
基于模糊PID的三容水箱液位控制
2012-02-03 00:52张雅婕
武汉工程职业技术学院学报 2012年3期
李 智 王 君 张雅婕
(武汉工程职业技术学院 湖北 武汉:430080)
0 引 言
液位控制及其应用极其普遍,其中不乏一些大型的复杂系统。它主要有以下几个特点:(1)时滞性;(2)时变性;(3)非线性。这几个特点都严重影响PID控制的效果[1]。模糊控制不需要精确的数学模型,因而是解决不确定性系统控制的一种有效途径。但是,单纯的模糊控制也存在精度不高、易产生极限振荡等问题。因此,把PID和模糊控制技术结合起来,取长补短,可使系统的控制性能得到提高,是一种很实用的控制方法[2]。
1 三容水箱实验系统简介
实验系统逻辑结构如图1所示:该实验系统由三个水箱,一个水泵,一个电磁调节阀,一个大蓄水箱和其他负载阀门组成。该系统还包括了传感器、执行器、I/O连接板,并与上位机通信。通过组态软件可以实时的显示各水箱液位和上水箱的水流入量。水流入量Qi由电磁调节阀控制;上、中、下三个水箱的流出量Q1、Q2、Q3则由负载阀来改变[3]。
通过上位机的组态软件可以设置液位给定值,即系统稳定后下水箱液位应达到的高度。液位输出值(即通过传感器监测到的下水箱的实时液位)也将在上位机的组态监控画面中显示出来。计算机将液位给定值和液位输出值做比较,得到的差值称为液位误差变化量e,以下设计的控制器就是要以最优化的方法使得e=0。

