18(9):2036 -2043.
[5]田素林,白鸿柏,张 葆,等.机载多框架光电吊舱无转角隔振方式设计[J].长春理工大学学报,2009,32(4):538-541.
[6]马芳贤,王会利,牟让科.航空用新型金属橡胶减振器设计分析研究[J]. 振动工程学报,2008,21(S):106-110.
[7]陈立平,张云清,任卫群,等.机械系统动力学分析及ADAMS应用教程[M].北京:清华大学出版社,2005.
[8]王 珂,顾逸东.空间科学实验柜被动式减振系统研究[J]. 空间科学学报,2006,26(6):470-476.
Non-angular displacement passive vibration isolation system for optical pod
LI Yu-long,HE Zhong-bo,BAI Hong-bai,HAO Hui-rong,LI Dong-wei
(Ordnance Engineering College,Shijiazhuang 050003,China)
According to the demand of non-angular isolation for a certain optical pod,a new type of inner and outer shock absorbers which can limit the angular displacement between the base and load were designed.The stiffness and damping of the absorbers were calculated,and the vibration isolation system on which the two absorbers are reasonably placed was also designed.The three-dimensional models of the absorbers and the system were built by using the software of Solidworks,then the system was simulated by using ADAMS/vibration.The frequency response curves were obtained,and the optimal stiffness and damping were also achieved by the simulation optimization,The results show that the new system has all the same stiffness in three directions,and can remove the linear vibration coupling and the relative angular displacement between the load and base.
passive vibration isolation;non-angular displacement;shock absorber;optical pod
TH113.25
A
国家自然科学基金(50775220);军械工程学院原始创新基金(YSCX004);武器装备“十一五”预先研究资助项目(51312040405)
2011-06-20 修改稿收到日期:2011-08-29
李玉龙 男,硕士生,1986年生
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:08:34
机电信息(2021年17期)2021-07-01 05:14:00
中学生数理化·八年级物理人教版(2019年4期)2019-05-20 10:02:36
装备制造技术(2018年10期)2018-12-24 02:24:46
课程教育研究·学法教法研究(2018年14期)2018-08-11 09:09:46
光学仪器(2016年5期)2017-01-12 14:28:05
九江学院学报(自然科学版)(2015年2期)2015-11-12 03:35:09
发明与创新(2015年26期)2015-02-27 10:39:31
机床与液压(2014年3期)2014-03-17 01:16:44
汽车科技(2014年6期)2014-03-11 17:45:36