图1 三容水箱数学模型的测定实验
2 模糊PID控制器的设计
2.1 模糊PID控制器的结构设计
为了保证模糊控制器的控制效果,又要避免控制规则过于复杂,故采用二维模糊控制器。即模糊控制器的输入量为液位变化e和液位变化率ec,其输出量为利用模糊控制规则对PID三个参数进行修改的变化量ΔKP、ΔKI和ΔKD。模糊PID控制器其结构如图2所示[4]。
2.2 精确量的模糊化
本系统中的液位变化e、液位变化率ec和控制输出量ΔKP、ΔKI和ΔKD都为精确量,为了进行模糊控制需要将它们的值转化为模糊论域上的模糊值。
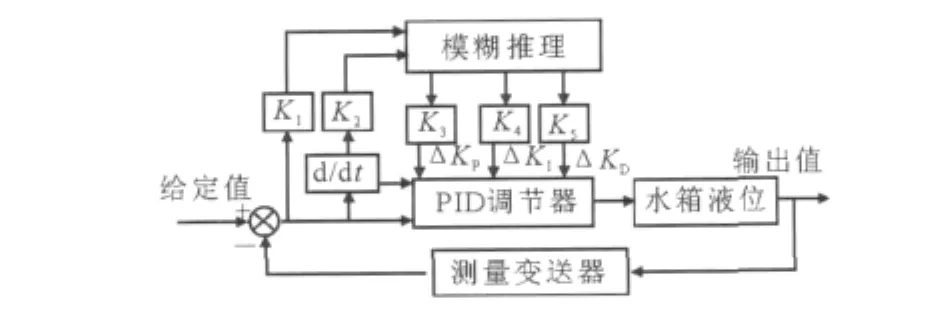
图2 模糊PID控制器结构
由实验中对液位的控制要求,设液位误差e在(-3mm,+3mm)内,液位误差变化率ec的基本论域为(-0.1mm/s,+0.1mm/s)。若e和ec的论域选得越大,控制精度越高,但会增加控制器的复杂程度。因此,可将e和ec模糊语言变量量化到整数论域{-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},可得到量化因子Ke=n/xe=6/3=2,Kec=m/xec=6/0.1=60。
2.3 模糊控制器的控制规则
模糊控制规则的设计包括三部分的设计内容:选择描述输入输出变量的词集、定义各模糊变量的模糊子集以及建立模糊控制器的控制规则。
(1)选择描述输入和输出变量的语言变量
若模糊词集选择过多,会使得控制规则变得复杂;若模糊词集选择过少,又会使变量变得粗糙,导致控制器的性能变坏。根据系统的实际需要,将下水箱液位的变化e和液位变化率ec以及3个输出ΔKP、ΔKI和ΔKD都采用七个词集来描述,即其模糊子集均为{NB,NM,NS,O,PS,PM,PB},子集中元素分别代表负大,负中,负小,零,正小,正中,正大。
(2)制定模糊变量的模糊子集
选择模糊变量的模糊隶属度函数时,在误差较大的区域采用低分辨率的模糊集,在误差较小的区域采用高分辨率的模糊集。因此,各模糊子集的隶属度函数中NB和PB采用正态型分布;NM、NS、ZO、PS、PM都采用三角形分布,则可得各模糊变量的隶属度函数图及相应的模糊控制系统构成图如图3,图4所示。
根据上述隶属度函数曲线,得到e和ec的隶属度赋值表如下,ΔKP、ΔKI和ΔKD的类似,在此就不再一一列举了。
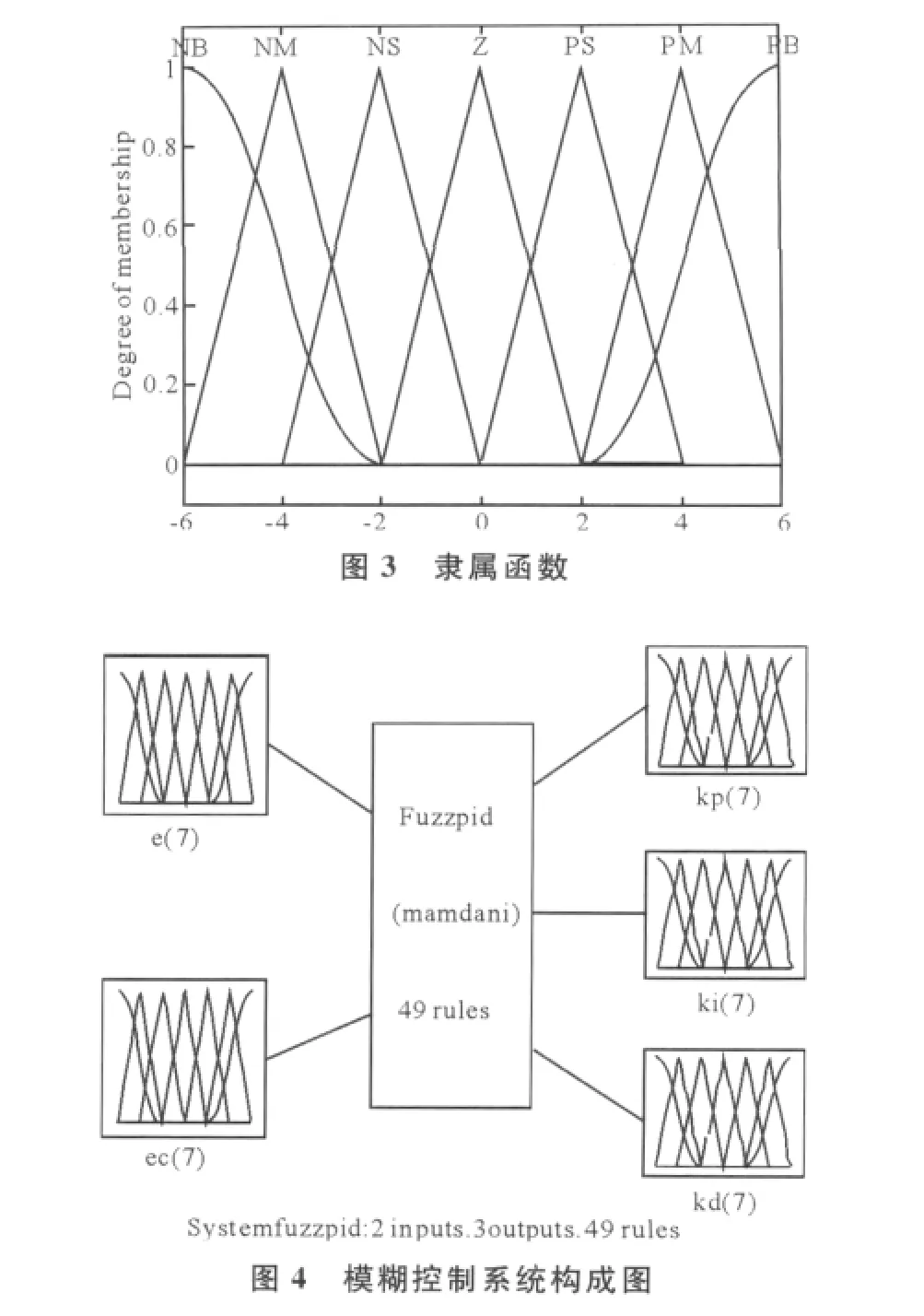

表1 偏差及偏差变化率隶属度表
(3)建立模糊控制规则
结合对液位调节时PID参数的整定规律,并虑到在不同时刻e、ec二个参数的作用以及它们之间的藕合关系,可得到针对ΔKP、ΔKI和ΔKD三个参数分别整定的模糊控制表如表2所示。

表2 ΔKP,ΔKI,ΔKD的模糊校正规则表
由前面的讨论可设计模糊PID控制算法的流程图,如图5所示。

图5 模糊PID控制算法流程图
3 三容水箱液位控制实验
在现代集成监控系统中,通常要求控制系统具备形象、直观、友好的人机交互界面。本设计利用了组态王KingView6.5强大的图形编辑功能,丰富的动画连接方式,实时数据库操作能力,设计了三容水箱液位监控系统。上位机采用组态王KingView 6.5进行监控画面组态和控制程序的编写。在相同的条件下分别进行了单纯PID控制和模糊PID控制实验,以检验模糊PID的实际控制效果[5]。
通过操作界面,先选择单纯PID控制,并设置相应的PID参数,操作效果如图6所示。下水箱液位在设定值平衡大约需要20分钟,有一定的超调量。从曲线上看,整个控制过程较为理想。

图6 PID控制实验
图7所示为选择模糊PID控制重复以上的液位控制实验。下水箱液位在设定值平衡大约只要12分钟,基本没有超调,响应速度较快,稳态误差也较小。结果表明,模糊PID控制器确实能改善系统的动态和静态性能。

图7 模糊PID控制实验
下面的实验将从鲁棒性和抗干扰性方面比较PID和模糊PID的控制效果。在这一组实验中,当下水箱液位第一次达到设定值的时候,开启另一水泵(该水泵不受电磁调节阀控制,由手动控制),即两水泵同时向上水箱注水。等到电磁调节阀开度为零时,即受控水泵不再注水,关闭手动控制水泵。图8、图9分别是PID和模糊PID控制下的实验效果图。

从上面的两实验图比较可以看出,模糊PID较PID鲁棒性和抗干扰性更好。当扰动产生时,系统可以更快的做出响应,更准确的追踪设定值。这主要由于模糊PID能根据e和ec的不同实时地调整比例、积分、微分系数,从而提高了PID控制器的总体控制性能。
4 结 论
利用设计的控制算法,通过上位机监控系统的监控,比较了传统PID和模糊PID在这种典型大惯性、大时延、非线性系统中的控制效果。通过观察对比传统PID和模糊PID在控制实验和扰动实验中的曲线发现,当改变注入容器的液体时,传统PID控制效果在较长的时间后才能得到体现,这会使得最后的稳态误差较大,液位在期望值附近波动。而模糊PID相对反应较快,这就使得最后稳态误差较小,液位在期望值附近几乎没有波动。本文设计的模糊PID控制器在实验中取得了较为理想的控制效果,该系统既保持了模糊控制灵活而适应性强的优点,又具有传统PID控制的广泛适用性和控制精度高的特点,为大滞后、时变、非线性的液位控制提供了一种有效可行的方法。
[1] 郭一楠,常俊林.过程控制系统[M].北京:机械工业出版社,2009:11-13.
[2] 诸 静.模糊控制理论与系统原理[M].北京:机械工业出版社,2005:102-105.
[3] 李 智,张雅婕,杨 洁.基于实验的三容水箱数学模型[J].武汉工程职业技术学院学报,2009,21(3):1-4.
[4] 刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2003:67-81.
[5] 李 智.基于模糊PID的三容水箱液位控制[D].呼和浩特:内蒙古大学理工学院,2007.
猜你喜欢
石油工业技术监督(2022年7期)2022-08-18
电子制作(2017年19期)2017-02-02
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
工业设计(2016年11期)2016-04-16
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
小雪花·成长指南(2015年10期)2015-10-23
汽车维护与修理(2015年2期)2015-02-28
自动化博览(2014年12期)2014-02-28
